飞机电动机轮设计及电动滑行系统仿真研究
2018-07-17 09:51李开伟王立文
中国机械工程 2018年13期
张 威 李开伟 王 伟 王立文
1.中国民航大学航空工程学院,天津,300300 2.中国民航航空地面特种设备研究基地,天津,300300
0 引言
目前飞机的起飞流程是采用牵引车将飞机从停机坪或航站楼的泊位推出,牵引飞机到达滑行道端,飞机启动发动机进入滑行道,到达飞机跑道端部等待,在得到指令后,滑入跑道,开始起飞和爬升[1-3]。在此过程中,牵引飞机所需要的时间长、燃油消耗高、噪声大且排放污染物多。同时,飞机在滑行和等待阶段,发动机工作效率低,进而会影响发动机的使用寿命[4]。为了减少运输成本、噪声污染以及温室气体排放,人们提出逐渐向“多电飞机”直至“全电飞机”发展的计划[5-7]。其中的一种概念是在飞机前起落架或主起落架的机轮轮毂上安装一套电动机传动装置,来代替牵引车完成飞机的推出、前行及转弯功能,无需启动飞机发动机,该系统被称为飞机地面电动滑行系统(electric taxiing system,ETS)[2,8]。据测算,ETS 系统可使每架飞机每年节约燃油费多达20万美元,节省燃油130 t,节省滑行时间2 min,每次飞行班次降低4%的燃油消耗,减少75%的温室气体和50%的氮氧化合物排放[9]。Gibraltar-based公司首先提出了电动滑行的概念,称之为“Wheel-Tug”[10];霍尼韦尔宇航公司和赛峰公司在巴黎航展上进行了电动绿色滑行系统(electric green taxiing system,EGTS)演示,EGTS利用飞机上经过改造后的、更大功率的辅助动力装置(auxiliary power unit,APU)来驱动安装在主起落架上的电机[11]。而在国内,这一领域的研究才刚刚起步,系统理论研究和结构设计还不完善。
总体来讲,飞机ETS系统主要采用前机轮驱动和主机轮驱动两种形式。HEINRICH等[12]通过计算得出,在飞机主起落架上应用ETS能够使用更大的牵引力来驱动和推动飞机滑行,主机轮最大牵引力比前机轮最大牵引力大4倍。TEO等[1]指出,考虑到飞机重心位置、跑道摩擦因数以及坡度影响,采用前机轮驱动方案的中短途飞机比采用主机轮驱动的飞机更难驱动。对于电动机轮的设计,有以下两种:①将机轮改造设计成轮毂电机形式,内置行星减速机构,直接驱动[13-15];②安装电机,通过减速装置驱动机轮,对机轮改造较小[16]。相比而言,前者比后者更复杂,对机轮改造需要更大的技术突破,且电机的可行性和电磁设计尚处于讨论中[9]。
目前对飞机电动滑行系统的研究主要集中在燃油消耗、成本分析和环保效益方面,而对系统传动、起落架改造及电机安装等方面的研究甚少,因此,本文对飞机电动滑行系统原理及组成展开研究,采用主机轮驱动,提出传动方案,在主起落架模型原有的基础上进行部分改造,重新设计电动机轮驱动结构和安装方式。通过建立系统数学模型,确定系统传动参数,并选用永磁同步电动机,以空间矢量控制技术为基础,建立MATLAB/Simulink仿真模型,分析验证系统的滑行性能。
1 飞机ETS系统组成及传动设计
1.1 ETS系统组成
飞机电动滑行系统(ETS)的组成主要包括:ETS控制器,飞行员交互式控制单元,驱动轮,功率转换器,APU发电机。飞行员在驾驶舱内启动APU,带动发电机给系统供电。然后启动ETS系统,飞行员将ETS系统控制手柄置于前进或后退挡位,即向ETS系统控制中心下达指令,控制中心将指令转化成相应电子信号,传递给电机控制器。电机控制器通过变频和逆变器,控制主起落架上的驱动电机正转或反转,再通过传动机构将运动和力传递到机轮,控制机轮转动,从而实现飞机向前或向后滑行。此外,机轮上装有传感器,可实时反馈机轮上作用的转速及转矩[17-19]。ETS系统组成结构框图见图1。
1.2 ETS系统主起落架改造
在保证主起落架主体结构不变的情况下,遵循精简有效原则,对主起落架进行部分改造。飞机ETS系统的电机及传动机构安装在主起落架两个机轮之间,电机通过一行星轮减速器与外侧机轮连接;行星轮减速器中心悬挂安装在机轮轴上,输入端与电机轴齿轮啮合,输出端与机轮轴同心;机轮轮毂上布置法兰,其余液压刹车系统不变。电动机轮传动结构原理见图2,主起落架电动机轮模型见图3。

图1 飞机地面电动滑行系统组成结构框图Fig.1 Aircraft ETSblock diagram
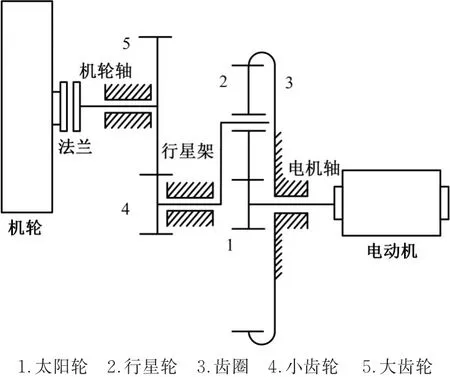
图2 电动机轮传动结构原理简图Fig.2 Electric wheel transmission structure diagram
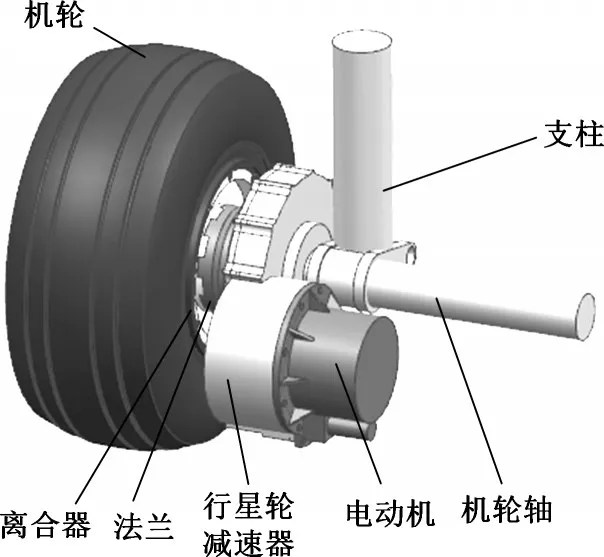
图3 飞机主起落架电动机轮模型Fig.3 Aircraft main landing gear electric wheel model
通常飞机在机场跑道即将起飞或刚着陆时,飞机时速可达200 km/h[5]。为了避免ETS传动机构受到损害,需在电机和机轮轮毂间加装一离合器。离合器在机轮高速运转时,将电机与机轮分开,起到保护作用。
2 飞机ETS系统数学模型设计
2.1 飞机地面滑行最小牵引力
当飞机从停机坪向跑道滑行时,轮胎表面会受到路面滚动摩擦力影响。为保证飞机顺利滑行,飞机牵引力必须要大于滚动摩擦力,故飞机地面滑行最小牵引力[12]

式中,crr为飞机轮胎与干燥混凝土路面滚动摩擦因数;m为飞机最大起飞质量和加装电机装置后的质量之和;g为重力加速度。
2.2 飞机地面滑行最大牵引力
飞机滑行时牵引力还必须要小于地面附着力,否则轮胎会打滑,影响飞机滑行安全,故整个主起落架上机轮滑行最大牵引力[12]

式中,wd为飞机主起落架质量分布因数;μ为轮胎与跑道地面的最大静摩擦因数。
2.3 飞机地面滑行受力分析
研究飞机在地面滑行时的受力情况,可以类比汽车动力学分析模型[13]。假设飞机在机场干燥混凝土跑道地面向前滑行,此时发动机处于关闭状态,只受到飞机纵向的空气阻力,横向受力不计,则飞机受力情况见图4[20]。
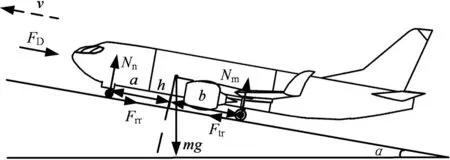
图4 飞机在跑道地面滑行受力情况Fig.4 Forces acting on an aircraft taxiing
飞机地面滑行水平方向的力平衡方程为
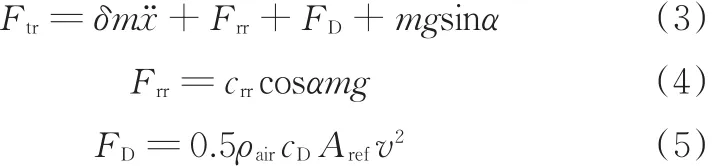
式中,Ftr为飞机滑行方向驱动力;FD为飞机滑行时所受空气阻力;Frr为滚动摩擦力;Nn和Nm分别为前机轮和主机轮支反力;ẍ为航向加速度;δ为转动惯量因数;α为跑道地面坡度角;ρair为飞机滑行时周围的空气密度;Aref为飞机迎风面积;cD为阻力系数;v为飞机地面滑行速度。
航向垂直方向的力平衡方程为

式中,a、b分别为飞机航向水平方向上前起落架和主起落架距重心距离;h为飞机重心高度。
2.4 机轮转矩与系统功率
飞机滑行时主起落架上机轮转矩


式中,TW为单个机轮最大输入转矩;TM为单个电机最大输出转矩;r为主起落架上机轮轮毂半径;k为电机与机轮间减速器传动比。

式中,PETS为ETS系统输出功率;PM为电机最大输出功率;PES为ETS系统能源最大输出功率;n为主起落架上电机数目;ηGB为电机与机轮间减速器传动效率;ηMI为电机控制器工作效率。
电机转速和机轮转速分别为

3 主起落架电动滑行系统建模仿真
系统仿真中选择空客A 321飞机为仿真对象,查阅相关资料[21-22],ETS系统仿真数据见表1。
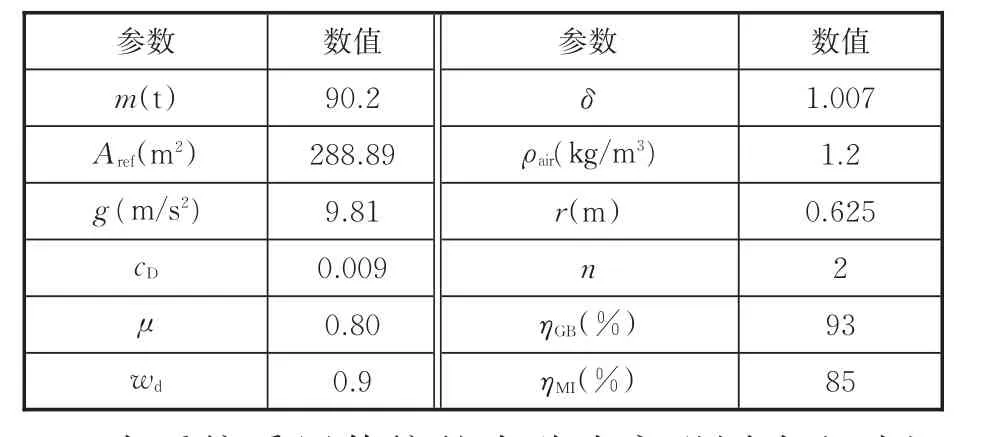
表1 ETS系统仿真数据Tab.1 ETSSimulation data
本系统采用传统的表贴式永磁同步电动机(PMSM)作为动力源,经坐标变换、空间矢量脉宽调制、三相正弦电压逆变以及电机检测反馈等环节进行控制[23-24],其控制结构见图5。图5中,d、q、α、β、a、b、c均为电机矢量控制的计算变量。

图5 PMSM矢量控制结构模型Fig.5 PMSM vector control structure model
双电机采用独立驱动[25],建立MATLAB/Simulink仿真模型,见图6。
在图6系统仿真中,考虑电机转矩变化引起的机械特性影响,系统模型转矩输入值的最小值是通过加速踏板输入系统期望转矩值与电机转速时刻所对应的的极限转矩值比较得出。其中,加速踏板所对应的期望转矩值为加速踏板输入量值与电机极限转矩值的乘积,系统转矩输入控制框图见图7。

图6 飞机地面电动滑行系统仿真模型Fig.6 Aircraft ETSSimulink simulation model
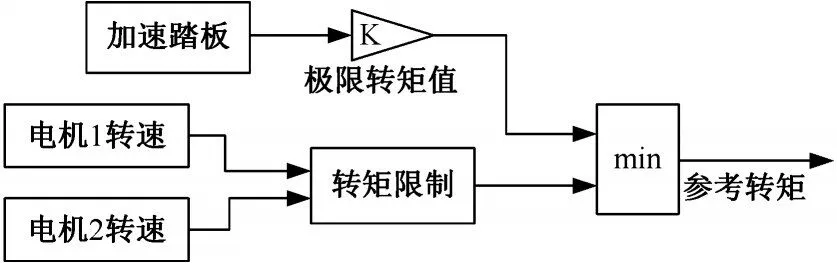
图7 系统转矩输入控制Fig.7 System torque input control
另外,飞机地面电动滑行系统主起落架上的动力由行星轮和齿轮组成的减速器传递,飞机滑行动力学仿真模型见图8。
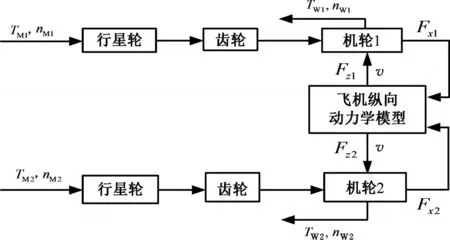
图8 飞机ETS系统传动机构动力学仿真模型Fig.8 Aircraft ETStransmission mechanism dynamics simulation model
飞机地面电动滑行系统模型中的输入信号为ap,其数值介于0和1之间,表示飞行员加速踏板位置深度,通过改变ap的不同数值来控制输入转矩和电压大小。仿真过程中的飞机质量考虑飞机最大起飞质量和额外增加的电机质量,中间通过行星轮系减速器将动力传递到机轮,从而使飞机滑行。图9~图12分别为当飞机加速踏板位置输入ap为 0.4、0.5、0.7、0.8时,飞机滑行速度、电机转速、电机转矩及机轮转矩的仿真结果。

图9 飞机滑行速度仿真结果Fig.9 Simulation results of aircraft taxiing velocity

图10 电机转速仿真结果Fig.10 Simulation results of motor speed

图11 电机转矩仿真结果Fig.11 Simulation results of motor torque
4 结果分析
从仿真结果可以看出,图9和图10中飞机由2个主起落架上的电动机驱动,滑行速度从0逐步增大并趋于平稳,2个永磁同步电机由于物理参数相同,且假设飞机做直线行驶,故其转速曲线变化相同,与飞机滑行速度曲线总体变化趋势一致;图11和图12中飞机在静止启动时,电机和机轮启动转矩达到最大值,之后随着飞机滑行速度的增大而逐渐减小,符合电机的机械特性曲线变化规律。在4个不同踏板位置输入量参数中,飞机滑行速度、电机转速、电机转矩及机轮转矩的变化规律一致,加速踏板位置输入增大,飞机最大滑行速度也相应增大,类似于电动汽车的滑行性能。在90 s内,当ap=0.8时,飞机加速完成后的最终滑行速度为33.6 km/h;当ap=0.7时,飞机最终滑行速度为31.9 km/h;当ap=0.5时,飞机最终滑行速度为25.3 km/h;当ap=0.4时,飞机最终滑行速度为22.7 km/h;这表明本研究设计的模型能根据飞行员控制不同的加速踏板位置,从而控制飞机的滑行速度,系统操作合理。考虑到大型机场具有很长的滑行距离,应用电动滑行系统的主要问题之一是滑行速度小,将会引起后面飞机的长时间等待,进而引起飞机延误或错过起飞时点。另外,WheelTug系统飞机的最大滑行速度为18.5 km/h,EGTS系统飞机的最大滑行速度为37 km/h[8],相比而言,本研究模型的滑行速度能满足机场要求。

图12 机轮转矩仿真结果Fig.12 Simulation results of wheel torque
5 结语
飞机地面电动滑行的应用能最大程度减少飞机发动机在地面的使用时间,减少尾气排放和燃油消耗,以及减少大量噪声对机场方面的影响,对发展民用和军用“多电飞机”乃至“全电飞机”都具有一定意义。本文通过对飞机地面电动滑行系统原理及组成进行分析,针对电动机轮的设计,提出飞机主起落架改造方案,建立电动滑行系统数学模型,并对系统滑行性能进行仿真分析。仿真结果符合实际需求,传动方案理论上合理可行。飞机电动机轮的设计是在主起落架原有基础上,加装一套电传动装置,保证了主起落架结构的完整性,为实现飞机电动滑行提供新的方案。另外,也为成本效益分析、能源供应以及再生能量效率分析等相关后续研究打下基础。
猜你喜欢
低温与特气(2022年2期)2022-11-26
物流技术与应用(2022年8期)2022-08-26
中原商报·科教研究(2021年6期)2021-05-13
哈尔滨轴承(2021年4期)2021-03-08
百科探秘·航空航天(2020年8期)2020-07-29
物流技术与应用(2020年4期)2020-05-06
军民两用技术与产品(2019年12期)2020-01-19
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
民用飞机设计与研究(2016年4期)2016-01-06