
基于BP神经网络模型的MEMS加速度计误差补偿方法
2018-05-14 15:33郭卫杨鹏飞张武刚王巍
中国测试 2018年3期
郭卫 杨鹏飞 张武刚 王巍


摘要:现阶段普遍采用多元线性回归对加速度计误差建模.并利用最小二乘法对模型参数辨识,但其对加速度计精度提高有限,因此该文提出一种基于BP神经网络模型的MEMS加速度计误差补偿方法。该方法利用BP神经网络建立加速度计误差模型,通过多位置翻滚进行实验数据测量,并对模型进行训练,最后利用训练好的模型对加速度计误差进行补偿。比较多元线性回归和BP神经网络建模对加速计误差补偿结果,其标准偏差分别为0.0019g和0.00016g。结果表明误差下降一个数量级,说明BP神经网络能有效地补偿加速度计误差。
关键词:加速度计;BP神经网络;多元线性回归;误差补偿模型
0引言
微机电系统(micro-electro-mechanical systems,MEMs)惯性器件由于体积小,质量轻,成本低,不受外界干扰,输出频率高及可靠性好等优点被广泛地应用到各种场合。惯性测量单元(inertial measurementunit,IMU)是用来测量载体自身线加速度和角加速度的装置,其测量精度与MEMS惯性器件的加工工艺及安装精度有关。加速度计为IMI中的主要元件,因此需要研究其误差补偿方法来提高测量精度。
有关加速度计误差补偿,文献分别采用6位置、10位置、12位置和24位置等多位置翻滚标定法,根据确定位置的理论加速度和传感器的测量值来解算传感器标定系数矩阵中的未知量。文献[8]采用一种基于椭球拟合的方法对传感器进行误差补偿,但这种方法要想得到最佳椭球拟合,搜索最优解的速度较慢,一般施加充分但非必要条件的椭球约束。文献提出一种基于卡尔曼滤波初始对准的标定加速度计零偏和安装误差角的新方法,利用对准阶段的水平失准角估值标定和补偿上一标定阶段残余的加速度计误差,但其精度依赖于对速度误差的测量精度。上述方法都是以影响精度的因子为基础,采用线性回归方法进行建模,这种建模方法在解算传感器标定系数时都使用的是同一位置的平均值,因此不能充分反映加速度计的特性,而且在面对复杂的线性关系时显得无能为力。近年来,神经网络的发展取得了很大的进展,应用的领域也非常广泛,与多元线性回归相比,神经网络在复杂函数上的拟合具有很好的表现,在传感器的性能补偿方面也取得了显著的成果。本文将BP神经网络技术应用到加速度计补偿模型的建立上,以实现对加速度计误差补偿,并取得了较好的成果。
1MEMS加速度计误差补偿原理及模型建立
1.1 MEMS加速度计误差补偿原理
MEMS加速度计的误差补偿是根据加速度计的输入a与输出A之间的差来建立补偿模型,利用建立好的误差补偿模型对加速度计的输出数据进行补偿,补偿后的输出结果为a。其补偿原理如图1所示。
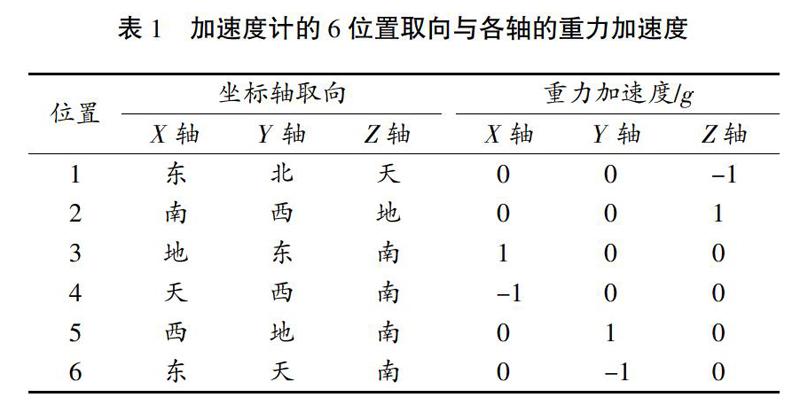
加速度计的主要测试方法有重力场静态翻滚测试、离心机测试和线振动测试等。由于重力加速度最容易获得,并能精确测定其大小和方向,具有测试方便和结果精确的特点,因此本文选择重力场静态翻滚测试法。通过选取6个不同的位置东北天、南西地、地东南、天西南、西地南、东天南来获取实验数据。表1为MEMS加速度计的6位置取向以及在该位置下各轴的标准重力加速度。
1.2 MEMS加速度计误差补偿模型建立
1.2.1多元线性回归
通过建立准确的MEMS加速度计误差模型能够有效地补偿相关的误差以提高加速度计的测量精度。对MEMS加速度计的误差形成原理进行分析,总结产生误差的主要来源有两个方面,一方面是由于载体在线运动和角运动引起的各种干扰力矩,另一方面是由于质性器件本身在设计、工艺加工不完善等内部造成的干扰力矩。其主要类型有刻度因数误差、零偏误差、轴失准角误差,其中零偏误差和刻度因数误差对传感器输出误差带来的影响最大。由于制作工艺的原因,加速度计3个敏感轴并非完全正交而产生轴间非正交误差,同时传感器在安装过程中也会带来安装角误差,轴间非正交误差和安装角误差作用效果相似,可以统一规划为安装误差。
根据补偿原理与系数解算方式可得MEMS加速度计误差模型方程为
鉴于本文目的是验证BP神经网络在MEMS加速度计误差补偿上的有效性研究,因此不考虑二次误差对其精度的影响,则MEMS加速度计误差模型变为
1.2.2 BP神经网络
通过BP神经网络建立MEMS加速度计的误差补偿模型,该方法把未知模型看成是一个黑匣子,将MEMS加速度计的测量值作为系统的输入,将相应位置的标准重力加速度作为输出值,利用大量的样本对BP神经网络进行训练。最后利用训练得到的模型对未知数据进行预测。
BP神经网络模型由输入层、输出层及隐藏层组成,隐藏层的个数以及神经元数对BP神经网络训练速度和精度有很大的影响。根据本文的数据特點为三轴加速度计,因此输入层的神经元数目为3,分别对应加速度计的3个测量值x、y、z;输出层的神经元数也为3,分别对应加速度计的3个标准值x'、y'、z;为了验证BP神经网络模型在MEMS加速计误差补偿上的可实施性,将隐藏层的个数设为1,神经元的个数设为12。
2方法
2.1最小二乘法
根据样本数据对多元线性回归模型中参数的求解方法(最小二乘法和最大似然法等),本文采用的是最小二乘法。记样本测量值y与使用估计回归模型计算的估计值y之间的偏差(或称拟合误差、残则(即最小二乘准则)来确定待定参娄β0币β1的方法称为最小二乘法(least squares,Ls)。用公式表示,最小二乘法满足如下最小二乘准则:
在给定某组样本数据的条件下,就可以求出未知的参数。
2.2 BP神经网络模型训练
BP神经网络模型的输入层和输出层分别对应样本数据中的输入集和输出集。在这两层中间称为隐藏层,其可为一层或多层。每个在一个特定层的神经元都与下一层所有神经元相连接。输入层有i个神经元,输出层有i个神经元,隐藏层有h个神经元,输入层第i个神经元和隐藏层第h个神经元之间的连接权值为‰,隐藏层第h个神经元和输入层第i个神经元的连接权值为w,则隐藏层的第h个神经元输入表达式为
BP神经网络属于有监督学习,因此在它的输出层存在一个标准的期望输出值。在训练开始前计算机随机生成一组向量作为权值分配给各输入分量,随后由事先定义的决策函数根据输入量计算得到输出数据,并根据输出结果与真实数据之间的误差反复修正权向量,直至模型输出值与标准的误差达到限值,最后使用训练好的模型对加速度计误差进行补偿。其算法流程如图2所示。
3实验验证
实验使用一款三轴一体的数字惯性测量产品来对本文中的误差建模方法进行验证。为了避免不必要的干扰因素存在,首先对实验的三维转台进行垂直校准,将设备上电预热5 min,保证信号平稳输出,然后根据文中所述的6个不同位置进行实验数据的测量。为保证实验数据的有效性,对每个位置的实验数据测量时间达到10min。
3.1多元线性回归预测结果
对每个位置的数据取平均,则MEMS加速度计的X、Y、Z轴的输出结果如表2所示。
由于加速度计误差模型为4项多项式,直接用代数运算比较繁琐,为了更方便地求出模型中的参数,解算时需要对每个加速度计建立矩阵方程,建立X轴加速度计误差模型的矩阵形式:
3.2BP神经网络预测结果
设置模型输出值与标准的误差限值为0.0001,循环次数限值为5000,利用实验数据对BP神经网络模型进行训练,在1000次训练后精度趋于稳定。取未经训练的实验数据,利用训练好的BP神经网络模型对加速度计误差补偿的结果如图3所示。从图中可以看出,通过BP神经网络对MEMS加速度计的预测输出值在一个较小的范围内围绕其期望输出上下波动,表明采用BP神经网络对MEMS加速度计进行误差补偿是可以实现的。
3.3实验结果对比分析
为了更好地比较两种方法对MEMS加速度计标定的效果,通过用加速度计测量的数据带入到已建立好的两个加速度计误差模型中,求出补偿后的数据并作图,图4~图6分别为MEMS加速度计X、Y、Z轴的BP神经网络模型和多元线性回归模型,以及期望输出对加速度计误差补偿的对比结果。表3是对两种模型补偿结果均值和标准偏差的对比。
从图4~图6可看出,MEMS加速度计X、Y、Z轴的BP神经网络误差补偿的结果总在期望值上下有微小波动,而多元线性回归的误差补偿结果虽然能代表期望输出,但效果没有BP神经网络预测的精度高。从表3的对比分析可以发现,BP神经网络预测结果的均值和标准偏差都要比多元线性回归预测的小。
4结束语
本文建立了一种基于BP神经网络的MEMS加速度计误差补偿模型,并与多元线性回归补偿结果比较,实验结果表明BP神经网络对加速度计误差补偿精度高。BP神经网络具有高效的曲线拟合功能和优越的复杂非线性函数逼近能力等特點,将其应用在MEMS加速度计误差补偿上,证明是可行的,并且使精度提高了一个数量级,这为今后提高MEMS加速度计误差补偿精度奠定了基础。
猜你喜欢
合作经济与科技(2017年1期)2017-01-03
中国科技纵横(2016年15期)2016-12-29
现代经济信息(2016年27期)2016-12-16
时代金融(2016年29期)2016-12-05
价值工程(2016年30期)2016-11-24
中国远程教育(2016年9期)2016-11-19
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
科技视界(2016年20期)2016-09-29
商(2016年20期)2016-07-04
