
大功耗星载电子设备平面度分析与控制设计
2018-06-01 01:07王东
机械设计与制造工程 2018年5期
王 东
(中国电子科技集团公司第十研究所,四川 成都 610036)
星载电子设备需要承受运输、发射、爬升及在轨工作等各个阶段的热环境,尤其是在入轨工作后,会受到真空、微重力、深冷空间、粒子辐照、太阳紫外辐射及轨道热源等空间环境因素的共同作用,使星载电子设备所面对的热环境异常复杂[1]。因此,如何使星载电子设备具有很高的可靠性和热环境适应性是其结构设计的关键内容。
安装在卫星舱体内部的电子设备,由于处在真空状态,自然对流无法产生,只能通过与安装平台间的传导、与舱壁及周围设备间的辐射来实现热量的耗散[2]。为了提高辐射散热,可以通过采用增大有效辐射表面积、对设备外表面做发黑处理以提高表面发射率等方法来实现。传导则需要金属良导体来实现。根据固体导热的傅立叶定论可知,两个相互接触的表面之间实现接触传热,在材料、导热路径等因素不变的情况下,接触面积的大小决定了热传导的效果。接触表面的平面度决定了两个表面间的接触状况,对设备的散热有着重要的影响,因此在热设计中需要重点考虑。通常情况下,安装面平面度需不大于0.1mm/(100mm×100mm)。
本文对某大功耗星载电子设备进行了构型设计和平面度分析计算,并通过实物测试,验证了设计的正确性和可行性。
1 构型设计
星载电子设备的构型种类繁多,主要有箱体内插板式、模块化组合或拼接式、盒体式等[3]。其中,模块化组合或拼接式构型因其具有扩展性好、维修方便等优点,是星载电子设备的首选构型。如图 1所示的传统拼接式星载电子设备通常将多个功能模块彼此之间通过螺栓联接,再固定在公用底板上,然后与卫星平台连接。

图1 传统的模块化星载电子设备构型
传统构型的星载模块化电子设备的安装底板为单一零件,其平面度能较容易地控制在0.1mm/(100mm×100mm)以内,但是会增加设备体积和质量,且设备内部发热器件向卫星平台传导热量的路径较长,热阻较大。
某大功耗星载电子设备由5个功能模块组成,其本体尺寸为320mm×175mm×238mm,总质量约18kg,总热耗约120W。利用Flotherm工具软件建立基于传统结构构型的热分析模型,通过数字仿真计算,获得了其在真空、微重力环境下设备内部发热器件的温度水平,发现部分器件的结温不满足I级降额的要求。为了降低发热器件的温度水平,缩短发热器件的传热路径,取消公用底板,使各功能模块的机壳直接与平台接触,其构型如图 2所示。

图2 某大功耗星载模块化电子设备改进构型
通过仿真计算可知,改进构型后的设备内部器件的温度水平得到了控制,满足了I级降额的要求。但与传统构型相比,设备的安装面由单一零件构成变成了由5个零件构成,如何保证拼接后安装面的平面度满足不大于0.1mm/(100mm×100mm)的要求成为急需解决的难题。
2 平面度分析计算
由于该电子设备为模块化组合拼接式构型,各单元间接触面与各自安装底面的垂直度将影响单机拼装后的平面度。为满足设备平面度要求,需要对各单元安装底面的平面度及各单元间接触面与安装底面的垂直度进行设计计算。根据垂直度及平面度的定义,对于两个有垂直度要求的平面而言,最极端的情况为垂直面相对于基准面有同一个方向的偏移,且随着垂直面上的点与基准面的距离越远其偏移量越大,即形成如图 3所示的一个角度偏移。

图3 垂直度极端情况说明
图中:H为模块高度,L为模块厚度,A为底面基准,B为侧面基准,c为设计垂直度值,d为设计底面平面度值,α为侧面偏移角。α计算公式为:
α=arctan(c/H)≈c/H
(1)
若设备由n个模块拼接而成,当以倾斜面为接触面时,安装面平面度变化最极端的情况如图4所示。
此时,设备的底面平面度即为图中坐标点P2,P3到线段P1P4的距离DP2,DP3中的最大值。若以坐标点P2为坐标原点,则各坐标点的坐标值如下:

图4 拼装结构极端平面度情况说明
(2)
(3)
(4)
(5)
式中:Lj为第j个模块的厚度;βj为第j个模块的相对倾斜角度。根据三角形内角和定理可得:
βj=βj-1+2α=2|j-m|α
(6)
其中m的取值满足:
(7)
由于角度βj较小,因此m的取值可近似为满足:
(8)
设线段P1P4的方程为y=kx+b,其中:
(9)
(10)
点P2到线段P1P4的距离为:
(11)
点P3到线段P1P4的距离为:
(12)
此时的设备底面的实际平面度值dS与设计平面度值d的关系为:
dS=d+max(DP2,DP3)
(13)
对于该星载设备而言,L1=60mm,L2=22mm,L3=38mm,L4=35mm,L5=50mm,H=238mm,n=5,则m=3,β1=β5=4α,β2=β4=2α,于是:
(14)
b=[(L3+L4+L5)(4αL1+2αL2)+(L1+L2)(2αL4+4αL5)]/(L1+L2+L3+L4+L5)=278.4α
(15)
由于k>0,b>0,根据式(11)、(12)可知,DP3>DP2。因此为满足平面度指标dS≤0.1mm的要求,即有:
(16)
根据加工设备情况,取设计平面度值d=0.04mm,则α≤2.14×10-4(°),于是设计垂直度值c=αH≤0.051mm。在实际工程中,将设计平面度值d和设计垂直度值c均取值为0.04mm,此时实际的平面度值约为0.087mm。由于设备的长度和宽度均大于100 mm,当最大偏差点没有位于同一个100mm×100mm区域时,实际的检验平面度值会低于0.087mm,满足不大于0.1mm/(100mm×100mm)的指标要求。
3 装配过程控制
由于该设备采用模块化拼装构型,5个功能模块仅通过6颗螺栓串接固定,且其中有4个模块采用的是通孔结构,虽然各模块间均采用了镶嵌结构来限制模块在竖直方向上的位移,但仍不能完全定位,因此设计了如图 5所示的简易夹具,同时配合平面度为0.02 mm/(400mm×400mm)的高平面度安装平台来减小模块在装配过程中发生的竖向移动。
夹具固定在安装平台上,由4根立柱和4根横梁作为固定支撑,根据设备模块数量配置相同数量的可移动横梁,在每个可移动横梁上配置3个压条,压条可以在横梁上移动,且高度可调,压条的头部采用聚四氟乙烯材料,以保证在压紧模块时不会破坏设备表面的镀层。装配时,先利用设备上的6颗螺栓预紧,再调整压条的位置,分别压在各个模块的两端和中部,然后再将螺栓拧紧,最后去掉工装。
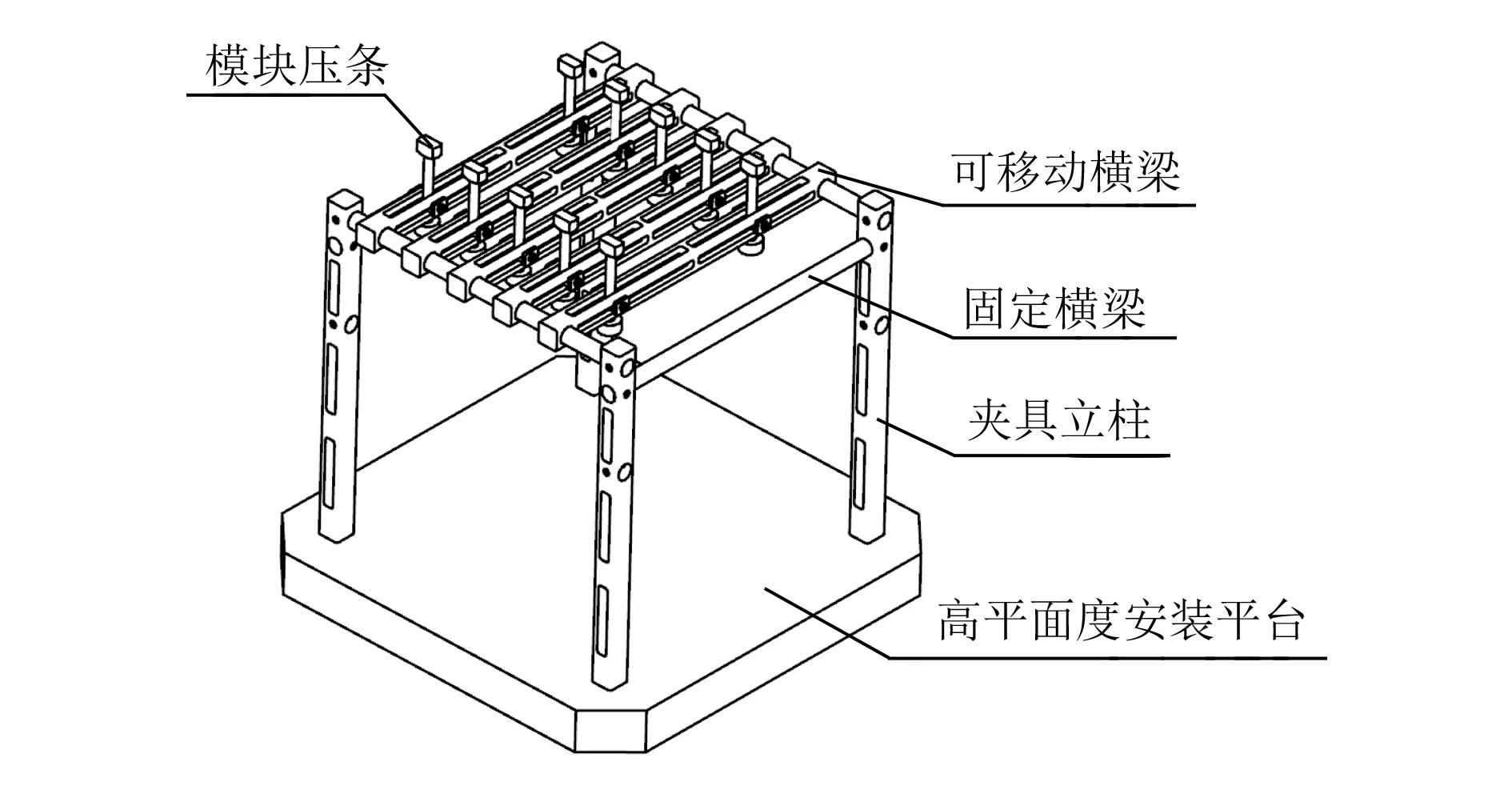
图5 装配工装示意图
4 实物验证
为了验证上述方法的可行性,按照上述设计和过程控制方法进行了星载电子设备实物研制加工,并利用三坐标测量机对安装面平面度进行测量。三坐标测量机因其具有测量柔性和精确性被广泛应用于表面三维坐标数据的测量[4-5]。将被测设备放置在三坐标测量机的测量工作台上,并使设备的长边与测量机的Y轴平行,然后对平面度进行测量。测量中共测24个点的数据,测点覆盖整个安装底面,且在每个模块上均匀分布。测量的布点情况如图 6所示,测量结果见表 1。

图6 测点分布示意图
表中的I,J,K方向为三坐标测量机给出的测点处的法向分量,偏差为三坐标测量机数据处理后得到的该测点处相对于基准平面的偏差。由表可知:最大正偏差为0.029mm,出现在测点5;最大负偏差为-0.064mm,出现在测点2。于是可以得到该设备底面的平面度最大值为0.093 mm,法向矢量(-0.000 44,0.000 09,1.000 00),此外根据测点2和测点5的坐标值,结合图 7所示的临近网格区域示意图,可知两点不属于同一个100 mm×100 mm网格区域,由此可见,该设备的底面平面度满足0.1 mm/(100mm×100mm)的要求。

表1 三坐标测量机测量的星载电子设备底面平面度数据 mm
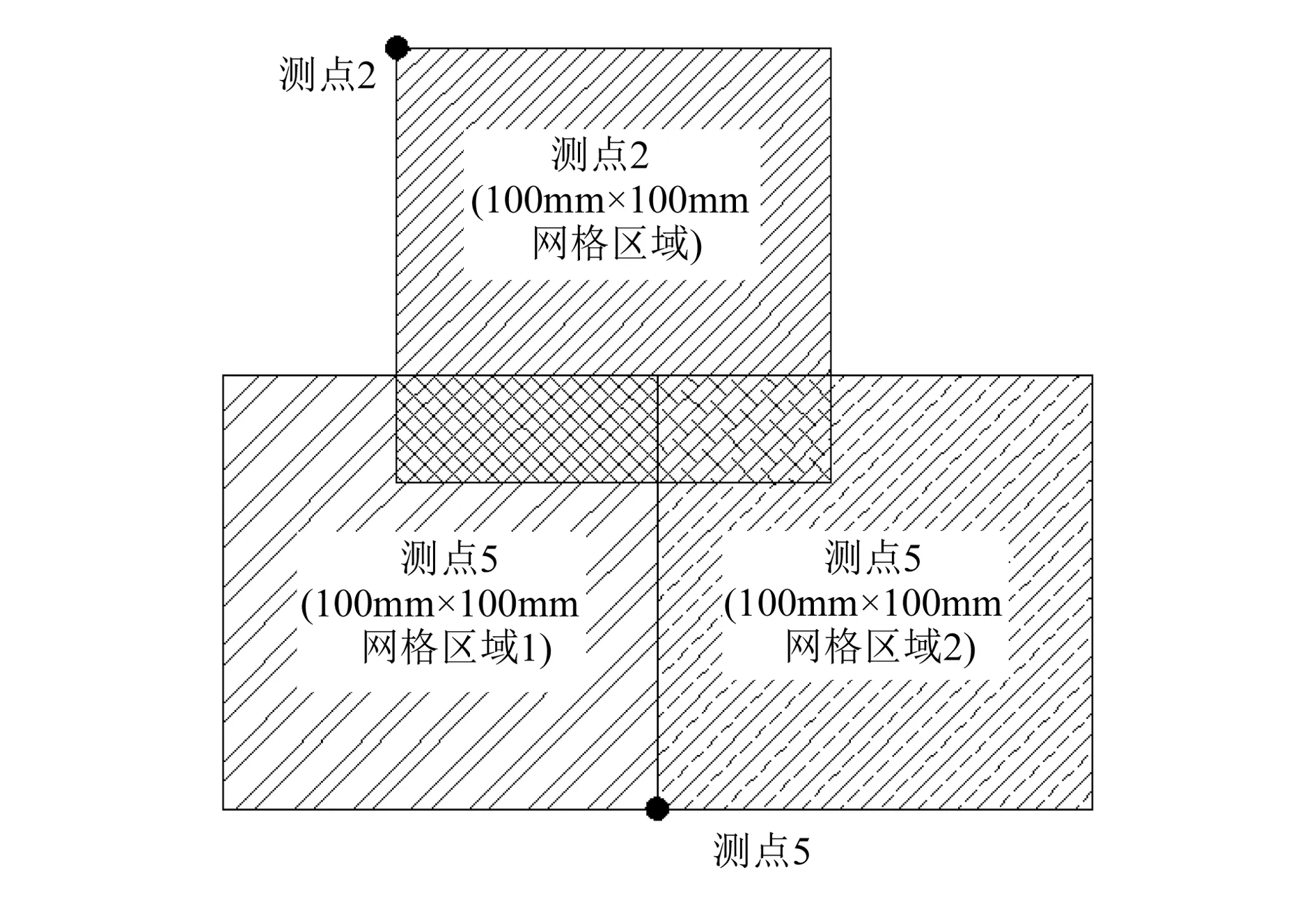
图7 测点2与测点5相近的100mm×100mm网格区域示意图
5 结束语
星载电子设备安装面的平面度对其传热性能的影响较大,应该在初样电性件研制阶段就对平面度的相关影响因素进行充分全面的分析,对各因素分配合理的控制指标,并制定相应的控制措施,在设计、生产加工、装配调试等过程中进行严格的控制。本文所提及的控制设计方法可以为保证模块化电子设备的平面度提供借鉴。
参考文献:
[1] 侯增祺,胡金刚. 航天器热控制技术:原理及应用[M].北京:中国科技出版社,2008.
[2] 何菊. 某星载电子设备结构设计简述[J].中国科技信息,2010(5):45-46,54.
[3] 刘波. 某星载电子设备构型设计[J].中国科技信息,2017(13):83-84,86.
[4] 费兰,杜世昌. 面向零件平面度误差估计的空间泛克里金插值建模[J].机械工程学报,2014,50(15):127-135.
[5] 王宇,黄富贵,李兴旺. 平面度误差统计特征实验[J].华侨大学学报,2014,35(5):487-491.
猜你喜欢
振动与冲击(2022年19期)2022-10-17
交通科技与管理(2022年19期)2022-10-12
山东冶金(2022年4期)2022-09-14
军民两用技术与产品(2022年6期)2022-08-06
内燃机与配件(2022年2期)2022-01-17
绿色科技(2021年5期)2021-04-08
制造技术与机床(2019年6期)2019-06-25
新商务周刊(2017年6期)2017-12-27
中国设备工程(2017年10期)2017-01-20
科技传播(2016年17期)2016-10-10
