基于人工智能的汽车车速和方向控制分析
2018-06-12 08:58纪明君陈新
时代汽车 2018年9期
纪明君 陈新
北京汽车研究总院 北京市 101300
1 引言
近些年的通信、新能源和传感器技术的快速发展,专业工作人员已将这些技术吸收到汽车行业,为汽车的发展形势带来了革新。如在产品形态和汽车产业的变革方向,未来的发展方向更加趋向于清洁能源和智能化,汽车已不仅仅是交通工具,还有一些智能终端和处理单元的作用,个性化更加明显[1]。产业格局的发展和生态化方向的发展,用户体验也已成为汽车消费的多元化方向之一,加快汽车产业和各种先进的技术进行融合也是未来的发展方向之一,如当今最炙手可热的人工智能技术,重塑当今汽车行业发展的新格局[2]。
汽车智能化是未来最重要的发展方向之一,其中的自动驾驶技术就是未来汽车产业的最主要目标,所带来的优势将会是交通安全、消除拥堵,提升效率都具有举足轻重的作用效果。结合当前的深度学习技术和机器视觉技术,都为智能汽车的成果应用提供了技术支撑。本系统在智能决策规划的基础上对车辆的速度和方向控制进行了研究分析。构建基于AI的自动驾驶架构,构建车速和方向控制策略,并梳理汽车智能化发展的关键技术和发展趋势[3]。
2 自动驾驶技术的发展和AI应用现状研究
2.1 自动驾驶技术的发展现状
汽车产业链的发展中,自动驾驶汽车将会是主要发展对象,这个作为机电一体化和高度集成的汽车系统将会是替代人类的最有效设备,所组成的复杂融合系统将会包含感知和独立的决策能力,集成了多个传感器的系统将会具有数据关联能力,同时在车辆坐标系下进行元数据的融合,目前自动驾驶技术主要有两个发展方向,为自动驾驶的决策规划服务,在自动驾驶的潮流下,车速控制和方向控制已成为自动驾驶的瓶颈,本文将主要针对车速和方向控制进行研究[4]。
渐进式发展,为了提高自动驾驶汽车的智能化水平,在研究的不同阶段分别不同形式的驾驶选择,如辅助式驾驶阶段,进行辅助式驾驶,依据驾驶员的指令为主,系统只是起到辅助性的作用;同时还具有全自动驾驶和部分自动驾驶阶段。颠覆式发展,在不考虑循序渐进的驾驶思路情况下,完全依照技术实现车辆的全自动驾驶,这种方法的难道最大,目前情况下,美国在这个方面取得了不错的成就,如美国国防部所提出了一系列项目ALV项目、DEMOII计划等。
2.2 自动驾驶技术的应用现状和挑战
随着科学技术的发展,目前所具有的代表性的技术如人工智能技术和机器视觉等,都在一定程度上证明了技术的开拓性,在此将AI技术和MV技术引入到车辆的自动驾驶中来,实现车辆的环境感知,获取环境信息实现决策和执行器的处理。在车辆的驾驶全过程中,传感器和执行器的大规模使用都需要大量的数据计算和算法的逻辑推导,同时在发展中还面临一系列的挑战:(1)自动驾驶的全生命周期中,信息的实时更新所导致数据量的冗余,这些都对计算能力提出了考验;(2)部件小型化的产业化需求使目前系统庞大的硬件尺寸面临挑战,不满足车规级部件需求。自动驾驶方向控制的目标就是通过控制转向角度的实际参数和期望参数的偏差来衡量;车速的自动控制就是一车速偏差量最小为控制目标,将实际速度与期望速度的偏差值控制在最小范围。
所面临的挑战也恰恰说明了自动驾驶汽车技术所面临的不足之处,根据这些挑战,大幅度的提高车辆的数据记录能力和计算能力,再实时环境下的自适应能力和选择性能力也都将面临挑战。为解决这些难题和挑战,将AI技术和车载的集成化应用,构建基于大数据环境下的云协同驾驶,为智能驾驶提高技术上的保障。根据云计算和大数据技术的发展,提出车云协同自动驾驶系统架构。为子系统提供可靠的数据存储能力,对数据的传输和共享提供分享平台,同时还有具有一定的自主学习能力,通过自主学习来不断提供处理问题的能力和可适应性。硬件环境通用不可或缺,通过软件技术的提高在一定程度上解放硬件的能力,降低智能汽车的总体成本。
3 基于AI的自动驾驶系统架构和关键技术
基于AI的车云协同自动驾驶系统架构方案主要包含数据的获取、数据的计算和逻辑性的推导,面向辅复杂的行车环境,硬件和软件的协同架构具有重要意义,如下所示:
图1所示架构方案,主要由几个子系统组成:嵌入式应用终端设计、云系统AI集成就似乎、信息加护平台构建和大数据云处理系统等,这些构成了对辅助环境的精确感知和当前环境的决策。
3.1 自动驾驶AI终端硬件架构
作为基于AI的车云协同自动驾驶系统架构方案的子系统,自动驾驶硬件终端具有传感器感知、路线决策规划和执行器控制等能力,这是一个集成化的智能习题,根据现有的驾驶环境感知外部环境的变化,主动生产规划决策,对不同任务和工作状况实现协同化的控制,其中的CPU和MCU结构构成了大数据环境下的高速网络处理能力。

图1 基于AI的车云协同自动驾驶系统架构方案示意图
3.2 自动驾驶AI终端软件架构
作为基于AI的车云协同自动驾驶系统架构方案终端软件子系统,其具有的执行控制和信号检测等能力,所具有的执行器单元包括计算、控制和传感器阵列等,通过软件的模块化设计将智能驾驶的感知和规划能力集成在一起,确保合理有效的分配和调度,有效的使用系统所具有的的模块化资源和计算能力,优先执行最新计算结果,并具有后续的半自动修复功能。

图2 自动驾驶路径模型
4 自动驾驶策略研究
自动驾驶方向控制的目标是通过自动控制实现工作过程中实际方向和期望方向的偏差最小化,为此本文提出了一种以侧向位置和偏角的控制方法。为了达到有效的控制,需要在智能汽车中预置方向控制器,预置的方向控制器将车辆的感知、决策和执行能力通过当前形成环境进行动态调整,根据车速调整方向输入信息实现轨迹校正。根据车辆运行过程中的轨迹识别获得转向角度的所需值,构建如下的转向增益:

式中:R是角速度值,β为转角,L1轴距值,W1为车辆稳定性值。
图2所示为自动驾驶路径模型,其中0XY为相对坐标系,为外部环境坐标,0X01Y01为车辆动态行驶坐标系,汽车行驶过程中的两个位置分别为(X1,Y1),(XN,YN),摆角为θ,车辆前进预留距离为L,运行轨迹与坐标轴的切线坐标为(X01,Y01),(X0N,Y0N)。
自动驾驶的本质就是通过各个执行器实现在无人状态下的车辆控制,因为此过程是一个高度复杂的系统,参数的变化具有非线性关系,难以准确的衡量。系统的智能决策规划模块通过基于人工智能的决策以及基于A*算法的路径规划模块得到车辆行驶的实时局部路径规划,在此基础上得到车辆在横纵向运动中的偏差值,输出给控制模块。基于人工智能的决策规划模块在实际道路使用过程中,可能会遇到没有在训练中覆盖到的场景,在这种情况下,决策规划模块的输出就会违反常理,做出影响驾驶安全的控制策略,这个时候就需要在控制执行前加上安全分析的功能,例如在高速的情况下转弯角度过大就需要立即纠正并报警。控制模块所用的PID控制器再增加3个参数对其进行修正,利用角度偏差、位置偏差和角速度得到目标值。如下图所示的控制方案图所示,车速偏差表达的为所期望得到的车速和实际行驶过程中的车速差值,车速控制器所要实现的目标就是将车速差值控制在尽量小的数值,本文采用的是PID控制单元实现车速增减变化控制,控制器将增益调度值和稳态转向的函数相乘,计算得到反馈角度和位置偏差的反馈量。
人工智能决策不同于传统的决策支持系统(DSS),传统的决策主要是对结构化和半结构化决策问题的支持,采用人机对话手段对决策模型的分析,并不能满足本文的复杂模型,在此提出了人工智能决策支持系统(IDSS),利用人工智能和特有的专家系统分析定性的问题和不确定性的推理,为解决上述问题提供了新的途径,如上述流程图3所示,在实现车速控制之前添加智能决策规划,实现系统的监控和撞见检测,最终在判断环节再次对智能决策规划的结果进行分析处理,无疑会大大提高决策的支持能力。
IDSS实现的关键技术是智能化模型的建立、系统体系构建和知识处理技术等,但是知识管理在其中无疑是核心技术,因为决策系统的决策能力很大程度上取决于知识系统。对于模型建立中所需要的数据、方法和模型信息要进行结构化和半结构化的处理并存储在知识库中,无论是事实、规则还是经验都需要实现统一化的知识管理。车速和油门以及制动踏板具有重要的控制输入关系,控制关系如下式所示:

式中表示的为车速偏差,E为车辆当前位置的侧向偏差或速度偏差。车速偏差定义为期望值与实际值的偏差,采用PID控制执行单元的控制实现车速的增减控制,在油门和制动踏板的使用方面,得到以下控制量US。
在油门和离合的频繁切换过程中,对油门和制动器需要设置合理的切换策略,首先保证不能同时将制动器和油门同时踩下,在某一特定车速的时候保证油门和制动器不会频繁的进行切换,当为了降低车速的时候,不会踩下制动器,单一的利用油门就可以实现车速的下降。基于这些基本原理设置期望方程如下:

式中Apk为车辆切换参数,在车辆切换控制参数时分为以下三个区间:当处于Apk>As时,处于加速区间;当-As<Apk<As时,处于车速保持区间;当Apk<-As时,为减速区间,得到下图3所示的油门和制动切换流程图。
对于自动驾驶实际运行中的轨迹控制,验证该方法的合理性和有效性。在切换过程中,需要遵守以下的三个原则:(1)针对当前的油门和制动器状态进行判定,用参数进行表示,但油门踏板处于工作状态,其它两个参数Th_out=Th_in 且Br_out=0,可避免工作状态下的杂乱现象进行有效的车辆减速。(2)若当前的油门和制动器参数为零,表示的是不工作状态,输出值参数为Th_out=0,另外的输出值参数与输入值参数关系为Br_out=Br_in,表示制动踏板工作来实现车辆减速。
由上图的油门和制动切换流程图可得,油门和制动器踏板工作状态分别有Th_a和Br_a进行表示,参数值零表示都不工作状态;油门踏板和制动器踏板的输出分别用Th_out和Br_out参数进行表示,油门踏板和制动器踏板的输入分别用Th_in和Br_in进行表示。举例当控制量参数u(k)大于零时,可表示为Th_in=u(k)且Br_in=0。

图3 车速控制策略
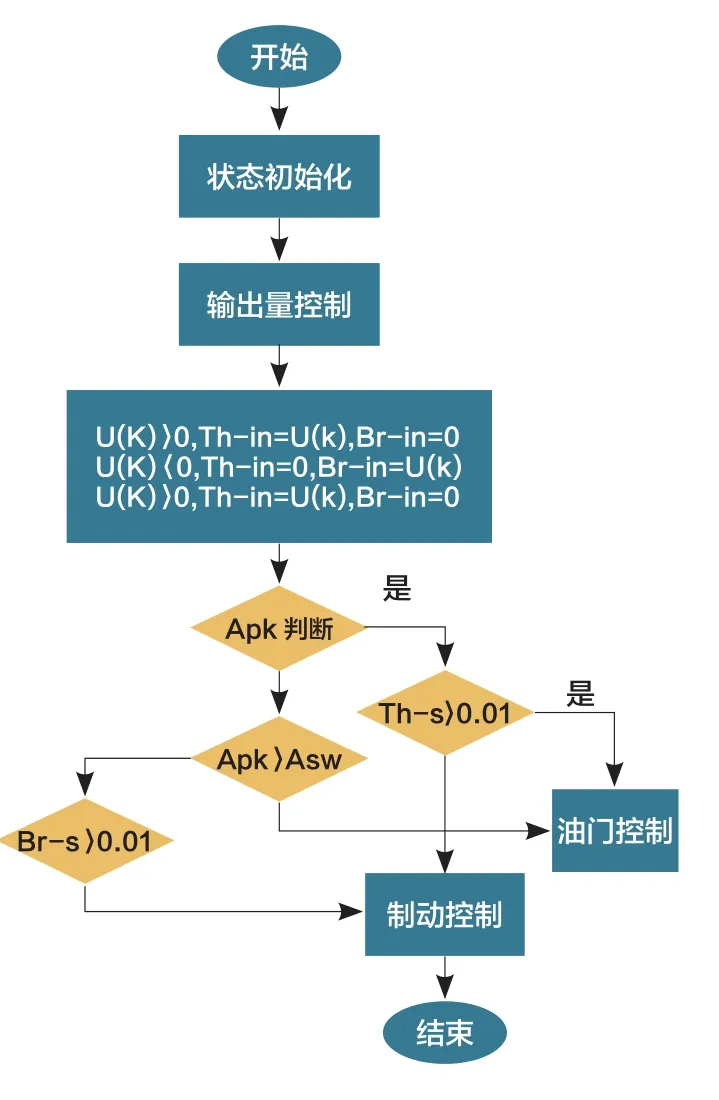
图3 车速控制策略
5 结语
本文针对基于人工智能的汽车车速和方向控制分析中所面临的挑战和困难,在现有的自动驾驶技术发展的基础上进行了大量的研究,阐述了人工智能决策规划下的汽车车速和方向控制分析方法,首先采用了适用于各种行车环境的于AI的车云协同自动驾驶系统架构方案,为了实现车速和方向的控制,引入位置偏差和偏角两个参数,在调度方面引入稳态转向增益方法,同时利用PID控制器实现良好的控制,所得结果在各种路况下均能保持较小的路径跟随偏差。在多种目标路径及目标车速下均能比较准确接近期望轨迹和目标车速,说明该自动驾驶算法是合理、有效的。
猜你喜欢
商界评论(2022年1期)2022-04-13
岷峨诗稿(2020年4期)2020-11-18
学生天地(2020年6期)2020-08-25
数学大王·趣味逻辑(2019年10期)2019-11-06
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
汽车维护与修理(2018年1期)2018-04-04
草原(2018年2期)2018-03-02
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车之友(2016年10期)2016-05-16