
凸组合实时判决反馈稀疏水声信道盲均衡算法
2018-06-06 09:25董玉华大连民族大学信息与通信工程学院辽宁大连116605
大连民族大学学报 2018年3期
肖 瑛,董玉华(大连民族大学 信息与通信工程学院,辽宁 大连 116605)
由于声波在水介质中传播的特殊性,目前单载波自适应均衡仍然是水声通信接收端消除码间干扰的主要技术手段[1]。随着海洋资源开发以及军事发展需求,水声通信正向着高速高质量需求方向发展,高速水声通信条件下,水声信道呈现典型的稀疏特性[2]。对于稀疏水声信道而言,冲激响应由较短的前达响应和很长的后达响应(拖尾)组成[3]。在高速水声通信系统中,后达响应表现为时延扩展很长,可达数百个码元,但是仅有很少的系数携带重要能量,其他大部分权系数为零,这使得具备稀疏特性的多径水声信道的码间干扰较之一般水声信道不同。稀疏水声信道产生的码间干扰主要由其时延可达数百个码元的拖尾响应引起,已经证明线性均衡器长度需要达到信道长度的4倍以上才能逼近理想均衡条件[4],因此对于稀疏水声信道线性均衡器要设置足够长度来获得理想的均衡性能。而自适应均衡算法计算量与均衡器长度成正比,这直接导致计算复杂度增加。即使采用判决反馈均衡器,其前馈滤波器不需要接近信道的逆,但是研究表明判决反馈均衡器的前馈滤波器长度至少等于信道的长度时,才能获得较为理想的均衡结果[5],对于稀疏水声信道的均衡来说,计算复杂度仍然非常大。
为降低稀疏水声信道均衡的计算复杂度,稀疏化成为一种有效方法[6]。对于传统自适应均衡技术可利用训练序列得到信道响应的预先估计,从而在训练过程中对均衡器进行稀疏化处理,实验证明稀疏自适应均衡算法可以降低75%-90%的计算量,但是定期发送训练序列必将占有有限水声通信带宽,降低通信效率[7]。对于盲自适应均衡技术,信道响应的预先估计成为难题,从而导致均衡器稀疏化处理变得困难[8]。已有文献报道的稀疏水声信道盲均衡算法,均是传统自适应均衡技术稀疏化方法的推广,即均衡器在全阶更新一段时间后,设定能量阈值对均衡器进行稀疏化处理[9]。然而对于稀疏水声信道盲均衡算法,稀疏处理后置零的均衡器权系数将在后续迭代过程中无法重启,即不再参与更新计算,这使得算法仅能适用于固定冲激响应的水声信道条件,当信道具有时变特征时,此类稀疏水声信道盲均衡算法性能将严重下降,甚至失效。为此,文中提出了一种凸组合实时判决反馈稀疏水声信道盲均衡算法,盲均衡器分为保持均衡器支路和稀疏均衡器支路,利用保持均衡器能量和权系数的瞬时梯度作为判据,对稀疏均衡器支路对应抽头进行实时稀疏化处理。算法中避免设置稀疏化阈值,对不同稀疏水声信道和通信信号具有通用性,且对于时变稀疏水声信道可以利用保持均衡器支路恢复稀疏均衡器支路置零抽头系数,使算法对信道具有较强跟踪能力。最后利用典型稀疏水声信道对文中提出算法进行了仿真验证。
1 判决反馈盲均衡算法
判决反馈均衡器为一种典型的非线性均衡器,利用反馈滤波器来抵偿信道的非线性特性,从而消除前馈滤波器的剩余码间干扰。判决反馈均衡器性能优于线性横向均衡器,可以补偿幅度失真,具有最小的噪声增益,能够完全均衡不超过其长度的信道。利用判决反馈均衡器结构,前向滤波器不需近似于信道的逆,避免了增强噪声,反馈滤波器用于去除由先前已检测符号引起的符号间干扰。判决反馈均衡器的基本思想是:一旦检测出某个信息符号,由该符号引起的符号间干扰就被估计出来并被预先减去[10],其基本结构如图1。
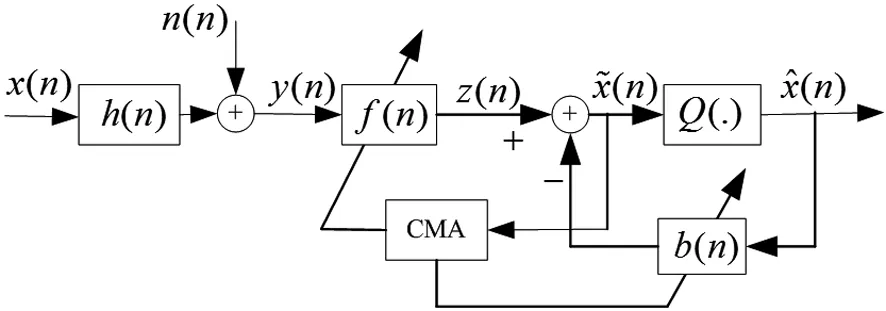
图1 判决反馈CMA盲均衡示意图

(1)

(2)

(3)
(4)
则判决反馈均衡器的输出为
(5)
根据CMA盲均衡代价函数,判决反馈均衡器更新公式为[12]
f(n)=f(n-1)+μfe(n)y*(n),
(6)
(7)
其中误差函数按下式计算:
(8)
由于在判决反馈均衡器中,前馈滤波器不需要构成信道的逆信道,即不需要利用前馈滤波器达到理想均衡条件,因此,前馈滤波器的长度仅达到非零有效长度即可,而反馈滤波器长度大于等于信道长度加判决延迟即可。这样利用判决反馈均衡器对稀疏水声信道进行均衡,可以有效降低计算复杂度,并利用反馈滤波器抵消前馈滤波器产生的剩余码间干扰,获得较优的均衡性能。
2 凸组合判决反馈盲均衡算法
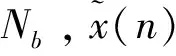
均衡器权稀疏化算法在稀疏水声信道盲均衡中可以有效降低算法计算复杂度,并在一定程度上提高算法的收敛性能。常用的稀疏化方法依据均衡器抽头系数能量与预先设定的阈值进行比较,小于设定阈值的均衡器抽头系数置零完成稀疏化处理。但是,稀疏化阈值的设置对算法性能影响很大,而且阈值的设置只能依赖人工经验,到目前为止没有统一合理的设置方法。当稀疏化阈值设置过小时,均衡器权系数几乎得不到稀疏化处理,算法直接退化为全阶均衡算法,当稀疏化阈值设置过大时,有效的均衡器权系数可能会被稀疏化掉,导致均衡性能下降,甚至算法发散。为此提出一种凸组合实时判决反馈稀疏水声信道盲均衡算法,盲均衡器结构如图2。其中f1(n)和b1(n)构成稀疏均衡器支路,而f2(n)和b2(n)构成保持均衡器支路,图2中的双箭头虚线表示在一定条件下,保持均衡器支路和稀疏均衡器支路在一定条件下进行交互。这样整个盲均衡器结构上由两个独立的判决反馈均衡器构成,对于稀疏均衡器支路和保持均衡器支路的输出为
(9)
(10)
而两路均衡器的更新规则以及误差函数的计算可以分别依据式(6)-(7)和式(8)进行。
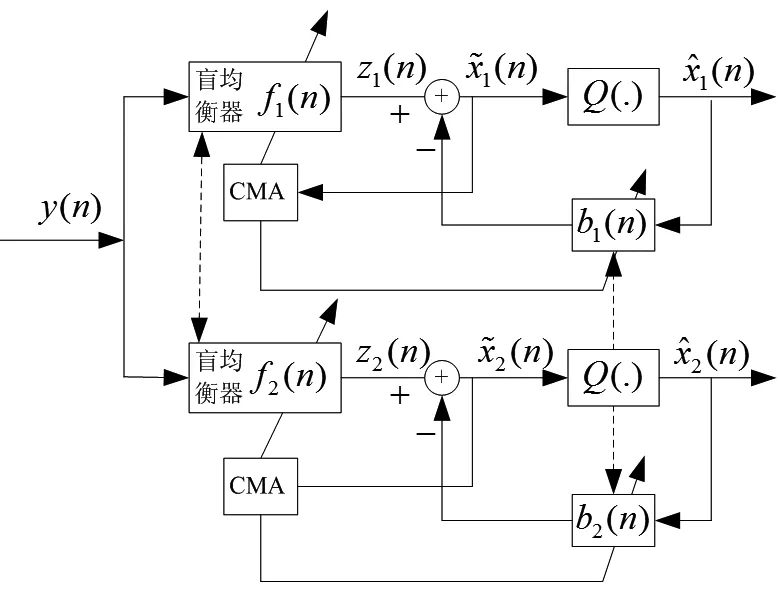
图2 凸组合判决反馈盲均衡器结构
定义判决反馈均衡器中前馈滤波器和反馈滤波器的权系数能量分别为
(11)
(12)
根据保持均衡器支路,定义前馈滤波器和反馈滤波器的瞬时梯度分别为
(13)
(14)
传统的稀疏化方法一般是在算法迭代到一定次数后,计算均衡器各个抽头系数的能量,并将其与给定的阈值进行比较,一旦某抽头系数的能量小于阈值,则将其置零实现稀疏化处理[13]。这类稀疏化方法的不确定性因素太多,导致算法性能在不同水声通信条件下不稳定,同时在迭代一定次数后进行稀疏化处理的方式,不仅在降低计算复杂度上不利,同时对于未稀疏化处理的迭代过程中,算法性能与全阶均衡算法一致,不能有效提高算法的收敛性能,也不利于对时变稀疏水声信道的实时跟踪。这里根据均衡器权系数能量和瞬时梯度,结合凸组合判决反馈盲均衡器给出一种实时稀疏化方法。根据稀疏水声信道信号传输特点,均衡器抽头系数是否具有显著能量结合抽头系数能量和当前瞬时梯度共同判别,即当前抽头系数能量小于某一阈值,并且对应的瞬时梯度要足够小,才能判别该抽头系数应被稀疏化处理。定义均衡器中某一抽头系数能量为
(15)
(16)
定义均衡器某一抽头系数的瞬时梯度为
ΔJf2(T)=|e2(n)y*(T)|,
(17)
(18)
当在盲均衡器完成一次迭代后,判断Ef(T)、Eb(K)与Ef、Eb之间的关系,以及ΔJf(T)、ΔJb(k)与ΔJf2(n)、ΔJb2(n)之间的关系,来共同确定需要稀疏处理的均衡器抽头系数,稀疏化方法如
(19)
(20)
即对于保持均衡器支路而言,其前馈滤波器某一抽头系数在某次迭代后,其能量值小于均衡器权系数能量的1/3,并且其对应的更新瞬时梯度小于均衡器总瞬时梯度的1/3时,则稀疏均衡器支路对应的抽头系数置零实现稀疏化处理。对于反馈滤波器的稀疏化方法与前馈滤波器一致。这样,保持均衡器支路一直采用全阶更新算法,而稀疏均衡器支路在更新过程中实时被稀疏化处理。虽然1/3这个比例数值是经过大量仿真验证的经验结果,但是有效避免了阈值设定问题,并且该比例值不受信道、发送信号类型以及噪声的限制,具有一定的通用性。
如果在整个数据传输过程中,一直采用并联稀疏化处理方法,在稀疏水声信道条件下将会增加额外的计算复杂度,事实上经过一定步数的迭代,稀疏均衡器就可以实现理想的稀疏化结果。这里以稀疏均衡器支路进入稳态作为判据来决定保持均衡器支路是否再参与更新,稀疏均衡器支路进入稳态以输出误差功率来判定。当稀疏信道由于时变产生了性能下降,利用输出误差功率的瞬时变化率作为判据来恢复保持均衡器参与更新,以实现稀疏化方法在时变信道中的稳定性。输出误差功率的估计采用指数滑动窗估计方法如:

(21)

3 计算机仿真与分析
仿真中采用典型的两径稀疏水声信道模型,信道传递函数为
H(z)=1+0.4z-21。
(22)
发送信号为等概率二进制序列,采用QPSK调制方式。前馈滤波器长度为25,中心抽头系数初始化为1,其余抽头系数初始化为0,反馈滤波器长度为23,全0初始化。学习步长μ=0.0015。信道噪声为加性高斯白噪声,信噪比SNR=20dB。输出误差功率估计遗忘因子,λ=0.99。500次蒙特卡洛仿真结果如图3,凸组合实时判决反馈稀疏盲均衡器的输出误差功率曲线如图4。
图3 剩余码间干扰收敛曲线
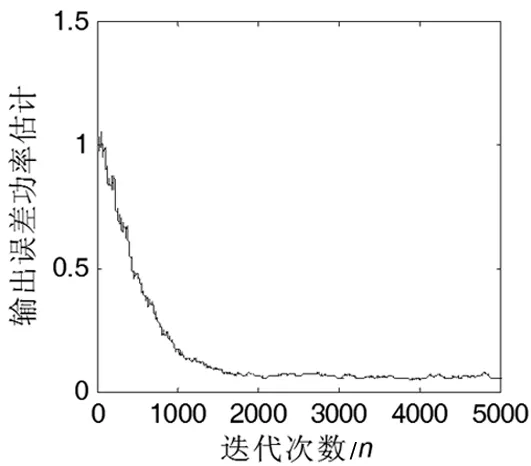
图4 输出误差功率估计曲线
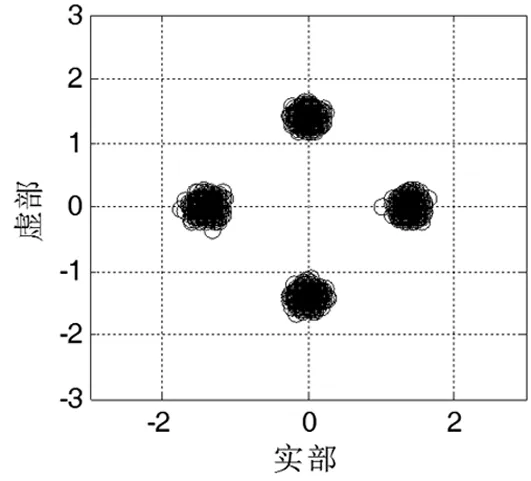
图5 全阶DFE-CMA均衡输出星座图

图6 稀疏DFE-CMA均衡输出星座图
从仿真结果图3中可以看出,凸组合实时判决反馈稀疏盲均衡(Sparse-DFE-CMA)与全阶判决反馈盲均衡(Full-DFE-CMA)相比,收敛后稳态剩余误差下降约5dB,有效提高了均衡性能。由图3和图4可知,当输出误差功率σ(n)下降到1/3时,即1500次迭代后,均衡器基本进入了稳态状态,此时,保持均衡器支路停止更新,而稀疏均衡器支路中,前馈滤波器剩余12个有效抽头系数,反馈滤波器剩余11个有效抽头系数,算法在1500次迭代后,计算复杂度远小于全阶判决反馈盲均衡算法。图5和图6分别给出了Full-DFE-CMA和Sparse-DFE-CMA均衡后输出的星座图,可以看出,Sparse-DFE-CMA均衡后星座图聚敛性要优于Full-DFE-CMA。
4 结 语
文中以稀疏水声信道盲均衡为研究对象,在对现有稀疏盲均衡算法分析的基础上,提出了一种凸组合实时判决反馈稀疏盲均衡算法。算法以保持均衡器支路结合抽头系数能量判别的方式,实现对稀疏均衡器支路的稀疏化处理,算法无需设置稀疏阈值,具有通用性,且保持均衡器支路的引入在时变稀疏水声信道条件下可以有效避免算法失效。虽然保持均衡器支路在算法起始阶段额外增加了计算复杂度,但是对于长时水声通信而言,增加的计算复杂度仅局限在一定迭代次数范围内,而稀疏均衡器支路的计算复杂度相比全阶判决反馈盲均衡器显著降低。仿真结果证明了算法的有效性。
参考文献:
[1] 孙丽君, 孙超. 一种用于水声信道的稀疏权超指数迭代盲均衡算法研究[J]. 电子与信息学报, 2005, 27(8): 1205-1207.
[2] 张艳萍, 赵俊渭, 李金明. 稀疏水声信道判决反馈盲均衡算法研究[J]. 电子与信息学报, 2006, 28(6): 1009-1012.
[3] 郭业才, 郭福东, 丁雪杰. 基于正交小波变换的稀疏权盲均衡算法[J]. 数据采集与处理, 2010, 25(5): 569-574.
[4] 田营, 葛临东, 王彬,等. 一种改进的稀疏多径信道盲辨识[J]. 信号处理, 2011, 27(7): 1009-1015.
[5] 罗亚松, 胡洪宁. 基于移动抽头机制的判决反馈盲均衡算法研究[J]. 仪器仪表学报, 2015, 36(1): 63-69.
[6] 周跃海, 曹秀玲, 陈东升,等. 长时延扩展水声信道的联合稀疏恢复估计[J]. 通信学报, 2016, 37(2): 165-172.
[7] 张婷, 王彬, 刘世刚. 基于Hammerstein模型的非线性信道广义线性盲均衡算法[J]. 电子学报, 2015, 43(9): 1723-1731.
[8] HWANG K, CHOI S. Blind equalizer for constant modulus signals based on Gaussian process regression [J]. Signal Processing, 2012, 92(6): 1397-1403.
[9] 郭业才, 林仁刚. 基于T/4分数间隔的判决反馈盲均衡算法研究[J]. 数据采集与处理, 2008, 23(3): 284-287.
[10] GOUPIL A, PALICOT J. An efficient blind decision feedback equalizer [J]. IEEE Communications Letters, 2010, 14(5) : 462-464.
[11] 宁小玲, 刘忠, 罗亚松,等. 一种改进的水声信道载波恢复盲均衡算法[J]. 西安电子科技大学学报, 2012, 39(1): 151-156.
[12] XIAO Y, YIN F L. Blind equalization based on RLS algorithm using adaptive forgetting factor for underwater acoustic channel [J]. China Ocean Engineering, 2014, 28(3): 401-408.
[13] 杨源, 李明阳, 王徐华. 一种改进的稀疏多径信道均衡方法[J]. 西安电子科技大学学报, 2014, 41(1): 158-163.
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
电信科学(2016年9期)2016-06-15
电测与仪表(2016年13期)2016-04-11
电子器件(2015年5期)2015-12-29
电源技术(2015年1期)2015-08-22
电工技术学报(2014年7期)2014-11-15
声学技术(2014年1期)2014-06-21
