
基于改进的RSSI的车间移动节点MCL算法*
2018-07-03 03:14刘小园
吉首大学学报(自然科学版) 2018年3期
刘小园
(罗定职业技术学院电子信息系,广东 罗定 527200)
目前,无线传感网络(WSN)的定位算法主要有2大类:需要测距的和无需测距的.需要测距的定位算法主要有基于信号到达时间(TOA)算法[1]、基于不同信号到达时间差(TDOA)算法[2]、基于信号到达角度(AOA)算法[3]和基于接收信号强度指示(RSSI)算法[4];无需测距的定位算法主要有求解邻居节点构成的多边形几何重心的质心算法[5]、基于节点间跳数信息(DV-Hop)算法[6]和基于多尺度规划(MDS-MAP)算法[7],这些多是固定节点的定位算法.最早的基于WSN的移动节点定位算法,是由美国Hu和Evans等2004年提出的蒙特卡罗定位(MCL)算法.由于车间资源具有广泛的移动特征,而基于RSSI的MCL算法存在计算量较大、计算时间较长、节点能量损耗大和无运动预测性等不足[4,7],因此笔者提出一种基于改进的RSSI的车间移动节点MCL算法(简称R-MCL算法).事实上,因为车间制造资源的运动轨迹一般都是有规律的,即其运动参数一般不会改变,所以可以利用移动节点前几个时间点的数据来预测移动节点当前时间点的运动轨迹,通过减少取样区域来提高取样效率和定位精度.
1 经典MCL算法
经典MCL算法是在机器人定位算法的基础上提出的,后来出现多种提高定位精度的改进算法[8-9],并广泛应用于WSN的移动节点定位中.经典MCL算法基于以下假设:样本节点和未知节点都是移动的;时间被均分为若干离散间隙,每个时间点获取1次节点位置信息;未知节点最大移动速度记作Vmax;节点通信范围半径记作R.经典MCL算法的核心思想是,在贝叶斯滤波位置估计的基础上,将未知的移动节点(车间移动资源)下一个时间点估计位置用加权样本集表达为后验概率密度分布.经典MCL算法主要有3步:初始化、取样和结果输出.其中取样是核心步骤,分为3个阶段:预测、滤波和重要性取样.经典MCL算法流程如图1所示.
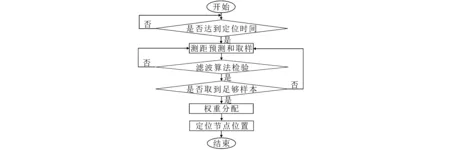
图1 经典MCL算法流程Fig. 1 Flow Chart of Monte Carlo Localization Algorithm
经典MCL算法的最大优点是,在存储有限、锚点分布密度低的情况下,能实现较高的定位精度和取样效率;缺点是必须取得足够多的分布在状态后验密度取值较大的区域,才能获得较好的定位效果.
2 R-MCL算法
2.1 RSSI模型

在本研究的车间环境中,定义R为接收信号的强度,T为距离信号发射节点1.2 m处的信号强度,m为未知节点与信号发射节点的距离,则车间模型为R=T-10nlgm.
RSSI的信号衰减受外界环境影响较大,同一RSSI值在相同的WSN中节点间的距离却经常不同,导致最后估计的距离与实际距离误差很大.为了修正此误差,将参考节点之间的距离和RSSI这2个信息作为参考来校正未知节点的距离.
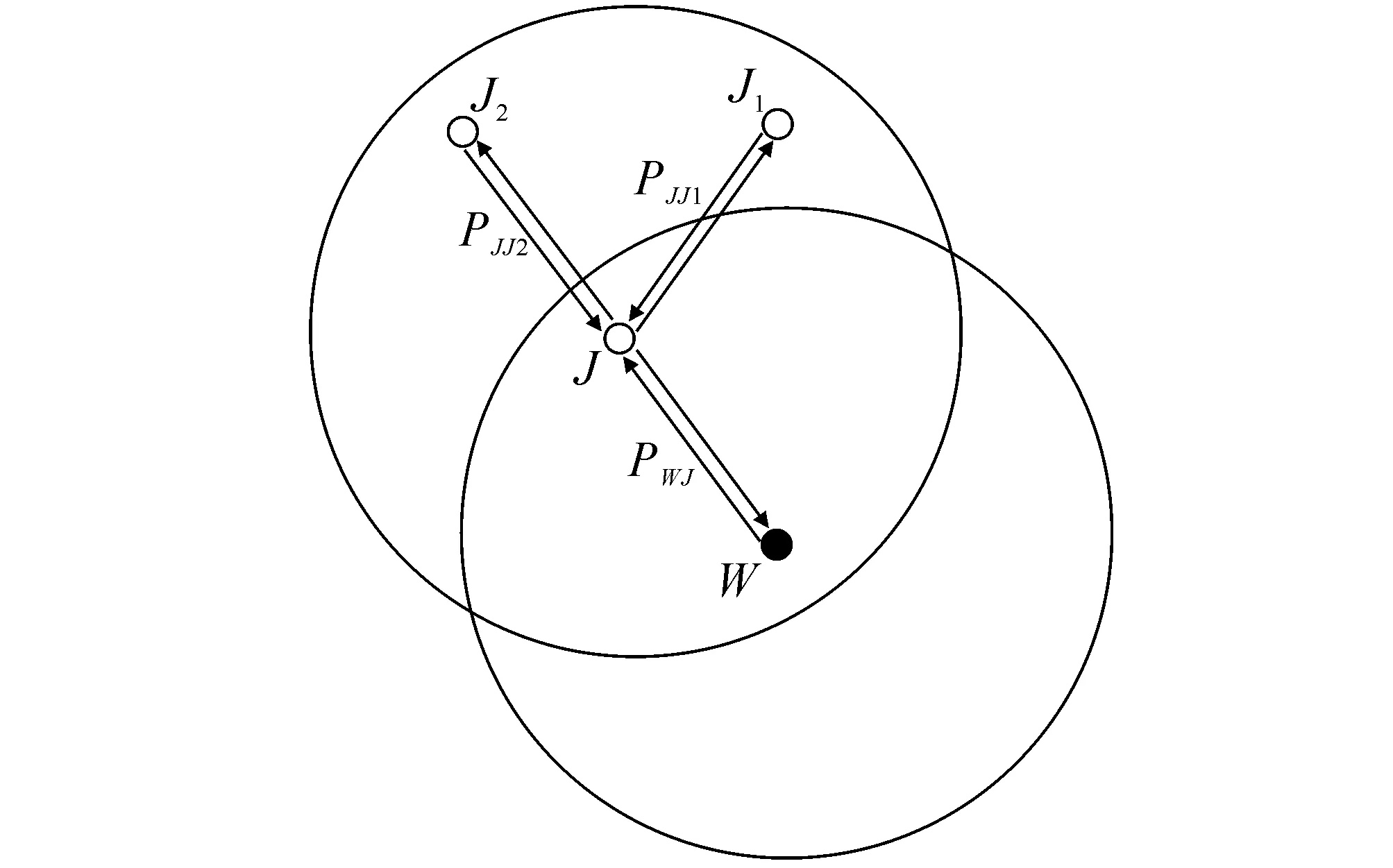
图2 一跳参考节点与未知节点和邻近参考节点的通信过程Fig. 2 Communication Process Between a Hop Reference Node and an Unknown Node and Other Neighboring Reference Nodes
未知节点W接收到参考节点I的RSSI的平均值RI(单位:dBm),与未知节点W接收到参考节点I的信号强度平均值PI(单位:mW)的转换关系为PI=10RI/10;参考节点I接收到的另一个参考节点J的RSSI的平均值RIJ(单位:dBm),与参考节点I接收到的另一个参考节点J的信号强度平均值PIJ(单位:mW)的转换关系为PIJ=10RIJ/10.那么,
(1)
其中:DWI为未知节点W与参考节点I的距离;DIJ为参考节点I与参考节点J的距离.
一跳参考节点与未知节点和邻近参考节点的通信过程如图2所示.图2中:实心圆表示未知节点;空心圆表示参考节点;J为未知节点W一跳参考节点;J1和J2是J通信范围内的参考节点;J向通信范围内的W,J1和J2发射信号,并收到它们的反馈数据包(包括信号强度).那么,由(1)式可得W与J的距离
(2)
2.2 R-MCL算法描述

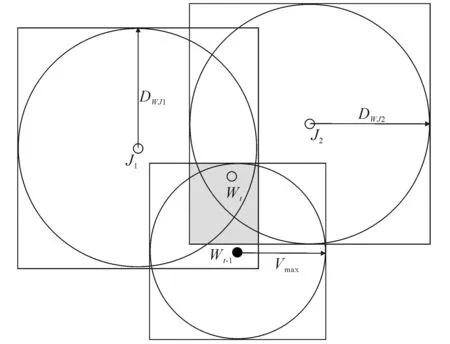
图3 基于未知节点RSSI模型构建的取样区域Fig. 3 A Sampling Region Constructed Based on an Unknown Node RSSI Model
(ⅱ)测距预测和取样.为了获取当前时间点t的样本集Kt,需要以上一时间点t-1的样本集Kt-1的位置为圆心,以最大速度Vmax为半径,以一跳参考节点的通信半径R为约束条件(为了减少计算量,当参考节点过多时,取最近3个参考节点的测距信息;为了方便取样算法,取通信圆的外切正方形代替有效通信圆形).基于未知节点RSSI模型构建的取样区域如图3所示.图3中阴影部分显示的是有效取样区域,其中Wt-1和Wt分别为W前一时间点和当前时间点的位置,J1和J2为一跳参考节点的最近参考节点.若因RSSI测距误差而出现无重叠有效取样区域,则迭代选择其他2个最近参考节点,直至出现有效取样区域位置.
(ⅲ)粒子过滤.在滤波阶段,从预测位置样本集中通过侦听广播信息排除那些完全不可能的样本.采用经典MCL滤波算法思想,当未知节点与一跳、二跳参考节点的距离大于节点自身通信半径的样本时就丢掉,符合(2)式的样本就保留,直至符合滤波条件的样本数达到N个.否则重复步骤(ⅱ).
(ⅳ)权重分配和位置估计.根据节点的通信原理,样本节点距离参考节点越近,则信号衰减越少,受外界干扰越少,RSSI测距误差越小,说明该样本的测距精度越高,分配的权重比例越大,因为该样本的预测位置与未知节点的真实位置越近.由前面3个步骤,取样本集K={K1,…,KN},其坐标相应地记作(x1,y1),…,(xN,yN),未知节点W与一跳参考节点J1,…,JM的距离记作R1,…,RM,则样本Ki的权重
(3)
由(3)式得到N个带权重的样本,则当前时间点未知节点W的位置坐标为可表示为
3 仿真结果与讨论
为了方便数据统计和性能对比,假设所有未知节点(车间移动资源)均服从随机移动模型,即未知节点下一时间点的移动轨迹未知,但未知节点的最大速度是确定的.在初始化阶段,所有节点随机分布在半径为200 m的圆形区域,时间间隔T=1 s,样本总数M=50,参考节点密度sd=1个/m2,未知节点密度nd=10个/m2.考虑车间节点间障碍物的个数和障碍物对信号的影响阈值,现场实验结果显示,RSSI测距模型中的实际与估计路径损耗的误差Xσ=-35 m,信号损耗系数n=2.6.现从时间、参考节点密度、未知节点密度和RSSI测距误差等4个方面在Matlab系统平台上进行仿真实验.
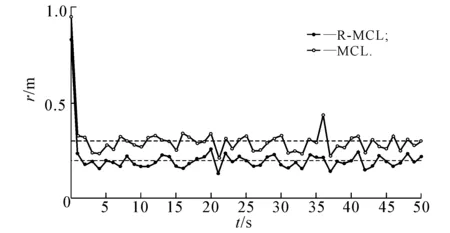
图4 定位精度误差随时间的变化关系Fig. 4 Relationship Between Location Error of R-MCL and MCL Algorithm over Time
3.1定位精度误差随时间的变化
R-MCL算法和MCL算法的仿真结果如图4所示.由图4可知,不管是R-MCL算法还是MCL算法,在系统初始化后的短时间内,定位精度均大幅度提高且稳定在一定范围内波动.R-MCL算法的定位精度误差在0.2 m附近波动,MCL算法的定位精度误差在0.31 m附近波动,前者的平均定位精度相比后者的提高了45%左右.图4中定位精度波动较大的原因是,当RSSI测距误差非常大时,测距超过了节点自身的通信范围,直接修正为满足节点连通性约束条件值,即R-MCL算法退化为经典MCL算法.
3.2 定位精度误差随参考节点密度的变化
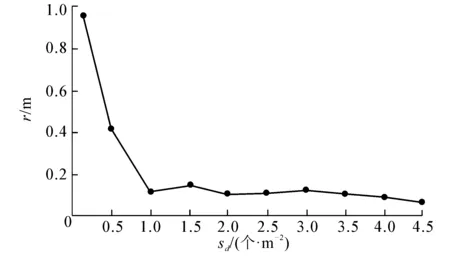
图5 参考节点密度对定位精度误差的影响Fig. 5 Influence of Reference Node Density on Location Accuracy
参考节点密度对定位精度误差的影响如图5所示.由图5可知:在参考节点密度取0~1个/m2时,定位精度误差快速降低;当参考节点密度增加到一定值(大于2个/m2)之后,定位精度误差随密度的变化不明显.这是因为对于移动节点来说,只要有3个有效参考节点就能达到R-MCL算法的滤波条件,大大减小了取样范围;同时,RSSI测距误差使得参考节点增加过多,增大了计算量,但对定位精度误差提高不大.因此,为了节约硬件投入成本,R-MCL算法与MCL算法一样,参考节点密度一般取1~2个/m2.
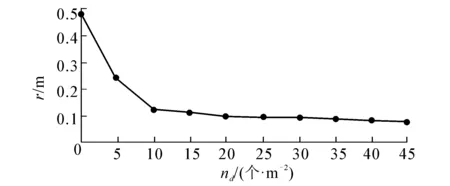
图6 未知节点密度对定位精度误差的影响Fig. 6 Influence of Unknown Node Density on Location Accuracy
3.3 定位精度误差随未知节点密度的变化
未知节点密度对定位精度误差的影响如图6所示.由于在RSSI模型测距预测过程中主要是以一跳参考节点的信息来确定取样区域,以二跳参考节点在R-MCL算法粒子滤波时作为参考,因此,当未知节点密度增加时二跳参考节点增多,在一定程度上定位精度误差还是随之减小,但幅度不大.因为仿真过程中没有增加参考节点密度,所以定位精度随着未知节点密度的增加而整体提高不大.
3.4 定位精度误差随RSSI测距误差的变化
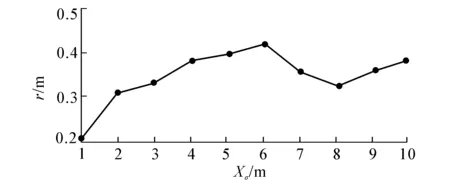
图7 RSSI测距误差对定位精度误差的影响Fig. 7 Effect of RSSI Ranging Error on Positioning Accuracy
由于R-MCL算法是以RSSI模型测距为基础的,因此RSSI测距误差将直接影响到R-MCL算法的定位精度.RSSI测距误差对定位精度误差的影响如图7所示.由图7可知,R-MCL算法的定位精度误差随着RSSI测距误差的增大而增大.仿真实验结果还显示,当参考节点密度减小到一定程度,RSSI测距误差Xσ>10 m时,RSSI测距信息完全不满足滤波条件.此时如果不能增加参考节点,就只能考虑退化为经典MCL算法,或采用其他非测距定位算法.
4 结语
根据制造车间移动资源的定位需求,考虑车间移动资源的移动特点,提出了一种基于改进的RSSI的车间移动节点MCL算法.R-MCL算法的核心思想是利用加权样本集来估计未知节点位置的后验概率密度分布,并不断迭代更新样本集,最后取加权平均值来估计未知节点位置.引入RSSI模型并进行校正处理,能有效地缩小取样区域,使得R-MCL算法在定位精度、收敛速度和计算量等方面的性能均有提升.R-MCL算法是基于测距的,对于定位精度要求较低的应用,将结合无需测距定位算法另开展相关研究.
参考文献:
[1] JAMALABDOLLAHI MOHSEN,ZEKAVAT SEYED.Time of Arrival Estimation in Wireless Sensor Networks via OFDMA[C].2015 IEEE 82nd Vehicular Technology Conference.Boston,MA,USA:IEEE,2015:1-5.
[2] WANG Yue,HO K C.TDOA Source Localization in the Presence of Synchronization Clock Bias and Sensor Poition Erors[J].IEEE Transactions on Signal Processing,2013,61(18):4 532-4 544.
[3] CUI Wei,WU Shaochuan,WANG Yuze.A Gossip-Based AOA Distributed Localization Algorithm for Wireless Sensor Networks[J].Applied Mechanics and Materials,2014,577:841-846.
[4] YAGHOUBI FOROUGH,ABBASFAR ALI-AZAM,MAHAM BEHROUZ.Energy-Efficient RSSI-Based Localization for Wireless Sensor Networks[J].IEEE Communications Letters,2014,18(6):973-976.
[5] BAI Yun,LI Chunming,XUE Yuan.A Centroid Localization Algorithm for Wireless Sensor Networks Based on RSSI[J].Applied Mechanics & Materials,2013,303;197-200.
[6] AGASHE ANIL A,AGASHE AMRITA A,PATIL R S.Evaluation of DV Hop Localization Algorithm in Wireless Sensor Networks[C].2012 International Conference on Advances in Mobile Network,Communication and Its Applications.IEEE,2012:79-82.DOI:10.1109/mncapps.2012.21.
[7] YI JIYOUNG,YANG SUNGWON,CHA HOJUNG.Multi-Hop-Based Monte Carlo Localization for Mobile Sensor Networks[C].2007 4th Annual IEEE Communications Society Conference on Sensor,Mesh and Ad Hoc Communications and Networks.IEEE,2007:162-171.
[8] DIL BRAM JEROEN,DULMAN STEFAN,HAVINGA PAUL.Range-Based Localization in Mobile Sensor Networks[C]∥RÖMER KAY,KARL HOLGER,MATTERN FRIEDEMANN.EWSN'06 Proceedings of the Third European Conference on Wireless Sensor Networks.Berlin,Heidelberg:Springer-Verlag,2006:164-179.
[9] WANG W D,ZHU Q X.RSS-Based Monte Carlo Localization for Mobile Sensor Networks[J].IET Communications,2008,2(5):673-681.
猜你喜欢
智能制造(2021年4期)2021-11-04
科学(2020年3期)2020-01-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
小学生学习指导(中年级)(2018年11期)2018-11-29
制造技术与机床(2018年10期)2018-10-13
农村农业农民·B版(2018年11期)2018-01-28
电子制作(2017年7期)2017-06-05
雷达学报(2017年1期)2017-05-17
中国老区建设(2016年12期)2017-01-15
