
磁浮式轨道振动俘能机理与试验研究
2018-06-30 06:46高鸣源
铁道学报 2018年6期
高鸣源,王 平
(西南交通大学 高速铁路线路工程教育部重点实验室,四川 成都 610031)
截至到2017年年底,全国铁路的营业里程达到12.7万km,居世界第二位;其中高铁运营里程超过2.5万km,居世界第一位,占世界高铁总里程的60%以上。随着铁路线路的延展,铁路监测设施和传感器件的需求日益增长。目前轨道监测设备都需要外部供电,供电方式有两种:有线供电和无线供电。有线供电方式采用电线电缆对监测设备进行供电,需要布设电网和电站等基础设施,耗资较大;无线供电方式采用蓄电池等移动电源,不依赖电网等基础设施,但需要定期对电池进行充电或更换,充电作业无法在现场完成,维护养护成本高[1]。低成本、少维护的新型供电方式成为未来发展的趋势。利用列车通过时轨道振动产生的能量发电,不仅可节省大量基建投资而且节能环保,具有较好的应用前景。
国内外利用振动能量进行发电的技术研究可追溯到20世纪90年代,大体可分为三类技术:静电式发电、压电式发电和电磁式发电[2-15]。静电式发电的研究最早由美国加州理工大学的学者开始,文献[2]利用驻极永极体材料可永久保持电荷的特性,结合微机电加工工艺,研制出一种微型的弹簧条支撑式可变电容器件,其电容的电极上涂覆有驻极永极体材料,伴随着外界环境的振动,电容的面积发生变化,在回路上激发出电流,产生的电流随后被收集并用来向其他器件供电。虽然静电式发电方法目前已在微振动发电领域得到较多成功应用,但是它对静电驻极体材料和工艺的要求较高[10],目前我国厂家不具备驻极体材料的生产能力,因此国内轨道振动发电领域普遍未采用静电式发电方式。
压电式发电是目前研究相对较多的发电方式。文献[16]提出一种技术方案,通过在轨下胶垫底部设置压电换能材料,将轮对-钢轨作用位移转换为电能,实现能量收集。文献[17]提出一种压电鼓式结构,置于轨枕下方,以1∶10列车轨道模型进行室内试验。压电式发电技术具有灵敏度高的优点,但由于现有压电材料的内阻较大,负载能力较弱,因此发电量偏小[18-20],难以满足轨道监测设备的供电要求,其实用化进程受到压电材料效能的制约。
电磁式发电方式可以在低频范围产生较大的功率输出,对材料无特殊需求,是一种有望在短期内进入实用化阶段的技术。现行电磁式轨道振动发电方式研究可分为共振式和机械式两种。共振式的代表性工作:文献[21]开展音圈线圈式和悬臂式发电机用于轨道能量收集的研究;文献[22]从理论上探讨列车经过时,单自由度线性谐振换能器的瞬态响应特性。机械式的代表性工作参见文献[23-25],其原理为置于轨枕之上的机械式发电装置,通过齿轮齿条等机械传动机构将轨道结构的垂向振动转变为机械结构的旋转运动,进而带动电磁式电机发电,并在室内和木枕轨道上进行试验。仅当轨道振动频率与设定的频率匹配时共振式电磁发电才能获得较高的发电效率,而实际线路上机车车辆、运行速度及轨道结构等的不同将导致轨道振动频率在较宽的频带内变化,成为制约共振式发电效率的控制性因素。机械式发电方式对振动频率无特殊要求,但是要求有较大的振动位移(文献[24]公布的试验数据振动位移为6.4~19 mm,文献[26]的振动位移为6 mm),随着我国铁路建设标准的大幅度提高,干线铁路轨道振动位移幅值明显减小(无砟轨道通常小于2 mm,有砟轨道通常小于3 mm[27]),将影响机械式发电方式的发电效率。综上,这两种电磁式发电方式对轨道振动参量的要求与轨道运行实际工作状态不符,成为它们进入实用化阶段的瓶颈。
针对现行电磁式轨道振动发电方式的不足,本文提出一种基于磁浮式换能原理的电磁式轨道振动发电技术。磁浮式换能的原理是利用悬浮磁体切割磁力线发电,悬浮磁体与静止磁体之间的电磁作用力随着磁体间距离的变化呈现非线性硬刚度特性,因此可以在宽频带内对激励产生响应;悬浮磁体的运动由电磁力约束,无需弹簧、弹条等机械元件,因此也具有灵敏度高的特点。磁浮式换能可以克服上述共振式和机械式电磁发电方式的缺点。
本文建立轨道振动-电磁耦合动力学模型(包括磁浮式换能器非线性有阻尼动力学方程),为磁浮式振动换能器的设计提供理论依据和指导;提出磁浮式振动换能器的系统设计,介绍试验研究方法和试验设置;讨论理论计算结果与试验测试结果,研究表明磁浮式振动换能系统具有非线性硬刚度特性,可在宽频带范围有效收集轨道振动能量。
1 理论模型
轨道振动-电磁耦合动力学模型的体系架构如图1所示。首先,基于轮轨耦合动力学模型计算车辆行驶载荷激励下轨道的动力响应,即计算轨道振动加速度、振动速度和振动位移的动力时程。其次,将轨道动力学计算结果作为输入,代入磁浮式振动换能器非线性有阻尼动力学方程(图1中虚线框所示方程),计算磁浮式换能器系统的动力响应。其中,磁浮式换能器的非线性刚度参数由麦克斯韦应力张量法计算,采用显式积分法求解磁悬浮振子的非线性振动微分方程,采用非线性理论中的多尺度法计算磁浮式振子的幅频响应。最后,将磁浮式换能器悬浮振子的动力响应作为输入代入麦克斯韦电动力学方程组进行求解,求得发电量。
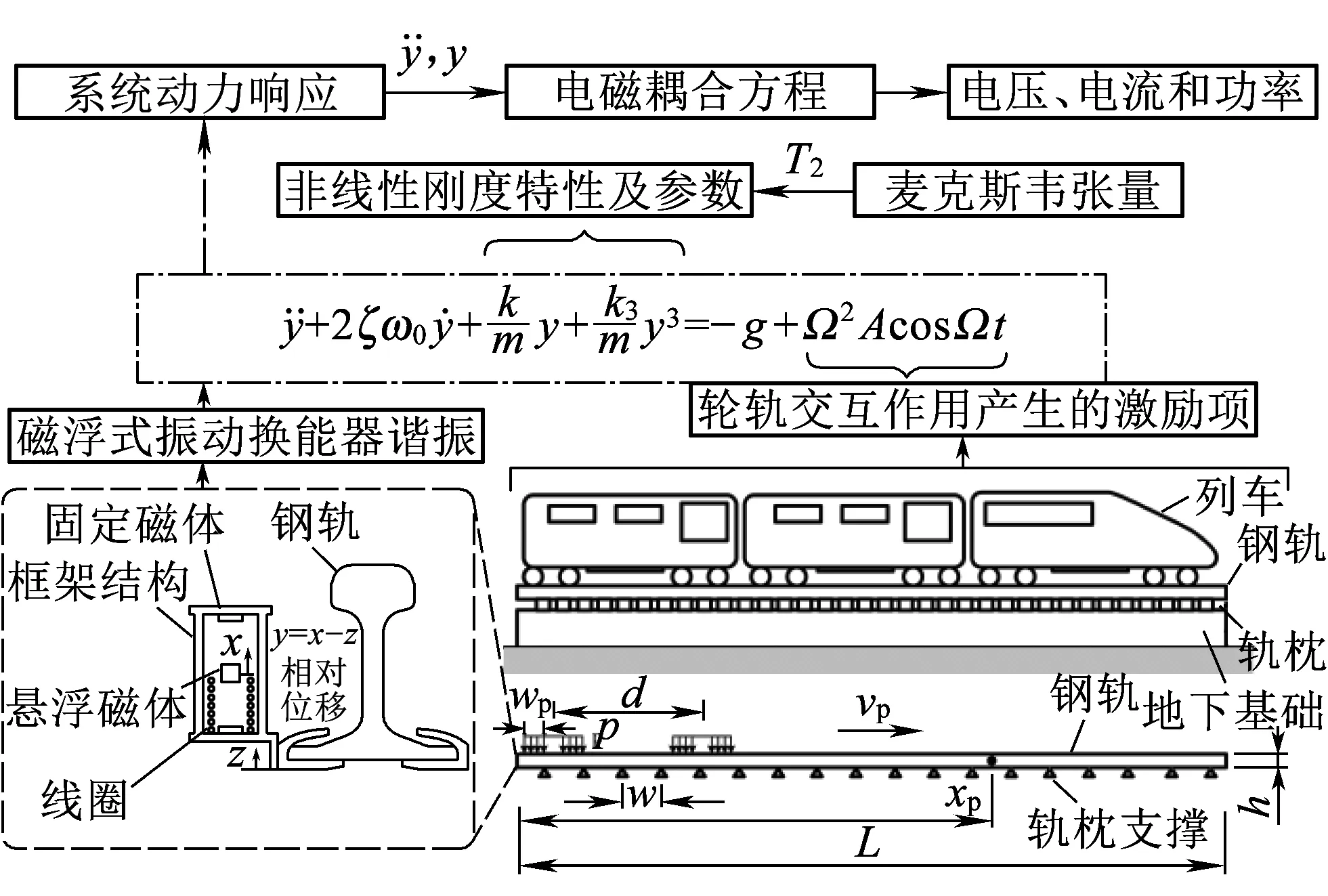
图1 轨道振动-电磁耦合动力学模型架构
利用该模型,可以计算各类机车车辆以及不同运行速度下各类轨道结构的发电能力,为磁浮式轨道振动俘能系统的设计提供理论依据。
1.1 车辆-轨道耦合动力学模型
车辆-轨道耦合动力学模型包括两个子系统,其中车辆子系统被建模为在轨道上以恒定速度移动的10自由度系统,如图2所示。轨道子结构由三层(钢轨、轨枕和道床)组成,被假设为连续弹性离散点支承上的无限长欧拉-伯努利梁。这两个子系统之间的轮轨相互作用服从赫兹非线性弹性接触理论。利用数值积分方法可计算系统的动力响应。车辆模型参数参见文献[27]中的高速模型车(HSC)模型。

图2 车辆-轨道耦合动力学模型(附有磁浮式振动换能器)
对于安装有电磁式振动换能器的铁路轨道,振动换能器刚性连接于钢轨轨底,可视为轨道的附加质量,需计算钢轨的附加质量和附加惯性矩,其几何参数如图2所示。每米钢轨振动换能器的附加质量为15 kg,轨道模型参数参见文献[27]中的长枕埋入式无砟轨道模型。
1.2 磁浮式振动换能器非线性有阻尼动力学方程
磁浮式振动换能器非线性有阻尼动力学方程为
( 1 )
式中:y=x-z为悬浮磁体质量块的相对位移,x为悬浮磁体的绝对位移,z为固定磁体的绝对位移;ζ为阻尼比;ω为系统固有频率;β为立方刚度系数;F0为悬浮磁体的重力加速度;F1为激励加速度幅值;Ω为激励频率;t为时间变量。其中ζ、ω、β、F0、F1可以由式( 2 )~式( 6 )得到。
( 2 )
( 3 )
( 4 )
F0=g
( 5 )
F1=Ω2A
( 6 )
式中:c为系统的阻尼系数;k为系统线性刚度;k3为系统非线性刚度;m为悬浮磁体的质量;g为重力加速度;A为激励位移幅值。
采用非线性理论中的多尺度法求解上述方程。多尺度法的思想是对自变量采用多种不同的变化尺度渐进展开求解。引入(M+1)个不同尺度的时间变量
Tm=εmtm=0,1,2,…,M
( 7 )
y为(M+1)个独立自变量的函数,不再是单个自变量t的函数,即
y(t;ε)=t(T0,T1,…,TM;ε)=
( 8 )
随着m的增加,自变量Tm随时间t变化的速度依次减小一个数量级。M的值取决于求解时保留的阶数。本文引入2个不同尺度的时间变量,即取M为1。忽略高阶无穷小量,则有
y(t;ε)=y0(T0,T1)+εy1(T0,T1)
( 9 )
式( 1 )可改写为
(10)
其中ε为小参数
2εμ=2ζω
(11)
(12)
(13)
通过引入不同尺度的时间变量,使得对于时间t的导数变为对于Tm的偏导数展开式
(14)
(15)
将上述方程代入非线性振动方程,就能按ε的幂次得到各阶求解方程,即关于y0,y1,…,yM的方程组,各方程的解中包含不同尺度时间变量T0,T1,…,TM的任意函数。
(16)
(17)
(18)
(19)
利用消除永年项得到附加条件
-2iω[A(T1)′+μA(T1)]-
(20)
引入极坐标
(21)
-iω[a′+aiφ′+μa]-
(22)
γ=σT1-φ
(23)
(24)
(25)
(26)
可以得到非线性有阻尼动力学方程的激励位移幅值A与激励频率Ω之间的关系为
(27)
式(27)可用来计算磁浮式非线性换能器的幅频响应特性。
另外,我们还需要计算磁浮式非线性换能器的时域响应,式( 1 )可以改写为
(28)

BncosnΩ(t-t0)]
(29)
式中:A0、N、An、Ω、t0、Bn(n=1,2,…,N)为通过傅里叶级数曲线拟合定义的常数。
为了获得时域的振动响应,我们采用显式积分法求解磁悬浮振子的非线性微分方程。轨道振动激励采用傅里叶级数表示。
1.3 轨道振动激励下电磁耦合方程
麦克斯韦电磁耦合方程可写为

(30)
(31)
式中:Br为悬浮磁体表面磁通密度;v为导电体的速度;Je为电流密度;σ为电导率;μ0为真空的磁导率;μr为介质的相对磁导率;B为磁感应强度;E为感应电动势。
式(30)、式(31)可用于计算换能器产生的感应电压Vind,换能器对负载电阻Rload的输出功率为
(32)
其中线圈的内阻Rcoil为
(33)
式中:N为线圈匝数;L为线圈截面外圈的周长;σcoil为线圈导线的体积电导率;acoil为线圈导线截面面积;Acoil为线圈截面的面积。换能器的阻尼系数可由式(34)计算。
(34)
式中:Lcoil为线圈电感;Fdamp为阻尼力。阻尼比为
(35)
2 换能器设计与试验
2.1 磁浮式振动换能器设计
磁浮式振动换能器的设计如图3所示。两个静止磁体分别固定于上下铝轴套上。上下铝轴套机械连接到聚甲基丙烯酸甲酯(PMMA)管上。在两个静磁体之间的PMMA管中心位置放置一个悬浮磁体,磁体的磁极方向设置为排斥中心悬浮磁体,使中心磁体悬浮在PMMA管内。悬浮磁体与静止磁体的距离可以通过改变磁体的表面磁感应强度调整。PMMA管的外环安装有铜线圈,线圈匝数和线圈几何尺寸可调。PMMA管协同支撑环一起固定在支座上,固定支座一侧留螺栓孔,可通过螺栓将其固定在钢轨夹持器的一侧。钢轨夹持器由两独立U形夹持块组成,夹持块底部具有贯通的螺栓孔,安装时将夹持块置于轨底两侧,通过长螺栓将两夹持块连接成整体,并夹紧轨底,实现振动换能器与钢轨的连接。钢轨的振动加速度会传递到固定支座上,作为振动换能器的激励,进一步激发悬浮磁体产生动态响应。
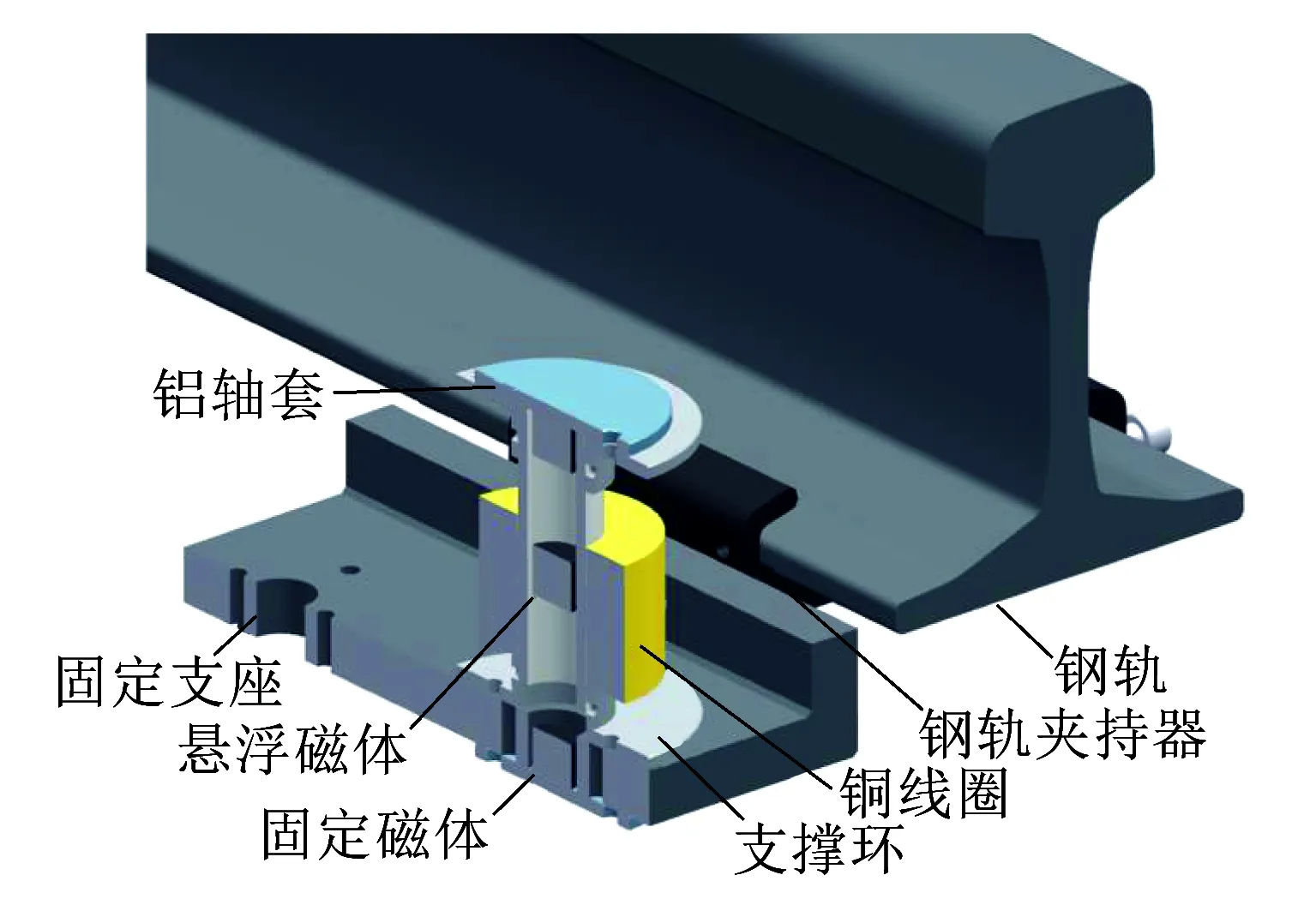
图3 磁浮式振动换能器设计
2.2 磁浮式轨道振动俘能试验
磁浮式轨道振动俘能装置的扫频振动测试如图4所示。该测试的目的是评估磁浮式振动换能器的有效工作频带。根据文献[28]的规定,选择两个频率范围(5~200 Hz和5~500 Hz),加速度幅值设定为2g和4g。文献[28]规定了在交越频率(振动试验中,振动特征控制量由位移转变为加速度时的频率值)以下的恒定位移幅值激励和在交越频率以上的恒定加速度幅值激励,扫频10次,扫频速率为每分钟一个倍频。交越频率由激振器本身的激励机理决定,理想情况下应始终采用恒定加速度激励,但是在起始扫频时,维持恒定加速度需要较大的振动位移,因此需要一个频率段从恒定位移激励过渡到恒定加速度激励。采用两种悬浮磁体,质量分别为61.4 g和122.8 g。设置两个集成电子压电加速度计(IEPE),分别控制振动台的振动激励和监测磁浮振子的动态响应,其中控制用加速度传感器的灵敏度为9.71 mV/g,监测用加速度传感器的灵敏度为9.73 mV/g。磁浮式振动换能器参数及试验设置见表1。设置了3种工况,工况1和工况2具有相同的非线性刚度k3,工况1和工况3具有相同的线性刚度k,工况1和工况2采用相同质量的悬浮磁体,工况3悬浮磁体的质量是工况1、工况2的两倍。3种工况的几何尺寸均需满足文献[29]的要求。

图4 磁浮式轨道振动换能器扫频振动试验1—监测用IEPE加速度传感器;2—悬浮磁体;3—铜线圈;4—控制用IEPE加速度传感器;5—电源装置;6—控制软件界面;7—振动控制器;8—磁浮式振动换能器;9—振动台;10—示波器;11—数据记录终端。
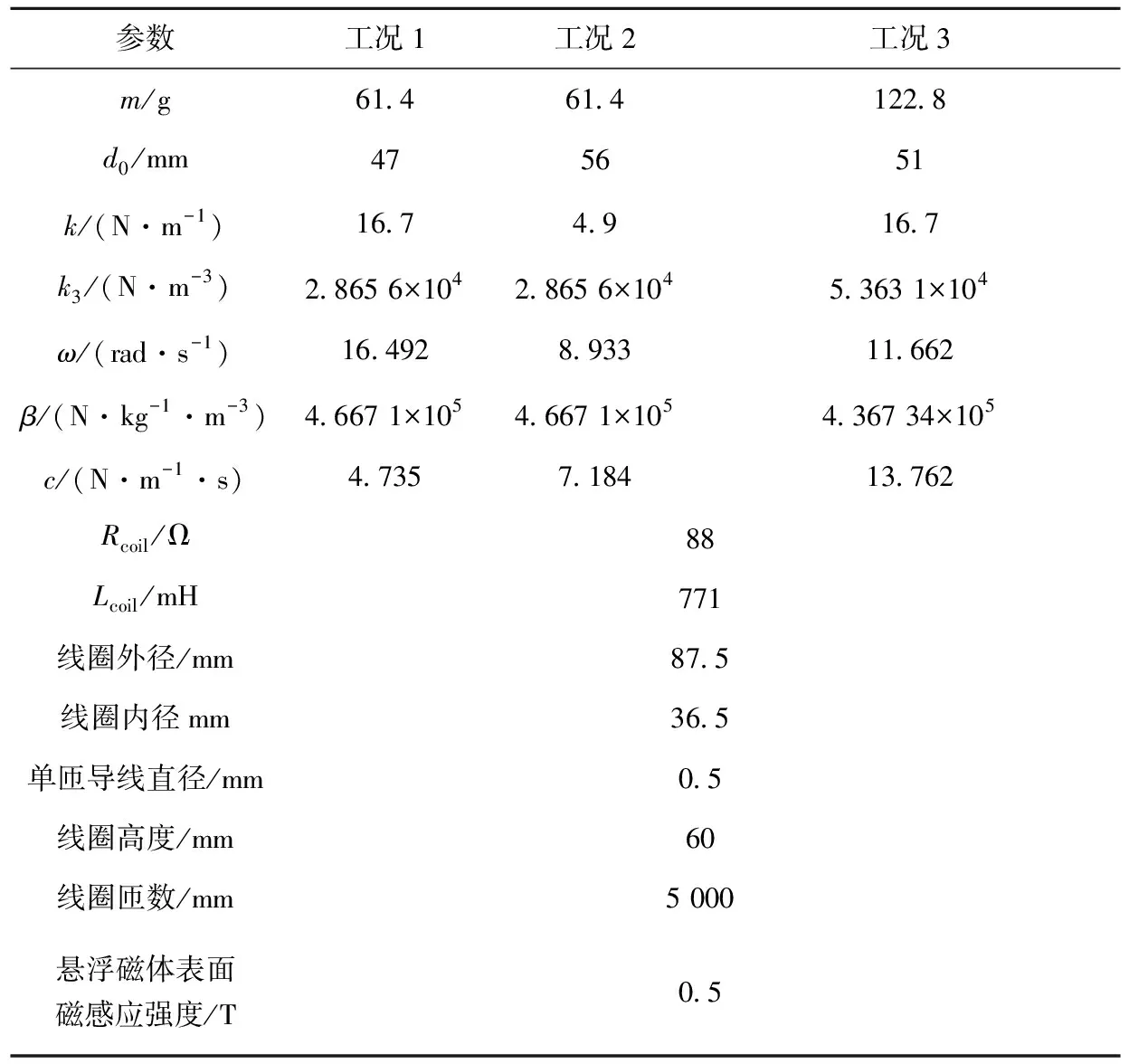
参数工况1工况2工况3m/g61.461.4122.8d0/mm475651k/(N·m-1)16.74.916.7k3/(N·m-3)2.865 6×1042.865 6×1045.363 1×104ω/(rad·s-1)16.4928.93311.662β/(N·kg-1·m-3)4.667 1×1054.667 1×1054.367 34×105c/(N·m-1·s)4.7357.18413.762Rcoil/Ω88Lcoil/mH771线圈外径/mm87.5线圈内径mm36.5单匝导线直径/mm0.5线圈高度/mm60线圈匝数/mm5 000悬浮磁体表面磁感应强度/T0.5
注:d0为磁体间的几何距离。
试验测试采用Tektronics公司DPO2024示波器监测输出电压波形,示波器探头的正负极分别连接到振动换能器的输出端。测试中开启示波器的噪声滤波功能,滤除600 kHz以上的干扰噪声。同时示波器被用作数据采集设备,并通过Labview Signal Express软件连接到笔记本电脑,这样就可以激活自动触发/记录模式,实现连续数据采样。数据存储在笔记本电脑的硬盘上,供后续分析和使用。
此外,还进行了模拟轮对激励作用下的电磁振动换能器性能测试,如图5所示。液压作动器可施加最高140 kN的作用力,模拟列车行经时的轮轨交互作用力。该试验的详细步骤及结果可参考文献[3]。

图5 模拟轮对激励作用下的电磁振动换能器性能测试1—作动器;2—磁浮式振动换能器;3—数据记录终端;4—能量转换电路;5—示波器;6—悬浮磁体;7—铜线圈;8—IEPE加速度传感器;9—钢轨;10—谐振式电磁振动换能器。
3 结果与讨论
悬浮磁体受到的非线性磁浮力可以采用麦克斯韦应力张量法[8]进行计算。图6为工况1中悬浮磁体受到的非线性磁浮力及非线性刚度。由图6可知,磁浮式振动换能器具有正的立方刚度k3,对应硬弹簧特性。线性刚度k可以通过改变悬浮磁体与静止磁体的距离调整。

(a)非线性磁浮力(b)非线性刚度
图6 磁浮式振动换能器非线性特性曲线
图7(a)为CRH380A高速列车以240 km/h的速度通过无砟轨道结构时钢轨的垂向加速度实测时程曲线。轨道为无缝线路,由Vossloh300-1弹条扣件固定,并通过轨下胶垫支撑在混凝土双块式轨道上。CRH380A型列车由两节动力车和六节拖车组成,每节车由4个轮对支撑,轴距为2.5 m,车辆定距为18 m,动力车长25.7 m,拖车长25 m。CRH380A列车总长为203 m。加速计位于轨底,数据采样频率为12.8 kHz。图7(b)为加速度信号的功率谱密度。图7(b)表明钢轨的垂向振动加速度信号在较宽的频率范围内具有功率谱密度分量,因此在扫频振动试验中采用5~500 Hz的宽频激励频带。
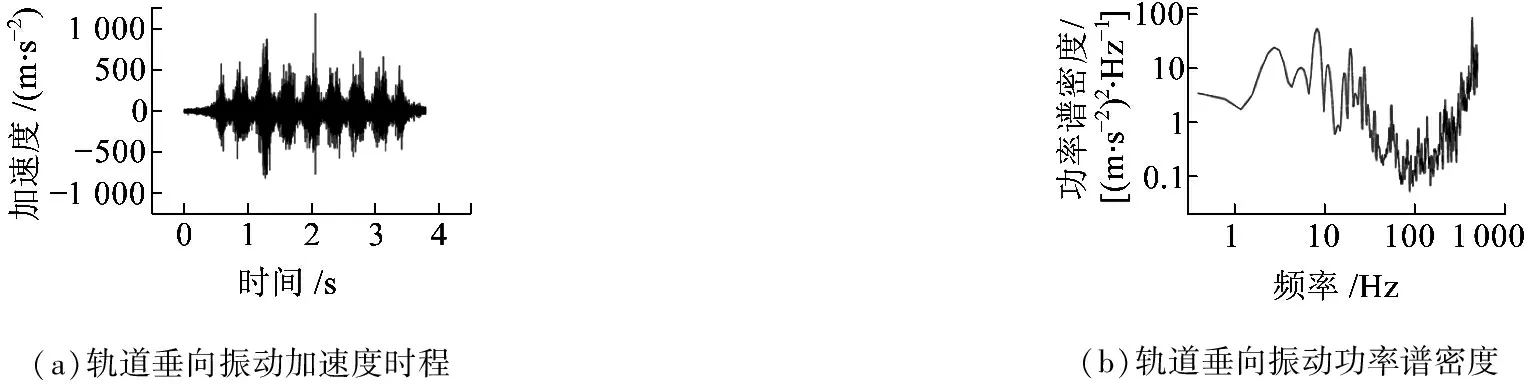
(a)轨道垂向振动加速度时程(b)轨道垂向振动功率谱密度
图7 实测轨道垂向振动加速度时程曲线与功率谱密度
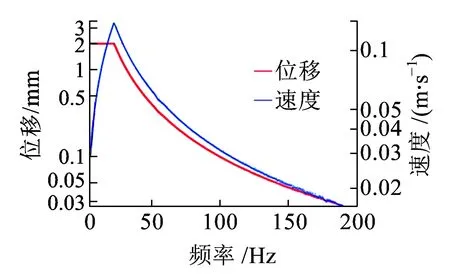
轨道的垂向振动速度和位移通过2.1节所述的车辆-轨道耦合动力学模型计算。输入波长范围为1.524~304.8 m的美国轨道谱作为轨道不平顺激励。文献[27]比较了1~30 m波长范围内美国轨道谱和中国三大干线谱,结论是:我国三大干线谱的高低不平顺总体上大于美国五级和六级轨道谱数值,表明我国线路高低几何状态较差[27]。轨道振动俘能主要利用轨道的垂向振动发电,因此较好的线路几何状态意味着轨道振动幅值较小,对于振动发电来说更具挑战性,因此本文选用美国轨道谱进行计算。从图8可以看出,钢轨的振动位移幅值通常小于2 mm。车辆行经时钢轨振动速度幅值的峰值大于0.2 m/s。

(a)振动速度(b)振动位移
图8 列车行经时轨道垂向振动速度与振动位移
磁浮式非线性振动换能器的幅频响应特性曲线如图9~图12所示。其中图9(a)、图10(a)、图11(a)和图12(a)为只考虑机械阻尼系数(cm)的情况,图9(b)、图10(b)、图11(b)和图12(b)为同时考虑机械阻尼系数和电磁阻尼系数(ce)的情况。机械阻尼主要是由于悬浮磁体与PMMA管壁之间的机械摩擦等产生,电磁阻尼则是由于悬浮磁体在线圈中运动时受到了楞次作用力而产生。非线性振动换能系统的频率与其振幅有关,当β>0时(硬刚度特性),频率随幅值的增加而增大,这是由于系统的刚度随着振幅增加变化的缘故。需要注意的是,电磁阻尼系数可以通过改变线圈匝数、线圈几何形状、线圈内阻等来调节,以符合特定的应用要求。

(a)c=cm(b)c=cm+ce

图9 磁浮式振动换能器位移幅值-频率响应特性曲线

图10 磁浮式振动换能器速度幅值-频率响应特性曲线

图11 磁浮式振动换能器加速度幅值-频率响应特性曲线
图12 磁浮式振动换能器速度幅值与加速度激励关系曲线
图9~图12为采用工况1参数计算的结果。机械阻尼系数为0.19,电磁阻尼系数为4.545。图12为激励频率30π rad/s时,磁浮式振动换能器速度幅值与加速度激励关系曲线。对于电磁能量收集系统,其产生的功率与电磁阻尼系数及速度响应幅值的平方成正比。电磁阻尼由设备参数(线圈匝数、线圈几何形状和布置、表面磁通密度等)确定,可以根据铁路行业的具体要求进行调整。图10(b)为悬浮振子速度响应振幅的理论预测值。在30~500 Hz范围内,速度幅值大于0.15 m/s。电磁式振动换能器属于阻尼元件,其感应电压值与悬浮磁体的振动速度幅值成正比[12,14],当其振动速度幅值大于0.15 m/s时,根据计算结果其感应电压大于1.8 V,即可用于为DC-DC电路供电[3],这表明在较宽的频带范围内磁浮式振动换能器能够有效收集振动能量。
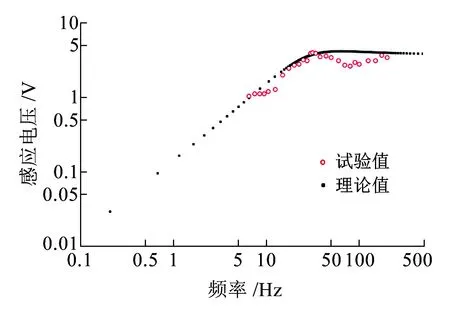
图13 磁浮式振动换能器输出电压理论计算值与试验测试结果
图13为磁浮式振动换能器输出电压理论计算值与试验测试结果的对比。在交越频率之下,试验结果与理论预测吻合较好。在交越频率之上,理论预测值与测试值之间的差异随着频率的增加而增大。这可能是由线圈自感系数的变化以及高频下的漏感引起的。
磁浮式非线性振动换能器的时域响应特性如图14所示。图14为速度240 km/h高速列车行经时的轨道垂向振动加速度和计算得出的磁浮式换能系统的感应电压值。本文使用实测的钢轨振动加速度信号作为计算模型(图1)的输入来计算系统的感应电压。测量的加速度信号包括由轨道不平顺和车轮不圆顺引起的高频分量。波峰和波谷的位置与车辆转向架的位置相对应,感应电压峰峰值为5 V。电磁式振动换能器是一种黏弹性阻尼器件,其感应电压与速度幅值成正比。如图8(a)和图14所示,感应电压的波形曲线与轨道振动速度的波形曲线相似。
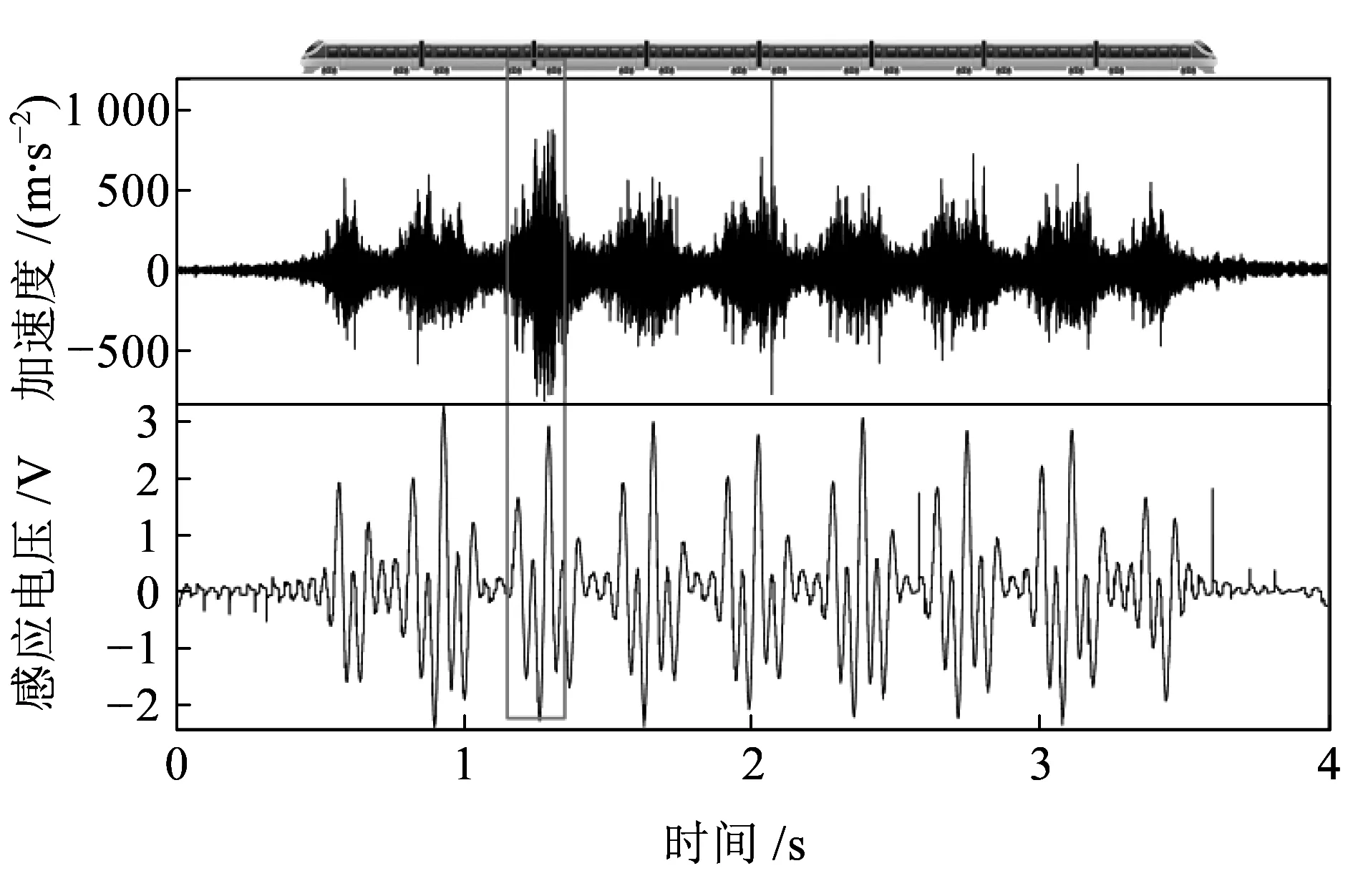
图14 列车激励作用下磁浮式振动换能器时域响应特性曲线
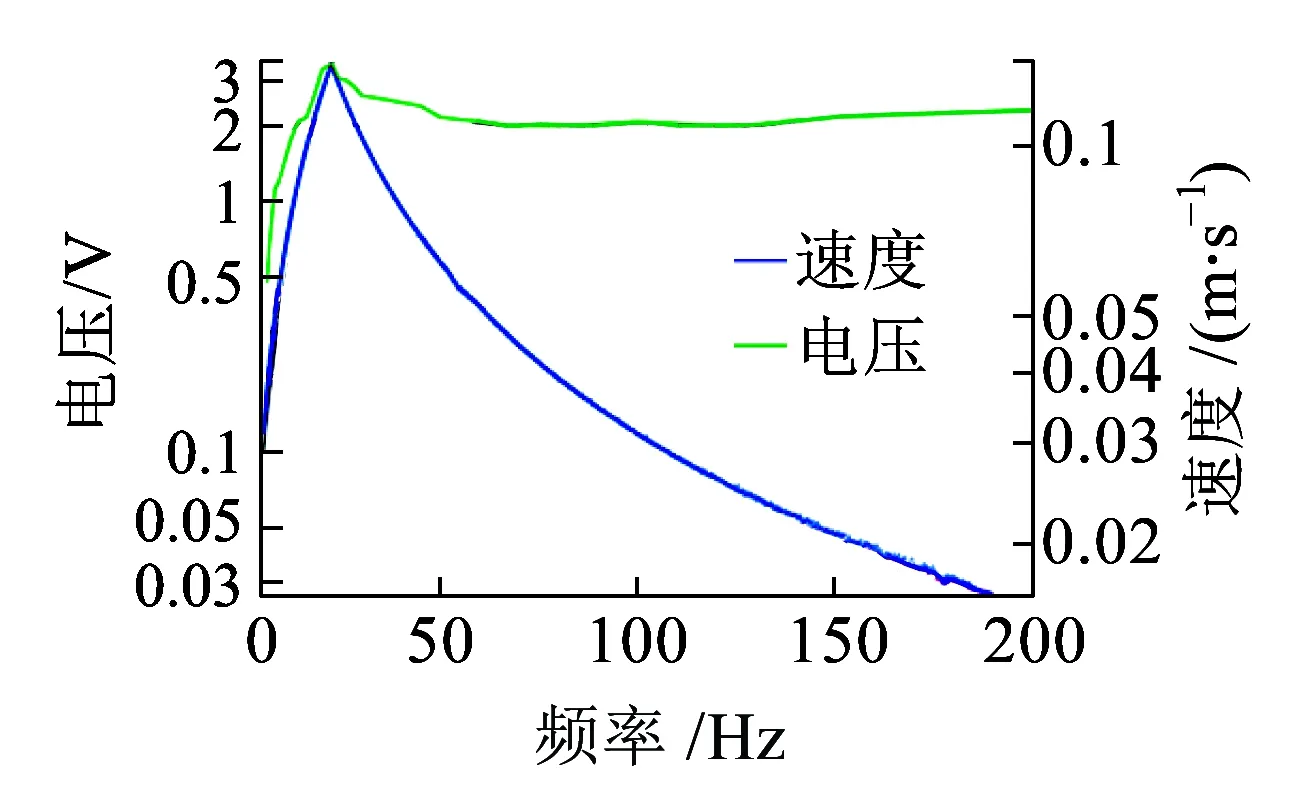
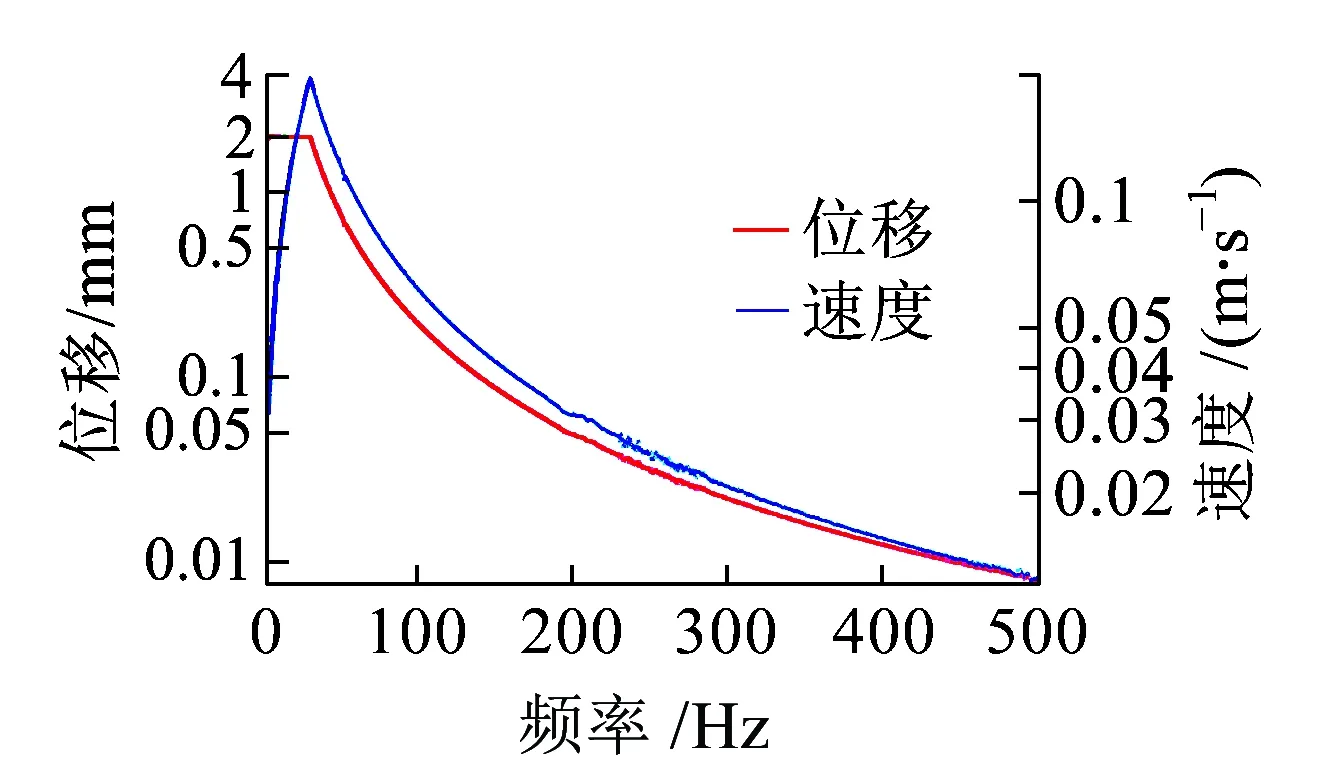
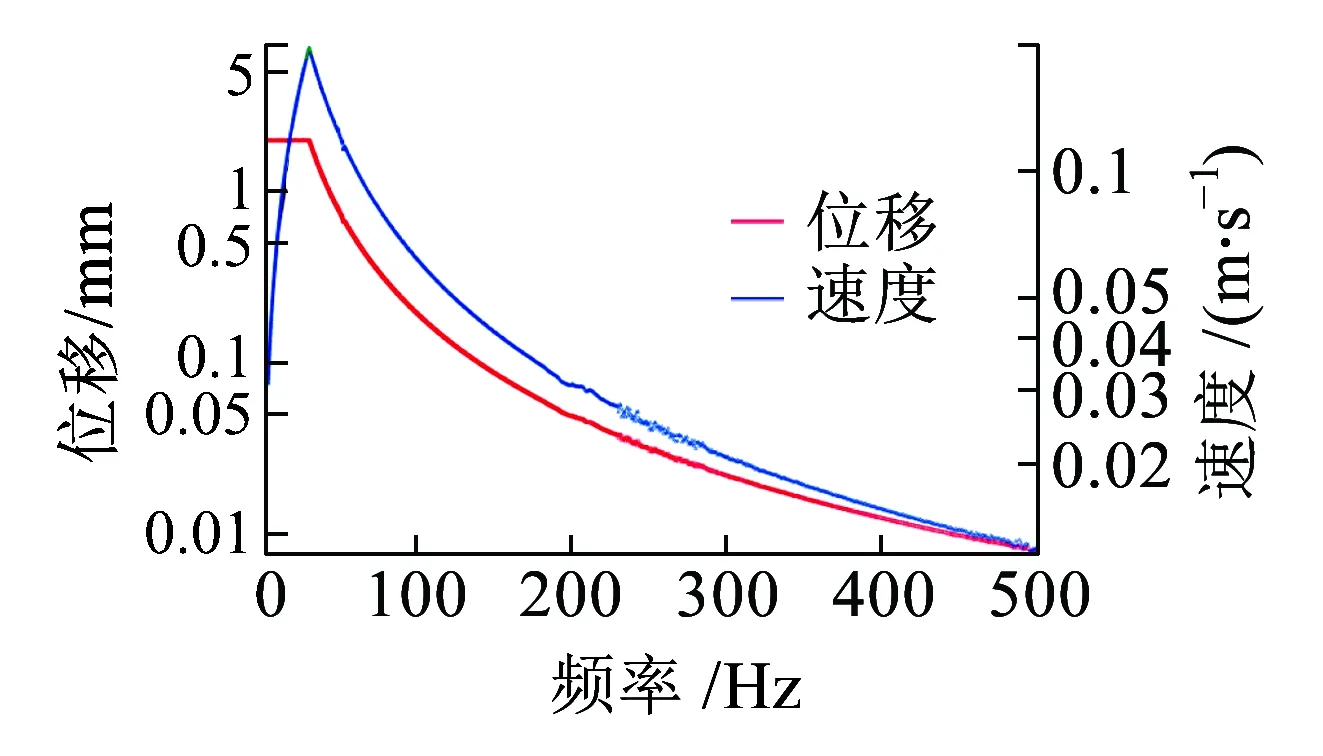
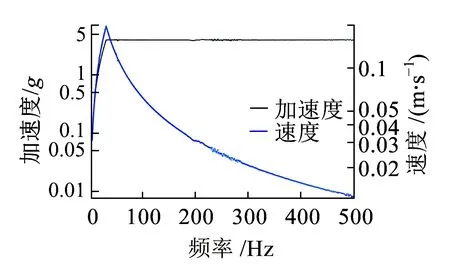
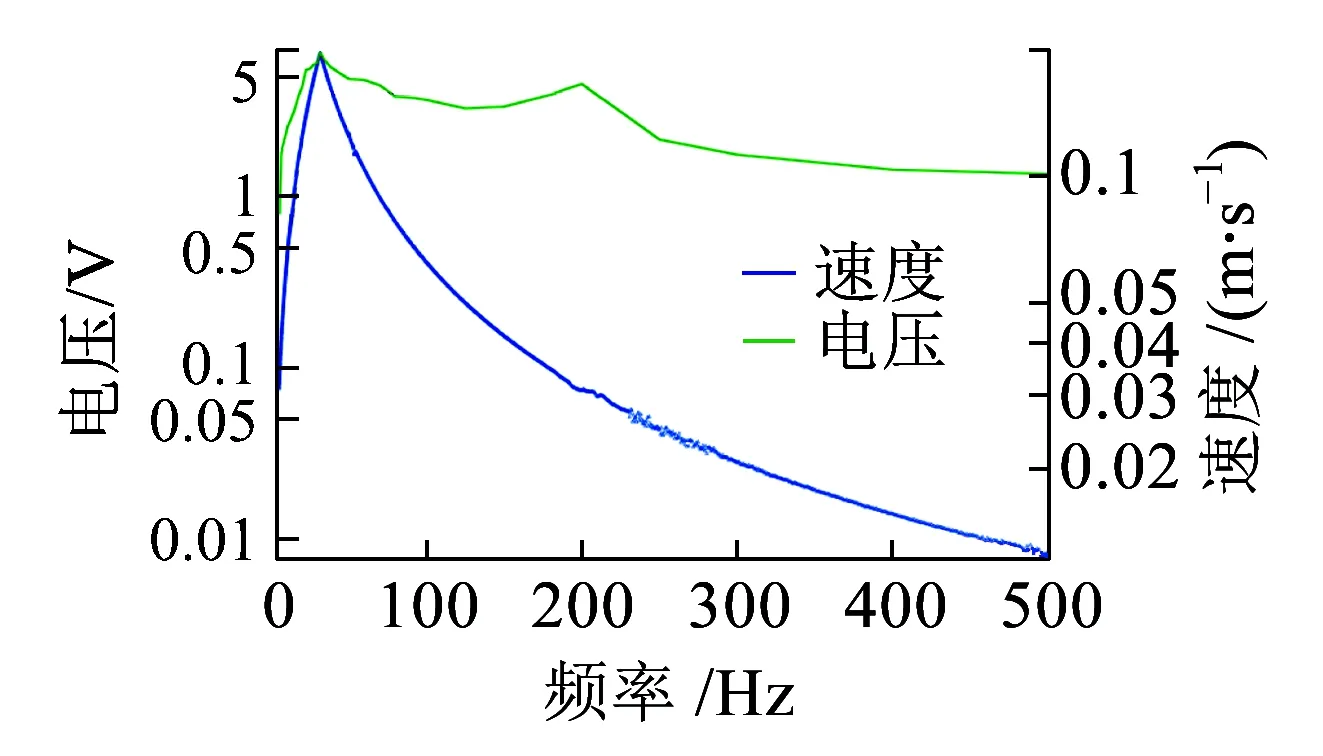
按照文献[28]的规定开展扫频振动试验。在交越频率值以下,振动台输入激励为恒定位移;在交越频率值以上,激励条件为恒定加速度幅值。速度幅值在交越频率处达到极大值。根据实测得到的轨道垂直加速度信号的功率谱密度,我们设定起始频率为5 Hz,截止频率为500 Hz。采用两种激励模式:激励模式1的交越频率为22.3 Hz;在交越频率以下,其位移幅值为1 mm(峰峰值为2 mm);在交越频率以上有恒定的2g加速度激励幅值;最大速度幅值为0.14 m/s。激励模式2的交越频率是31.5 Hz;在交越频率以下,其位移幅值为1 mm(峰峰值为2 mm);在交越频率以上有恒定的4g加速度激励幅值;最大速度幅值为0.198 m/s。对于两种不同的激励模式,其控制值在图15~图18中给出。采用连续扫频,频率随时间呈指数变化。扫描速率为每分钟一个倍频,容差为±10%。
(a)位移与速度控制值
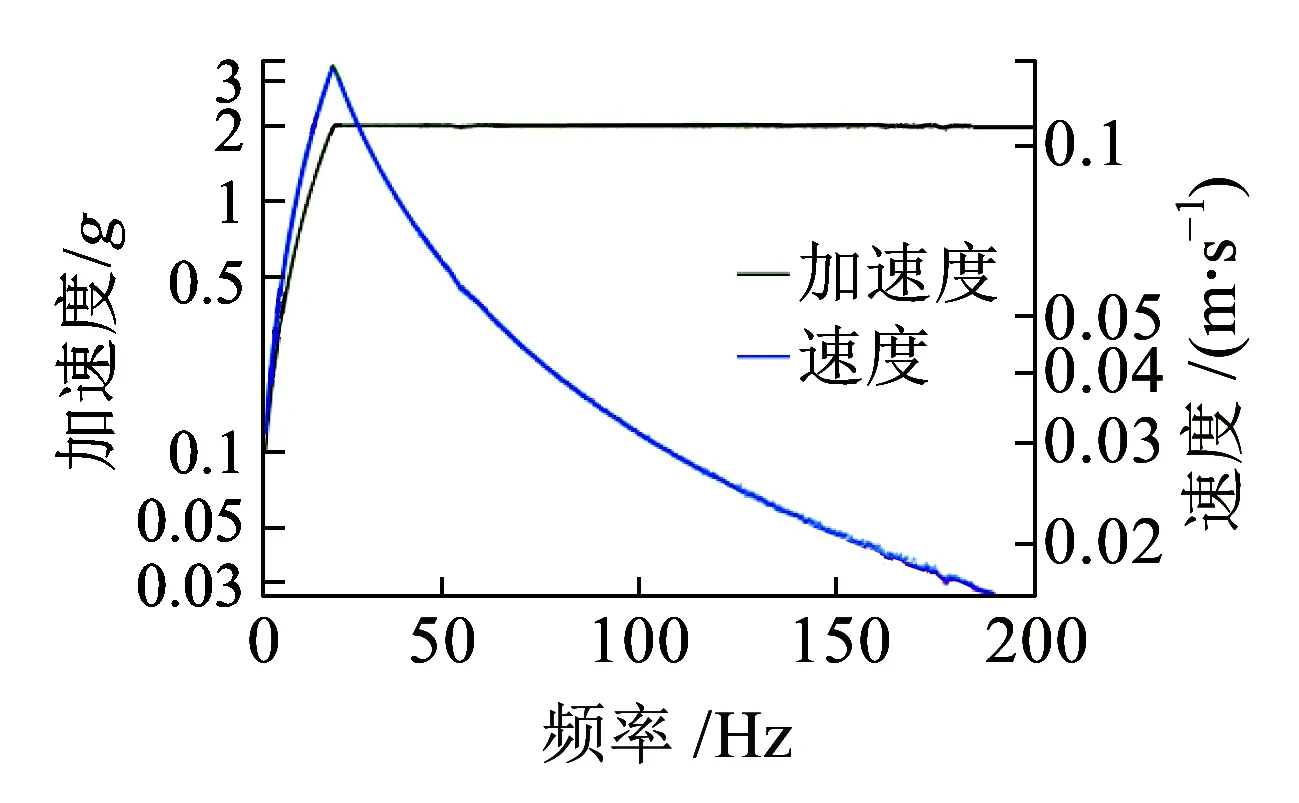
(b)加速度与速度控制值
(c)电压与速度控制值图15 扫频振动测试(工况2,5~200 Hz,激励模式1)

(a)位移与速度控制值

(b)加速度与速度控制值
(c)电压与速度控制值图16 扫频振动测试(工况3,5~200 Hz,激励模式1)
(a)位移与速度控制值

(b)加速度与速度控制值

(c)电压与速度控制值图17 扫频振动测试(工况1,5~500 Hz,激励模式2)
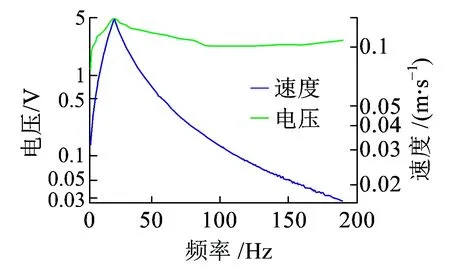
(a)位移与速度控制值
(b)加速度与速度控制值
(c)电压与速度控制值图18 扫频振动测试(工况3,5~500 Hz,激励模式2)
如图15~图18所示,在交越频率以上,位移激励测量幅值随着频率的增加而减小。激励速度的测量幅值最大值位于交越频率处,激励加速度的测量幅值在交越频率以上具有恒定值。安装在轨道上的振动换能器受到轨道振动加速度的激励,因此需要设置恒定加速度激励,以评估磁浮式振动换能系统的有效工作频带。对于3种工况,在较宽的频率范围内可获得有效电压值。我们使用了一个DC-DC芯片组,可在0.9~5 V的输入电压范围内工作。半桥整流器的正向压降约为0.35 V(采用肖特基二极管,它具有较低的正向压降(IF=10 mA)),因此需要至少1.8 V的输入电压才能使DC-DC模块工作。工况3具有最佳的输出性能,最大输出电压为6.96 V,有效频带为7~500 Hz。
4 结束语
本文建立轨道振动-电磁耦合动力学模型,该模型可以计算列车行经时轨道结构的发电能力,为电磁式轨道振动俘能系统提供了理论依据和设计指导。提出并设计了磁浮式轨道振动俘能系统,理论计算和分析表明,利用其非线性刚度特性可在宽频带内收集轨道振动能量。开展了磁浮式轨道振动俘能系统的试验研究,结果显示磁浮式轨道振动俘能系统可在宽频带内有效俘获轨道振动能量。该系统潜在的应用场景是轨道结构的状态监测,可为铁路及桥梁无线传感器网络的传感器节点提供持续电力供给。
参考文献:
[1]HODGE V J,O’KEEFES,WEEKS M,et al.Wireless Sensor Networks for Condition Monitoring in the Railway Industry:A Survey[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(3):1088-1106.
[2]WILLIAMS C B,YATES R B.Analysis of a Micro-electric Generator for Microsystems[J].Sensors Actuators A:Physical,1996,52(1/3):8-11.
[3]GAO M Y,WANG P,CAO Y,et al.Design and Verification of a Rail-borne Energy Harvester for Powering Wireless Sensor Networks in Railway Industry[J].IEEE Transactions on Intelligent Transportation Systems,2017,18:1596-1609.
[4]GAO M Y,WANG P,CAO Y,et al.A Rail-borne Piezo-electric Transducer for Energy Harvesting of Railway Vibration[J].Journal of Vibroengineering,2016,18(7):4647-4663.
[5]WANG P,WANG Y F,GAO M Y,et al.Investigation on the Train Aerodynamic Performance and Energy Harvesting with Track-borne Wind Turbine[C]//Proceedings of the 96th Annual Meeting of Transportation Research Board.Washington D.C.:[s.n.],2017:17-00299.
[6]MITCHESON P D,YEATMAN E M,RAO G K,et al.Energy Harvesting from Human and Machine Motion for Wireless Electronic Devices[J].Proceedings of the IEEE,2008,96(9):1457-1486.
[7]STEPHEN N G.On Energy Harvesting from Ambient Vibration[J].Journal of Sound and Vibration,2006,293(1/2):409-425.
[8]GAO M Y,HU C Z,CHEN Z Z,et al.Design and Fabrication of a Magnetic Propulsion System for Self-propelled Capsule Endoscope[J].IEEE Transaction on Biomedical Engineering,2010,57(12):2891-2902.
[9]HOFFMAN D,FOLKMER B,MANOLI Y.Fabrication,Characterization and Modelling of Electrostatic Micro-ge-nerators[J].Journal of Micromachanics and Microengineering,2009,19(9):1489-1503.
[10]SUZUKI Y.Development of a MEMS Energy Harvester with High-performance Polymer Electrets[C]//Proceedings of Power MEMS,2010.
[11]ERTURK A,INMAN D J.An Experimentally Validated Bimorph Cantilever Model for Piezoelectric Energy Harvesting from Base Excitations[J].Smart Materials and Structures,2009,18(2):025009.
[12]LESIEUTRE G A,OTTMAN G K,HOFMANN H F.Damping as a Result of Piezoelectric Energy Harvesting[J].Journal of Sound and Vibration,2004,269(3/5):991-1001.
[13]DONELAN J M,LI Q,NIANG V,et al.Biomechanical Energy Harvesting:Generating Electricity during Walking with Minimal User Effort[J].Science,2008,319:807-810.
[14]MANN B P,SIMS N D.Energy Harvesting from the Nonlinear Oscillations of Magnetic Levitation[J].Journal of Sound and Vibration,2009,319(1/2):515-530.
[15]BEEBY S P,TORAH R N,TUDOR M J,et al.A Micro Electromagnetic Generator for Vibration Energy Harvesting[J].Journal of Micromachanics and Microengineering,2007,17(7):1257-1265.
[16]Innowattech Ltd.,ABRAMOVICH H,HARASH E,et al.Piecoelectric Stack Compression Generator:America,US2011/0291526[P].2011-12-01.
[17]YUAN T C,YANG J,SONG R G,et al.Vibration Energy Harvesting System for Railroad Safety Based on Running Vehicles[J].Smart Materials and Structures,2014,23(12):125046.
[18]袁天辰.基于车辆运行的轨道振动能量回收系统研究 [D].上海:上海工程技术大学,2014.
[19]WANG J J,SHI Z F,XIANG H J,et al.Modeling on Energy Harvesting from a Railway System Using Piezo-electric Transducers[J].Smart Materials and Structures,2014,24(10):105017.
[20]王海燕.车致轨道振动能量俘获研究[D].北京:北京交通大学,2013.
[21]NELSON C A,PLATT S R,ALBRECHT D,et al.Power Harvesting for Railroad Track Health Monitoring Using Piezoelectric and Inductive Devices[C]//Proceedings of SPIE:Active and Passive Smart Structures and Integrated Systems,2008.
[22]GATTI G,BRENNAN M J,TEHRANI M G,et al.Harvesting Energy from the Vibration of a Passing Train Using a Single-degree-of-freedom Oscillator[J].Mechanical Systems and Signal Processing,2016,66/67:785-792.
[23]WANG J J,PENAMALLI G P,ZUO L.Electromagnetic Energy Harvesting from Train Induced Railway Track Vibrations[C]//Proceedings of IEEE/ASME International Conference on Mechatronics and Embedded Systems and Applications.Suzhou:IEEE,2012:29-34.
[24]POURGHODRAT A,NELSON C A,HANSEN S E,et al.Power Harvesting Systems Design for Railroad Safety[J].Journal of Rail and Rapid Transit,2014,228(5):504-521.
[25]POURGHODRAT A.Energy Harvesting Systems Design for Railroad Safety[D].Nebraska:University of Nebraska-Lincoln,2011.
[26]ZHANG X T,ZHANG Z T,PAN H Y,et al.A Portable High-efficiency Electromagnetic Energy Harvesting System Using Supercapacitors for Renewable Energy Applications in Railroads[J].Energy Conversion and Management,2016,118:287-294.
[27]翟婉明.车辆-轨道耦合动力学[M].4版.北京:科学出版社,2015.
[28]International Electrotechincal Commission.International Standard IEC 60068-2-6,Test Fc:Vibration(sinusoidal)[S].Geneva:IEC Publications,2007.
[29]European Committee for Standardization.BS EN 15273-2 Railway Application-Gauges Part 2:Rolling Stock Gauge[S].Brussels:European Committee for Standardization,2014.
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
装备维修技术(2022年7期)2022-07-01
现代交通与冶金材料(2022年3期)2022-06-15
振动与冲击(2022年10期)2022-05-30
湖北汽车工业学院学报(2021年4期)2022-01-11
中国医疗设备(2019年3期)2019-03-15
电子制作(2018年2期)2018-04-18
舰船电子工程(2017年11期)2017-12-25
水下无人系统学报(2017年5期)2017-11-22
电子制作(2017年7期)2017-06-05
