弹性梁结构PVDF模态传感边界约束影响分析
2018-07-05 02:58杜敬涛杨武龙
振动工程学报 2018年3期
陈 琪, 杜敬涛, 杨武龙
(哈尔滨工程大学动力与能源工程学院, 黑龙江 哈尔滨 150001)
引 言
弹性梁结构作为一种基本的工程单元广泛应用于船舶结构、航空航天和建筑工程等领域。在外部载荷作用下,梁结构将产生一定振动,尤其是在共振状态下,将会导致结构疲劳甚至破坏失效。在多数情况下,外界激励变化具有宽带变频特征,传统的被动控制难以取得令人满意的振动抑制效果。振动主动控制技术能够有效控制低频振动,同时通过算法调节可以实现对外部激励频率的跟踪,受到各国学者广泛关注。
根据控制策略的不同,弹性结构振动控制可分为振动主动控制(AVC)和结构声有源控制(ASAC)[1-2],其中误差信息传感是主动控制中目标函数有效降低的重要环节。对于弹性梁等轻薄结构,离散式振动传感器如传统的加速度传感器的大量布设会增加结构的附加质量,进而影响结构动力学特性,同时布设成本加大,也给信号处理带来一定困难。随着材料科学与工程的快速发展,PVDF压电薄膜以其优异的传感性能和积分滤波特性,在振动噪声控制领域引起学者的众多研究兴趣[3-9]。分布式PVDF传感器,具有模态过滤特性,实现信号积分,可以有效避免观察溢出和控制溢出。
边界约束刚度对PVDF 模态传感器的设计有重要影响。现有文献多为经典边界条件(简支,固支、自由等),对弹性边界下模态传感器的设计较少。Tanaka等将经典边界条件PVDF模态传感器应用在模态滤波和主动模态控制[10-11];Friswell[12]利用有限元方法设计任意边界条件下模态传感器;Donoso和Bellido[13]使用拓扑优化PVDF压电薄膜电极,复杂电极图形增加了后期信号处理难度。本文提出一种新的设计方法,设计连续分布式PVDF 模态传感器。采用Li[14]和Du[15]提出的改进傅里叶级数法,将弹性梁横向位移展开为傅里叶余弦级数和四项补充项以克服位移函数导数可能出现的不连续问题,结合Rayleigh-Ritz法和模态正交性求解PVDF模态传感器压电方程的模态传感器形状函数以及二次导数。通过调节边界刚度值可以实现经典边界和任意弹性边界约束条件模态传感器设计,数值算例验证本文方法的准确性和有效性。
1 理论模型
考虑任意弹性约束边界条件下Euler-Bernoulli梁结构振动模型,如图1所示。采用横向线位移弹簧和旋转弹簧来模拟梁结构两端弹性边界条件,其中K0(K1)和k0(k1)分别表示左(右)端旋转弹簧和线位移弹簧刚度系数值。通过设置两端弹簧刚度系数可以实现各种边界及其组合,例如经典边界条件简支、固支、自由,可以将相应的边界刚度设置为零或无穷大。此外,通过改变边界弹簧刚度系数来研究PVDF模态传感器形状变化对边界约束的敏感区,进而为PVDF压电薄膜模态传感器的设计与剪裁提供理论依据。

图1 弹性边界支撑条件下梁结构振动模型Fig.1 A beam structural vibration model with elastic boundary supports
粘贴在梁结构表面上PVDF压电薄膜输出电荷Q(t)[16]为
(1)
式中h和hp分别为弹性梁厚度和PVDF压电薄膜厚度;e31为x方向压电常数;w(x,t)为弹性梁横向位移;F(x)为PVDF模态传感器形状函数。
利用模态叠加理论,简谐激励力作用下弹性梁横向位移可写为
(2)
式中am和φm(x)分别为第m阶复模态幅值和振型函数;M为模态截断数;ejωt为简谐振动时间因子。
为了克服任意弹性边界条件下传统傅里叶级数在边界处的微分跳跃问题,将梁结构弯曲振动位移函数采用改进傅里叶级数进行构建,即[15]
B3ξ3(x)+B4ξ4(x)
(3)
式中A0,A1,…,An,B1,B2,B3,B4为未知傅里叶级数系数和相应补充项函数系数;ξ1(x), ξ2(x),ξ3(x),ξ4(x)为克服边界不连续的四项边界光滑辅助函数,详细求解可见参考文献[14-15]。
弹性梁结构振动Lagrangian函数为
L=V-T
(4)
式中V表示系统总势能,包含弹性梁应变势能Vbeam和边界弹簧势能Vspring;T表示梁结构总动能。
(5)
(6)
将所构建的改进傅里叶级数位移展开带入至弹性边界约束梁结构Lagrangian函数,结合Rayleigh-Ritz方法,对所有未知系数求驻值,可以得到系统矩阵方程如下
(K-ω2ρSM)E=0
(7)
式中K为刚度矩阵,M为质量矩阵,E为改进傅里叶级数未知系数向量

(8)
求解式(7)可得弹性梁结构振型函数以及固有频率。
将式(2)代入式(1)得
(9)
将上式改写成矩阵形式
Q(t)=γejωtaP
(10)
PVDF模态传感器形状函数
(11)
式中b是未知系数向量,φ是振型函数的二次导数矩阵。
将式(11)代入式(9),同时结合式(10),可得
Q(t)=γejωtaP=γejωtaRbT
(12)
式中R为积分矩阵,
(13)
在传感器设计过程中,模态灵敏度向量P为预先设定,目标阶模态元素取值为1,其他元素设为0,即
(14)
由此,可以求解得到PVDF模态传感器未知系数
b=(R-1P)T
(15)
将式(15)代入至PVDF模态传感器形状函数表达式(11),同时结合振型函数二次导数,即可得到所需要的模态传感器。
2 数值计算与分析
2.1 经典边界
本节数值计算采用MATLAB语言编程仿真。算例中模型材料为钢,杨氏模量E=200 GPa,密度ρ=7800 kg/m3,梁长0.64 m,宽0.056 m,厚度为0.008 m。经典边界以固支边界为例。固支梁弹性边界刚度K0=K1=k0=k1=1×1012, 模态截断数M=45。计算结果与微分方程数值求解对比,以验证模型的准确性。固支梁前6阶固有频率如表1所示,采用本文模型和数值计算结果吻合良好,说明本文提出的模型具有很高的准确性。通过图2和3固支边界条件下前4阶振型函数和PVDF模态传感器的对比发现,采用本文提出的模型设计PVDF模态传感器是可行的,并且相比复杂方程求解方法,本文方法不需要重新求解方程和程序编写,极大的简化传感器设计流程,降低设计难度。
表1 固支梁前6阶固有频率结果对比
Tab.1 Comparison of the first six natural frequencies for beam with clamped-clamped boundary condition
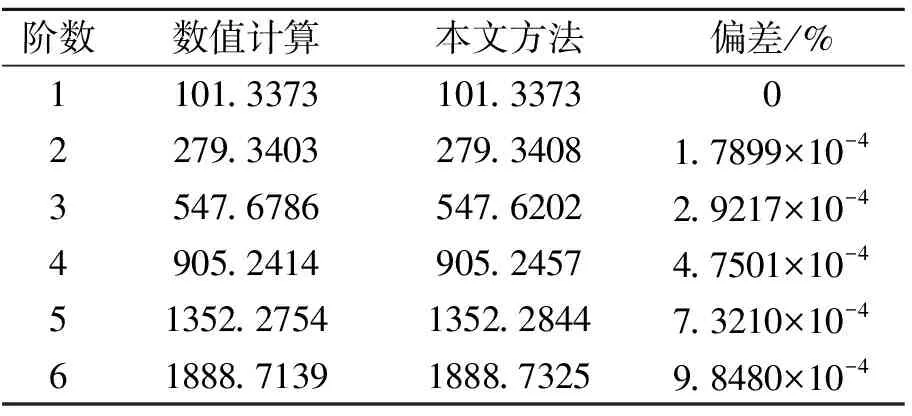
阶数数值计算本文方法偏差/%1101.3373101.337302279.3403279.34081.7899×10-43547.6786547.62022.9217×10-44905.2414905.24574.7501×10-451352.27541352.28447.3210×10-461888.71391888.73259.8480×10-4
2.2 弹性边界
现有的研究大多针对经典边界条件,然而在实际工程应用领域,完全满足经典边界约束情况并不常见,实际工程结构的边界条件往往是弹性边界条件约束。无量纲线性位移弹簧刚度取k0L3=k1L3=1,取3组不同旋转弹簧刚度,弹性梁前5阶无量纲固有频率与文献[17]对比结果如表2所示。由表2可知,采用本文模型计算结果与文献结果基本吻合,说明设计任意弹性边界条件下PVDF模态传感器是可行的,并且具有很高的准确性。

表2 不同旋转弹簧刚度下无量纲固有频率

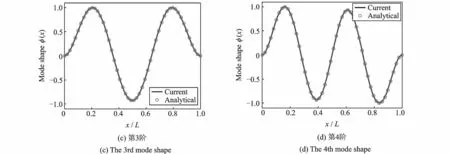
图2 固支梁前4阶模态振型Fig.2 The first four mode shapes for the clamped beam

图3 固支梁前4阶PVDF模态传感器Fig.3 The first four PVDF modal sensor shapes for the clamped beam
图4所示为弹性梁一端固支,另一端边界约束弹簧刚度同时变化下前4阶PVDF模态传感器形状变化曲线图。即边界刚度由固支-固支状态连续变化至固支-自由边界约束。从图中可以明显看出,边界约束刚度的变化对PVDF模态传感器的形状设计产生很大影响。随着边界弹簧刚度的变化,模态传感器形状存在敏感区,在该区域模态形状变化明显。因此,在设计传感器时需要仔细剪裁,以免形状偏差造成模态信息传感误差的增大。实际应用中边界条件较为复杂,很难做到绝对的简支或固支,可以通过模态测试、参数识别等方法获得边界刚度值,设计符合实际情况的模态传感器,进而提高主动控制中误差传感精度。
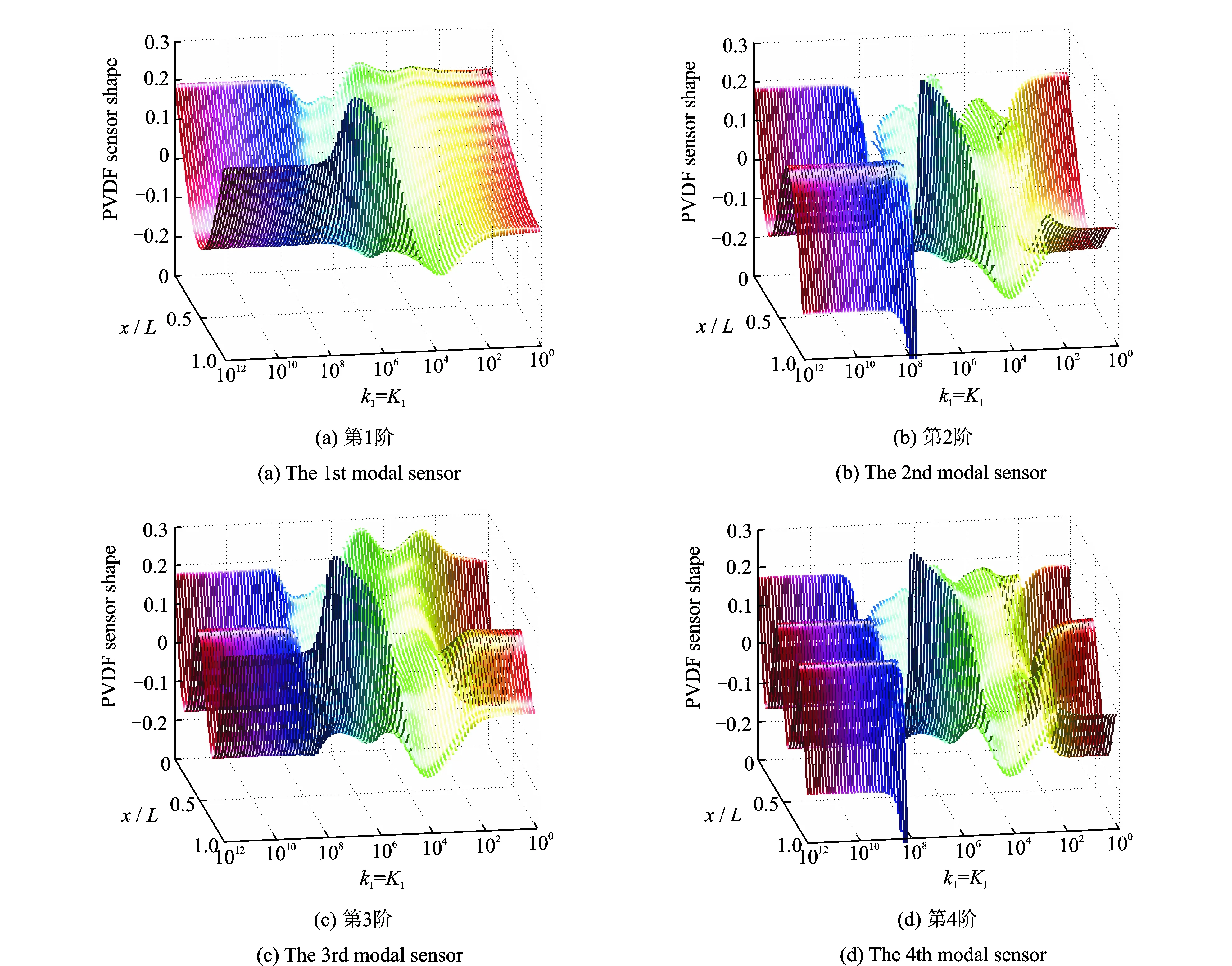
图4 一端固支,另一端旋转弹簧和位移弹簧刚度同时变化下前4阶模态传感器形状变化Fig.4 Variation of the first four modal sensor shapes for a clamped beam with the change of the rotation and translation spring stiffness k1=K1
3 结 论
本文通过将位移函数展开为傅里叶余弦级数和四项补充项,并采用Rayleigh-Ritz方法求解PVDF模态传感器形状函数中的二次导数,首次提出并建立了统一的弹性梁结构PVDF模态传感器设计模型,解决了任意边界条件下模态传感器设计问题。与其他方法不同的是,边界约束刚度发生变化时,本文构建的模型不需要重新求解方程和编写程序。计算结果表明,以固支边界条件为例的经典边界约束,PVDF模态传感器设计吻合良好;边界约束刚度影响分析表明,随着刚度值的变化,存在模态传感器形状变化敏感区,在该区域微小的数值变化将会造成模态信息传感过程中误差的增大。
[1] Fuller C R, Elliott S J, Nelson P A. Active Control of Vibration [M]. London: Academic Press, 1996.
[2] Elliott S J, Johnson M E. Radiation modes and the active control of sound power [J]. Journal of the Acoustic Society of America, 1993, 94(4): 2194—2204.
[3] Hsu C Y, Lin C, Gaul L. Vibration and sound radiation controls of beams using layered modal sensors and actuators [J]. Smart Materials and Structures, 1998, 7(7):446—455.
[4] Friswell M I. On the design of modal actuators and sensors [J]. Journal of Sound and Vibration, 2001, 241(3): 361—372.
[5] 杜敬涛, 靳国永, 杨铁军,等. 基于分布式压电传感器的结构表面体积速度测量实验研究[J]. 振动工程学报, 2008, 21(3):235—240.
Du Jingtao, Jin Guoyong, Yang Tiejun,et al. Experimental study on measurement of structural surface volume velocity based on distributed piezoelectric sensor [J]. Journal of Vibration Engineering, 2008, 21(3):235—240.
[6] 陈克安,尹雪飞.基于近场声压传感的结构声辐射有源控制[J].声学学报, 2005, 30(1): 63—68.
Chen Ke′an, Yin Xuefei. Active control of radiated sound using near field pressure sensing [J]. Acta Acustica, 2005, 30(1):63—68.
[7] Mao Q, Pietrzko S. Design of shaped piezoelectric modal sensor for beam with arbitrary boundary conditions by using Adomian decomposition method [J]. Journal of Sound and Vibration, 2010, 329(11):2068—2082.
[8] 朱 峤, 毛崎波. PVDF压电传感器在实验模态分析中的应用[J]. 压电与声光, 2014(3):393—396.
Zhu Qiao, Mao Qibo. Application of PVDF piezoelectric sensor for the experimental modal analysis [J]. Piezoelectrics and Acoustooptics, 2014,(3):393—396.
[9] 钟海彬, 毛崎波. 通过PVDF阵列设计阶梯梁的模态传感器[J]. 振动与冲击, 2016, 35(9):129—134.
Zhong Haibin, Mao Qibo. Design of modal sensors for a stepped beam based on PVDF array[J]. Journal of Vibration and Shock, 2016, 35(9):129—134.
[10] Tanaka N, Snyder S D, Hansen C H. Distributed parameter modal filtering using smart sensors[J]. Journal of Vibration and Acoustics, 1996, 118(4):630—640.
[11] Tanaka N, Kikushima Y, Fergusson N J. One-dimensional distributed modal sensors and the active modal control for planar structures [J]. Journal of the Acoustical Society of America, 1998, 104(1):217—225.
[12] Friswell M I. On the design of modal actuators and sensors [J]. Journal of Sound and Vibration, 2001, 241(3): 361—372.
[13] Donoso A, Bellido J C. Distributed piezoelectric modal sensors for circular plates [J]. Journal of Sound and Vibration, 2009, 319(1-2):50—57.
[14] Li W L. Free vibrations of beams with general boundary conditions [J]. Journal of Sound and Vibration, 2000, 237(4):709—725.
[15] Du J T, Li W L, Jin G Y, et al. An analytical method for the in-plane vibration analysis of rectangular plates with elastically restrained edges [J]. Journal of Sound and Vibration, 2007, 306(3-5):908—927.
[16] Lee C K, Moon F C, Modal sensors/actuators [J]. Journal of Applied Mechanics, 1990, 57(2): 434—441.
[17] Rao C K, Mirza S. A note on vibrations of generally restrained beams [J]. Journal of Sound and Vibration, 1989, 130(3): 453—465.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2022年3期)2022-05-25
模具制造(2022年1期)2022-02-23
儿童时代·幸福宝宝(2021年11期)2021-12-21
小学科学(学生版)(2021年4期)2021-07-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
现代装饰(2020年4期)2020-05-20
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
证券法律评论(2018年0期)2018-08-31
新高考·高一物理(2016年10期)2017-07-07