
具有异步控制器的离散马尔可夫跳变Lur’e系统的稳定性和e2增益性能分析
2018-05-30 10:48陶跃跃
南京信息工程大学学报 2018年6期
陶跃跃

摘要
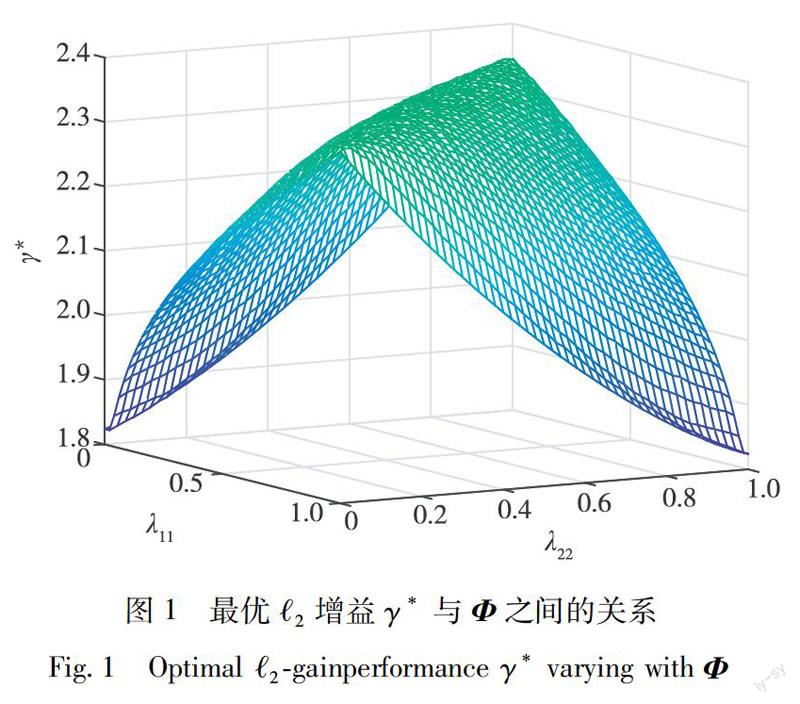
本文研究了一类具有异步控制器的离散马尔可夫Lure跳变系统的稳定性及 2增益性能.通过引入隐马尔可夫模型(HHM)来描述所设计的控制器和原始系统之间出现的异步现象.利用线性矩阵不等式(LMI)方法分析了闭环系统的稳定性和 2增益性能.然后提出了一个充分条件使得闭环系统随机稳定,并使得从扰动到系统输出的 2增益达到最小.同时,通过求解给定条件来设计一个由线性状态反馈和扇形有界非线性输出反馈组成的异步控制器.最后,给出了一个数值仿真例子来验证所提方法的有效性.
关键词 马尔可夫跳变系统;Lure系统;e2增益;随机稳定性;异步控制器
中图分类号 TP273
文献标志码 A
0 引言
作为一类重要的随机切换系统,马尔可夫跳跃系统(MJSs)因其对有参数或系统结构突然变化的系统建模中的强大能力而备受关注,例如,环境干扰、执行器故障和子系统中的互连变化等.在过去的几十年中,大量用于稳定性分析和控制器/滤波器设计的工作已经被发表,如文献[1-6].
在大多数现有工作中,通常假设控制器/滤波器能够获得全部的系统模态信息,因此控制器/滤波器模态可以与系统模态同步运行.不幸的是,在实际应用中,由于一些意想不到的因素,例如时间延迟、网络控制系统中的丢包及量化等,上述理想假设很难被满足.为了克服这个严格的限制,学者们提出了两种研究方法,分别被称为模态非依赖方法和异步方法.在模态非依赖方法[6-7] 中,控制器的模态是与系统模态相互独立的,也就是说,系统模态不会影响到控制器的模态.但是这样也使得系统模态信息未被有效利用,可能会导致一些保守性.因此,利用异步方法来研究马尔可夫跳变系统的控制/滤波问题在近几年得到了更多的关注.文献[8]针对一类具有随机出现传感器非线性的离散马尔可夫跳变系统,使用一个分段齐次马尔可夫链设计了一个异步 2- ∞滤波器,使得系统随机稳定.文献[9]又采用一种新的隐马尔可夫模型设计了一个异步控制器,来确保系统的被动性能;同时,文中提出的方法覆盖了同步的情况.近年来,借助这种隐马尔可夫模型,许多学者针对异步控制器/滤波器设计问题进行了大量的研究.例如,文献[10]设计了一个针对网络控制系统的异步滤波器.文献[11]和[12]分别对离散、连续马尔可夫跳变系统的异步滤波器设计问题进行了讨论.文献[13]则针对一类系统信息部分已知的离散马尔可夫跳变系统,设计了一个异步控制器,并保证系统是随机稳定的.
非线性是一种在实际控制系统中普遍存在的现象.在众多非线性系统模型中,Lure系统[14] 在近年来受到了许多关注.该系统由一个线性部分和一个扇形有界的非线性组成.针对Lure系统的稳定性及控制器/滤波器设计问题,学者们已经进行了大量的研究.文献[15]和[16]分别在离散时域和连续时域讨论了具有饱和和扇形有界的非线性Lure系统的绝对稳定性问题.他们采用了一种由线性状态反馈和扇形有界的非线性输出反馈组成的控制器,大大提高了系统设计的灵活性,同时降低了结论的保守性,这一控制器结构被其他研究者大量采用.文献[17]针对一类系统模态转移矩阵部分已知且具有控制器饱和的离散时域非线性马尔可夫跳变系统,采用随机二次型李雅普诺夫泛函研究了系统稳定性和 2增益问题.随后,文献[18]采用了一种新型的李雅普诺夫泛函,即Lure型李雅普诺夫泛函,该泛函包含了文献[17]中的随机二次型部分,同时添加了随机扇形有界的非线性部分,使得所得结果的保守性更低.文献[19]采用了随机Lure型李雅普诺夫泛函研究了离散系统的随机稳定性问题.迄今为止,离散马尔可夫Lure跳变系统的异步控制器设计问题仍然未见相关报道,这促使我们进行现在的工作.
本文研究了一类具有异步控制器的离散马尔可夫Lure跳变系统的随机稳定性及 2增益最优化问题.本文的主要贡献如下:1)根据隐马尔可夫模型,设计了一个包含线性状态反馈和扇形有界的非线性输出反馈的控制器;2)给出了一个LMI形式的且使得系统具有最小 2增益性能的充分条件.本文以下面的方式组织:第一部分介绍了系统模型,并给出了一些需要的预备知识;第二部分首先分析了待分析系统的随机稳定性问题,然后设计了一个控制器来确保系统的随机稳定性且使得系统具有最小 2增益;第三部分提供了一个数值仿真例子来阐述本文所提方法的有效性;第四部分为总结.
1 预备知识
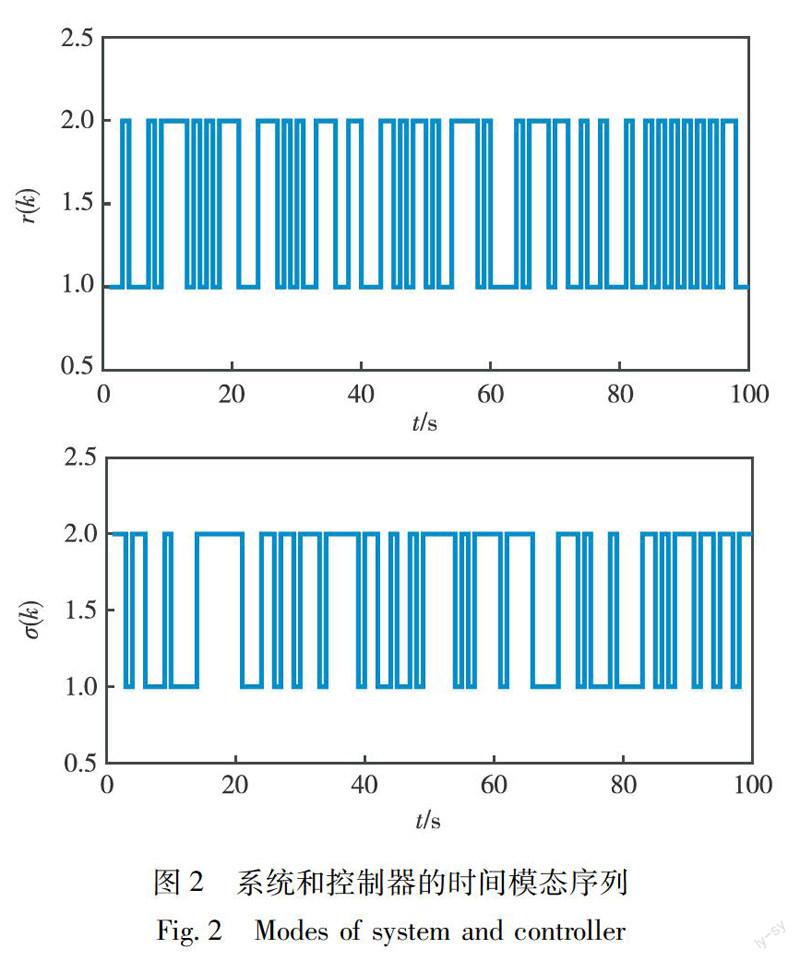
图2给出了一个可能的系统模态和控制器模态时间序列.本文选择系统初始状态为 x 0= 2,-2.5 T ,外界扰动假定为 w k= sin (k)×0.85 k.由图3可以看出,当系统未采用控制器时,系统是不稳定的.但是将设计的控制器施加到系统中时,可以得到如图4所示的系統状态曲线以及图5所示的系统输入曲线.通过对比图3及图4、图5可以发现,所采用的控制器可以使得系统从不稳定变成稳定的系统,说明本文方法是正确且有效的.
4 结论
本文设计了一种由线性状态反馈及满足扇形有界的非线性输出反馈组成的异步控制器,研究了一类离散马尔可夫跳变Lure系统的随机稳定性及 2增益问题.控制器模态与系统模态之间的异步由一个隐马尔可夫模型描述.在线性矩阵不等式及李雅普诺夫泛函方法的帮助下,我们分别在系统随机稳定性及 2增益问题上得到了两个定理.文中给出了一个数值例子来验证提出方法的有效性.但是,值得注意的是,在未来仍然有许多有意义的工作可以讨论.例如,对于含有异步控制器的马尔可夫跳变Lure系统,由于系统模态概率转移矩阵 Π 及控制器条件模态概率转移矩阵 Φ 的信息很难全部得到,因此研究含有不确定元素的情况是非常有意义的.另一方面,如果采用文献[19]介绍的新型李雅普诺夫泛函或许可以得到一个更加不保守的稳定性条件.
參考文献
References
[ 1 ] Lin H,Su H,Chen M Z Q,et al.On stability and convergence of optimal estimation for networked control systems with dual packet losses without acknowledgment[J].Automatica,2018,90:81-90
[ 2 ] Karan M,Shi P,Kaya C Y.Transition probability bounds for the stochastic stability robustness of continuous-and discrete-time Markovian jump linear systems[J].Automatica,2006,42(12):2159-2168
[ 3 ] Lu R,Zou H,Su H,et al.Robust D-stability for a class of complex singularly perturbed systems[J].IEEE Transactions on Circuits & Systems Ⅱ:Express Briefs,2008,55(12):1294-1298
[ 4 ] Lu R,Xu Y,Xue A,et al.Networked control with state reset and quantized measurements:observer-based case[J].IEEE Transactions on Industrial Electronics,2013,60(11):5206-5213
[ 5 ] Wu Z G,Shi P,Su H,et al.Stochastic synchronization of Markovian jump neural networks with time-varying delay using sampled data[J].IEEE Transactions on Cybernetics,2013,43(6):1796-1806
[ 6 ] Todorov M G,Fragoso M D.New methods for mode-independent robust control of Markov jump linear systems[J].Systems & Control Letters,2016,90:38-44
[ 7 ] Wu H N,Cai K Y.Mode-independent robust stabilization for uncertain Markovian jump nonlinear systems via fuzzy control[J].IEEE Transactions on Systems,Man & Cybernetics,Part B(Cybernetics),2006,36(3):509-519
[ 8 ] Wu Z G,Shi P,Su H,et al.Asynchronous e2 infty filtering for discrete-time stochastic Markov jump systems with randomly occurred sensor nonlinearities[J].Automatica,2014,50(1):180-186
[ 9 ] Wu Z G,Shi P,Shu Z,et al.Passivity-based asynchronous control for Markov jump systems[J].IEEE Transactions on Automatic Control,2017,62(4):2020-2025
[10] Shen Y,Wu Z G,Shi P,et al.Asynchronous filtering for Markov jump neural networks with quantized outputs[J].IEEE Transactions on Systems,Man & Cybernetics:Systems,2018,99:1-11
[11] Zhang H,Lun S,Liu D.Fuzzy H ∞ filter design for a class of nonlinear discrete-time systems with multiple time delays[J].IEEE Transactions on Fuzzy Systems,2007,15(3):453-469
[12] Shanlingdong S,Wu Z G,Pan Y J,et al.Hidden-Markov-model-based asynchronous filter design of nonlinear Markov jump systems in continuous-time domain[J].IEEE Transactions on Cybernetics,2018,99:1-11
[13] Song J,Niu Y,Zhao H,et al.Finite-time e 2-e ∞ control of Markovian jump linear systems with partly accessible hidden information via asynchronous output feedback[C]∥2017 11th Asian Control Conference.IEEE,2017:2447-2452
