
高纬度GNSS网络RTK虚拟基站法研究与实验∗
2018-07-10 09:24陈子耕黄国勇
计算机与数字工程 2018年6期
陈子耕 黄国勇
1 引言
作为目前最主要的全球导航卫星系统(Global Navigation Satellite System,GNSS)高精度定位技术,实时动态差分法(Real Time Kinematic,RTK)技术是基于载波相位观测值的实时动态定位技术,它在测量过程中可以实时提供厘米级精度的三维坐标。流动站距离基准站比较近时,一般可以得到较好的精密数据,但随着流距离的增加,误差的相关性变就变得越来越差,定位精度有所下降,为了确保定位结果仍是厘米级,于是便产生了网络RTK技术。目前,从国内外的资料中查到,RTK技术常用的算法主要有三种:线性内插法、线性组合法和虚拟基站法[1~3]。
云南省昆明市官方数据海拔1891.4m,湖北武汉市官方数据海拔23.3m,两地海拔有很大差别。在以往的文献中,大部分数据采用的都是低海拔数据,文献[8]采用南方某省CORS网三站实验数据得到精准定位;文献[9]采用苏通大桥控制网观测数据利用内差法得到精确定位。文献[10]采用陕西省CORS站数据得到精确定位。以上文献都使用的是海拔较低的数据。本文使用北斗星通公司生产的BDM683接收机接收北斗和GPS信号,并采用网络RTK技术中虚拟基站法对采集到的数据进行处理,利用Matlab2015进行实验仿真,判断高海拔地区定位精度是否比低海拔更加准确。
2 网络RTK技术分析
在工程测量或者是地形勘探中,当流动站距离距离基准站较远时(一般超过180km),两个站间的误差相关性很弱,卫星星历误差,电离层误差,对流层延迟等误差对动态定位的影响将增大,使得定位精度降低。为了解决这些问题,就需要增设一些虚拟基准站,使流动站利用虚拟基准站所提供的信息来大幅度削弱这些偏差所造成的影响[4]。
2.1 载波相位观测方程
GNSS定位中载波相位定位是其中最基本的定位方法之一。其观测方程为

式中,λ是载波相位波长,以米为单位;φij为站星间载波相位;ρij为站星的几何距离;c为光速;δti为时间ti时卫星钟差;N为整周模糊度,以周为单位;dion为电离层延迟;dtrop为对流层延迟;dmp为载波相位测量中的多路径误差;εp是以米为单位的载波相位观测值的噪声误差。
由于GNSS测量中有很多误差的影响,例如卫星钟差,卫星星历误差等,为了大幅度消除这些误差可以采用站间单差、站星双差等方法。其站间单差方程为

式中Δ称为单差算子,i,k分别代表两个基准站。可见,站间单差消除了卫星钟差的影响,同时对电离层、对流层的影响也可以大大削弱[5~6]。
在此观测方程上,再对站星之间做一次差,其站星双差方程为

式中Δ∇称为双差算子,可见在单差观测方程的基础上,又消除了接收机钟差。
2.2 线性组合法
在GNSS网络RTK系统中线性组合法是以单差观测方程为基础的。
如图1所示,假设流动站p位于基准站A、B、C所组成的三角形内,并且距离基准站A最近,以A站位参考基准站进行导。
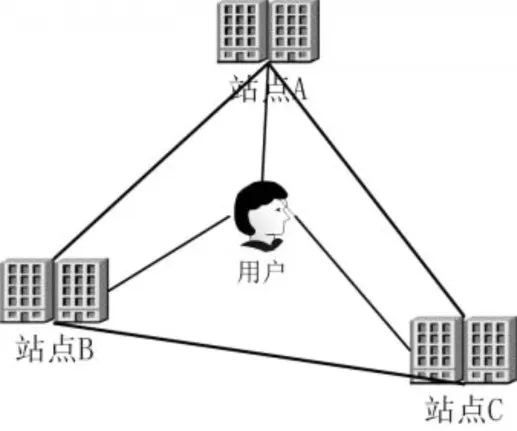
图1 基准站与流动站的位置示意图
设 基 准 站 A、B、C的 WGS-84坐 标 为(XA,XA,XA)、(XB,YB,ZB)、(XC,YC,ZC)流动站用户通过单点定位求得近似坐标为(XP,YP,ZP)。通过软件处理,得到PA、PB、PC的基线向量分别是、、。
设t1时刻流动站P上的载波相位观测值为φP,同一历元上的基准站A、B、C上的载波相位观测值分别是 φA、φB、φC,由式(2)得到流动站 P与基准站A、B、C的站间单差观测方程:

将以上的三个单差观测方程,以下列方式进行线性组合,构成一个新的虚拟观测方程Σ:

式中,aA、aB、aC为系数。
由于轨道误差dρ对单差距离的影响可表示为基线矢量Δ和轨道误差矢量在平面上的分量之间的矢量点积。那么,可以得到卫星误差对距离单差的影响为
为了消除卫星星历的影响,即Δdρ=0,那么由式(5)知aA、aB、aC满足以下条件:

但单从式(6)是无法给出唯一解的,因此,设定一个约束条件:

为了使计算方便,将坐标原点设置在基准站A。假设老坐标系中各点的位置矢量分别是那么在新的坐标系中各点的位置矢量分别为

在新的坐标系中,结合式(6~8)得出新的方程式:

假设,分别是P、B、C三个站点的高斯平面坐标,则式(10)改写成矩阵形式:

那么就可以求出系数aB、aC。
由式(5)乘以波长λ,在消除卫星星历误差、电离层延迟,削减对流层延迟,削弱多路径误差的情况下。可以得出:

为了消除卫星钟差的影响,利用式(3)在站星间做差,可得到虚拟观测值∑的双差观测方程:

此时,引入一个残差项,并定义为

其中,残差项VAB、VAC都可以从A、B、C的坐标以及卫星星历中求得,Δ∇NAB、Δ∇NAC也可以通过初始化或OTF法确定。
将残差项代入双差观测方程,可以得到[7]:

其中,LPA=aBVAB+aCVAC可以根据各基准站的观测数据求得。从式(14)中可以求得流动站P的坐标。
2.3 虚拟参考站基本原理分析
虚拟参考站法的基本原理是在流动站附近建立一个虚拟的基准站,如图2所示。由于虚拟基准站距离流动站很近,一般仅有数米至数十米[5]。

图2 虚拟基准站与流动站的位置示意图
2.4 线性组合法计算虚拟基准站观测值
通过式(14)了解到∑的双差观测值中,卫星误差、电离层延迟、对流层延迟和多路径效应都得到消除或者削弱,省略观测误差项εΔ∇φ,则双差观测方程可以简化为:因此,可以从u站到A站的双差观测方程,得到Δ∇φAu。又因为 Δ∇φAu=Δφu-ΔφA

这样就可以得到虚拟基准站u的单差观测值:

这样数据中心就可以把虚拟基准站u上的单差观测值Δφu与流动站P上的单差观测值ΔφP组成双差观测方程进行动态相对定位,利用相关软件就可以求得流动站P的精确坐标[8-9]。
3 虚拟基站法的仿真实现
3.1 设计思路
在云南昆明选取三个站点(当作基站点)进行连续几天超过10小时的静态定位,所使用仪器为BDM670和BDM683接收机,天线全部使用扼径圈天线,采样间隔15s,将采集到的数据进行平差处理,得到GNSS观测网中基站点的精确坐标。实验是在无云无遮蔽物的条件下进行,接收卫星4~8颗,载波相位数据经过周跳探测,发现并没有周跳发生。
组成如图2所示的GNSS控制网图。将A、B、C视为基准站,P视为流动站。以网络RTK线性组合法数学模型为例,采用事后数据处理的方法,线性组合法计算出流动站相对参考基准站的残差项。利用线性残差项对虚拟双差相位观测值进行改正,求得流动站P的坐标改正数[6~7]。
3.2 虚拟基站法计算坐标与已知坐标比较
利用Matlab进行实验仿真,通过虚拟基站法得出的流动站坐标与其精准坐标的差值,如图3所示。

图3 流动站P的坐标改正数
从图中可以明显看出,虚拟基站法得出的流动站点位坐标与其精确坐标差值在-0.8cm~-1.3cm之间,坐标精度已经相当精确。
3.3 对比低海拔坐标
采用武汉市CORS站的数据,根据已知基准站的精确坐标信息,并将信息代入到虚拟基站法模型中,求出流动站的坐标。得出流动站与其精准坐标的差值,如图4所示。
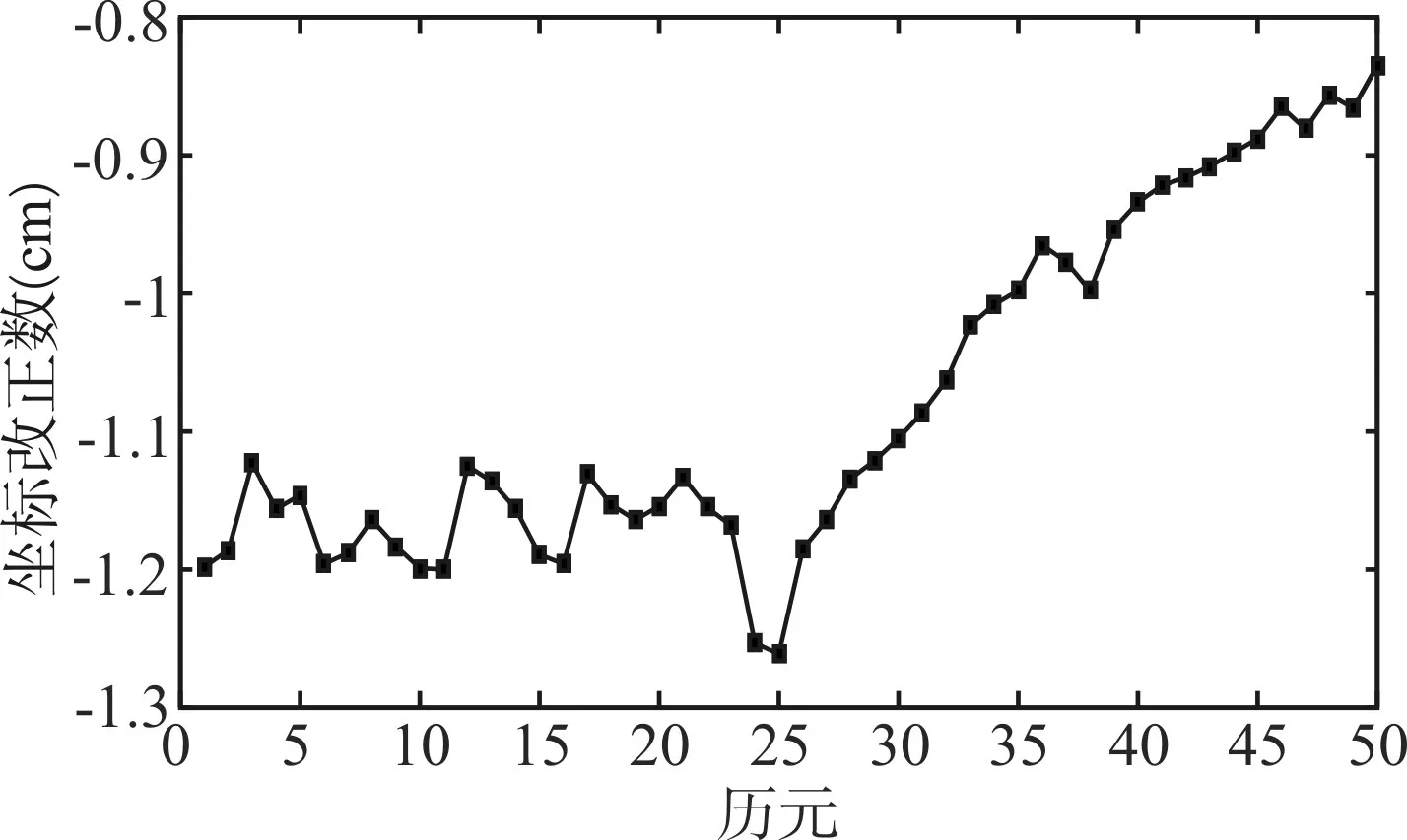
图4 流动站P的坐标改正数
3.4 精度分析
将两地的实验数据进行根据中误差定义:,84坐标系下昆明市流动站位置坐标与精准坐标差( )Δx Δy Δz ,如图5所示。

图5 流动站坐标差值
武汉市流动坐标与精准坐标差(Δ x Δy Δz) ,如图6所示。
求得昆明市点位中误差(其中n=30)为:mx=0.712cm,my=1.4202cm,mz=2.542cm,mΔ=±2.324cm;求得武汉市点位中误差为:mΔ=±5.245cm 。
明显可以看出武汉市中误差比昆明的要大,说明高海拔地区电离层延迟比低海拔要低,再解算残差项时,减弱了其误差性,使得定位精度更加准确。

图6 流动站差值
4 结语
通过对GNSS网络RTK系统中虚拟基站发的模拟计算,得出流动站的坐标与该点精确坐标差值很小,具有较高的精度。并且通过对比实验可以得出在高海拔地区,其电离层延迟较小,空气中水分折射较低,信号接收不容易失真。实验并没有仿真海拔区间对定位精度的影响,需要进一步去完善。
[1]Yuan Yunbin,Ou Jikun.Differential Areas for Differential Stations(DADS):A New Method of Establishing Grid Ionospheric Model[J].Chinese Science Bulletin,2002,47(12):1033-1036.
[2]Wǜbbena G,Bagge A,Seeber G,et al.Reducing Distance Dependent Errors for Real-time Precise DGPSApplications by Establishing Reference Station Networks[C]//ION 96,Kansas City,1996.
[3]张照杰,徐治宝,魏世春,等.GPS网络RTK综合误差线性内插法模拟实验计算[J].测绘地理信息,2008,33(1):14-15.
ZHANGZhaojie,XUZhibao,et al.GPSnetwork RTK integrated error linear interpolation simulation experiment calculation[J].Mapping Geographic Information,2008,33(1):14-15.
[4]吴北平.GPS网络RTK定位原理与数学模型研究[D].武汉:中国地质大学(武汉),2003.
WU Beiping.Research on RTK positioning principle and mathematical model of GPS network[D].Wuhan:China University of Geosciences(Wuhan),2003.
[5]祝会忠,徐爱功,高星伟,等.长距离GNSS网络RTK算法研究[J].测绘科学,2014,39(5):80-83.
ZHU Huizhong,XU Aigong,GAO Xingwei.Research on RTK algorithm for long distance GNSS network[J].Science of Surveying and Mapping,2014,39(5):80-83.
[6]卫柳艳.GPS网络RTK系统的算法及定位精度研究[D].南京:河海大学,2006.
WEILiuyan.GPSnetwork RTK system algorithm and positioning accuracy[D].Nanjing:Hohai University,2006.
[7]高星伟,陈锐志,赵春梅.网络RTK算法研究与实验[J].武 汉 大 学 学 报 信 息 科 学 版 ,2009,34(11):1350-1353.
GAO Xingwei,CHEN Ruizhi,ZHAO Chunmei.Research and experiment of network RTK algorithm[J].Journal of Wuhan University Information Science Edition,2009,34(11):1350-1353.
[8]高星伟,刘经南,葛茂荣.网络RTK基准站间基线单历元模糊度搜索方法[J].测绘学报,2002,31(4):305-309.
GAO Xingwei,LIU Jingnan,GE Maorong.Network RTK reference station between the baseline single epoch ambiguity search method[J].Journal of Surveying and mapping,2002,31(4):305-309.
[9]卫柳艳,岳东杰.GPS网络RTK系统的内插算法研究[J].现代测绘,2008,31(5):7-9.
WEI Liuyan,YUE Dongjie.Research on interpolatin algorithm of GPSnetwork RTK system[J].Modern Surveying and Mapping,2008,31(5):7-9.
[10]张永奇,林卓,丁晓光,等.基于CORS系统的网络RTK技术原理及应用[J].测绘标准化,2014,30(2):9-11.
ZHANG Yongqi,LIN Zhuo,DING Xiaoguang.Principle and application of network RTK technology based on CORSsystem[J].Standardization of Surveying and Mapping,2014,30(2):9-11.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
好日子(下旬)(2020年6期)2020-08-04
雷达学报(2018年5期)2018-12-05
劳动保护(2018年8期)2018-09-12
电机与控制学报(2018年9期)2018-05-14
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
移动通信(2017年11期)2017-06-20
读者·校园版(2015年7期)2015-05-14
