
一种全自动下车支腿调平系统
2018-07-24 03:45苏亮熊忆段娟香艾国栋
专用汽车 2018年7期
苏亮 熊忆 段娟香 艾国栋
长沙中联消防机械有限公司 湖南长沙 410300
1 前言
在分秒必争的火灾救援现场,消防设备快速进入工作就绪状态,对于提升救援效率,减少损失,意义重大。装备一键式自动操作系统能够减少操作步骤,同时,高效、稳定的自动操作过程也可以节省人工操作的耗时,减少动作完成时间,从而提升整体功能的易用性、快速性,具有积极的意义。
2 现有车辆下车支腿调平系统
目前,现有的车辆下车支腿调平方式有两种,手动调平方式和自动调平方式。其中,手动调平的方式耗时长,依赖熟练的操作人员,不利于提高消防作业效率。
自动调平的方式也有如下问题:
a.车身本身存在变形,调平结束后,下车实际平整度得不到保证;
b.在不同的路面情况下,自动调平适应能力弱,有可能出现垂直油缸到底后无法结束调平的情况;
c.调平结束后,四个垂直支腿虽然触地,但是各支腿如果只是触地,而不是均衡承受车身质量,在上装转动时,质心变化会导致各支腿受力的变化,弱支撑支腿很可能因为受力进一步减小而离地,造成虚腿的现象,影响整车安全性。
针对上述诸多问题,笔者设计开发了一种全面优化的下车自动调平控制系统,通过改进检测方式及判定条件,运用分步调节结合模糊PID控制的调平方法,并结合支腿反力的修正调节,全方位地提升自动调平的实际效果,通过对试验车调试与测试结果分析,验证了该系统的可靠性。
3 自动调平系统的构成
常见的支腿设计结构如图1所示,自动调平系统通过对支腿的伸出、收回状态以及车辆的倾斜程度进行实时检测,用控制器控制各支腿阀的动作,并对调平结果进行自动判定。
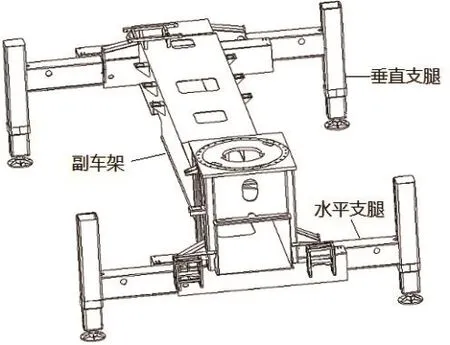
图1 常见支腿结构
整个控制系统的构架如图2所示。

图2 下车自动调平控制系统框图
系统为了解决车身形变造成倾角检测数据不准确的问题,在车身前侧增加单轴倾角传感器,如图3(b)中X2与X1一起,用于检测左右侧车身倾斜角度。车辆前侧X方向调平参考X2数据,后侧X方向上的调平参考X1数据,由于两个传感器分别安装在副车架距离支腿很近的位置,检测数据受车架变形扭曲的影响很小,确保了数据的准确性,从而规避了车架变形带来的倾角误差,保证了调平后支腿的平整度。
同时,将压力传感器替代接近开关,作为垂直支腿伸出到位的检测方法,如图3(b)中支腿末端四个黑色区域所示,压力传感器不仅可以判定支腿是否触地,同时也能够检测支腿的受力大小。本系统利用压力信号,在自动调平角度误差满足判定条件后,再对受力最小的弱支撑腿实施微调的伸出控制,提高弱支撑支腿的受力数据。此方式对车身角度基本无影响,却能够有效地改善三点强支撑的情况,为上装的动作提供了稳定的支撑。

图3 双倾角传感器及反力检测设计
4 自动调平系统的控制策略
系统采用分步骤的调平方式,将自动调平分为五步,步骤如下:第一步,伸水平支腿,将支腿伸出到位;第二步,伸垂直支腿,将支腿伸出触地;第三步,粗调平,快速通过倾角传感器的X轴和Y轴来调节其中两或三个支腿实现车身的基本水平;第四步,轮胎离地,撑起所有的支腿,直到轮胎离地;第五步,精调平,通过倾角传感器的X轴和Y轴来调节其中的三个或者两个支腿,将车身精准调整至设定水平。
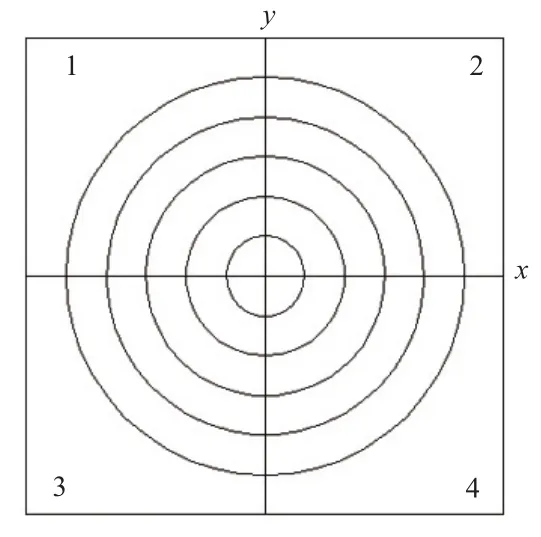
图4 车身倾斜四区间
如图4所示,通过分析双轴倾角传感器的X轴和Y轴的输入信号可以把车身平面分为四个区间,如当检测到X<0且Y>0时,程序判断车身向1区倾斜,以此定义后续流程中X、Y轴方向的正负。本方案中,定义前高后低为Y轴正向,右高左低为X轴正向,反之为负向。
整个车身调平的过程包括伸水平支腿、伸垂直支腿、粗调平、轮胎离地、精调平,整体工作流程如图5所示。
各垂直支腿触地后,都将停止动作等待所有支腿触地,当系统检测到水平支腿、垂直支腿伸出到位后,开始执行粗调平。调平过程中,任意一个支腿的伸出都将影响X轴和Y轴方向的角度数据,同时按照图4中所表述的倾斜区间判定车身所处区间,对四个支腿进行单独控制。
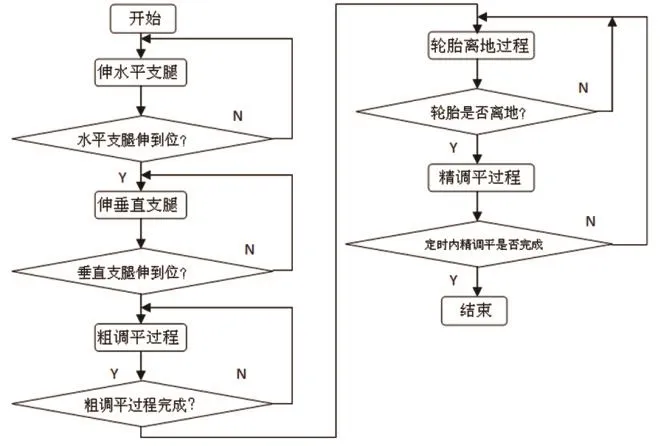
图5 调平控制流程
由于四个支腿中任一支腿的动作都将对车身角度产生影响,从而影响其他三个支腿的输出数据,因此,四个支腿同时动作的属性决定了彼此之间互为干扰,而单纯的PID控制器依赖精确的数学模型,在数学模型不精确的情况下,将降低系统控制性能,同时无法很好地控制超调[1]。使用过程中,往往会将支腿撑得太高导致油缸达到行程极限无法完成调平。针对这种情况,引入模糊PID控制算法。模糊控制是基于模糊集理论、模糊语言和模糊逻辑推理的一种智能控制方法。模糊PID控制是将模糊理论应用到PID控制系统中,从而构成模糊PID控制器[2],用于控制调平过程中出现过调的现象,同时保证调平的快速性。在粗调平和精调平的过程中,应用模糊PID调节方法,并设置不同的误差允许值。
同时,在轮胎离地过程中,为了保证轮胎离地信号,保证每一个支腿至少以一定的速度撑起,精调平时,将下车调平的允许误差加入判断,允许误差设置为±0.5°,只有当两个轴向的误差都小于允许误差,才能判定下车调平,最后检测四个支腿反力数据,对支腿反力最小的支腿进行单腿伸出控制。
5 试验分析
以53 m云梯消防车作为试验对象,并采集下车调平相关的倾角及垂直支腿阀开口等数据,通过人工操作、常规自动调平、改进自动调平的方式采样数据并进行效果的比对。试验用53 m云梯消防车如图6所示。

图6 试验用53 m云梯消防车
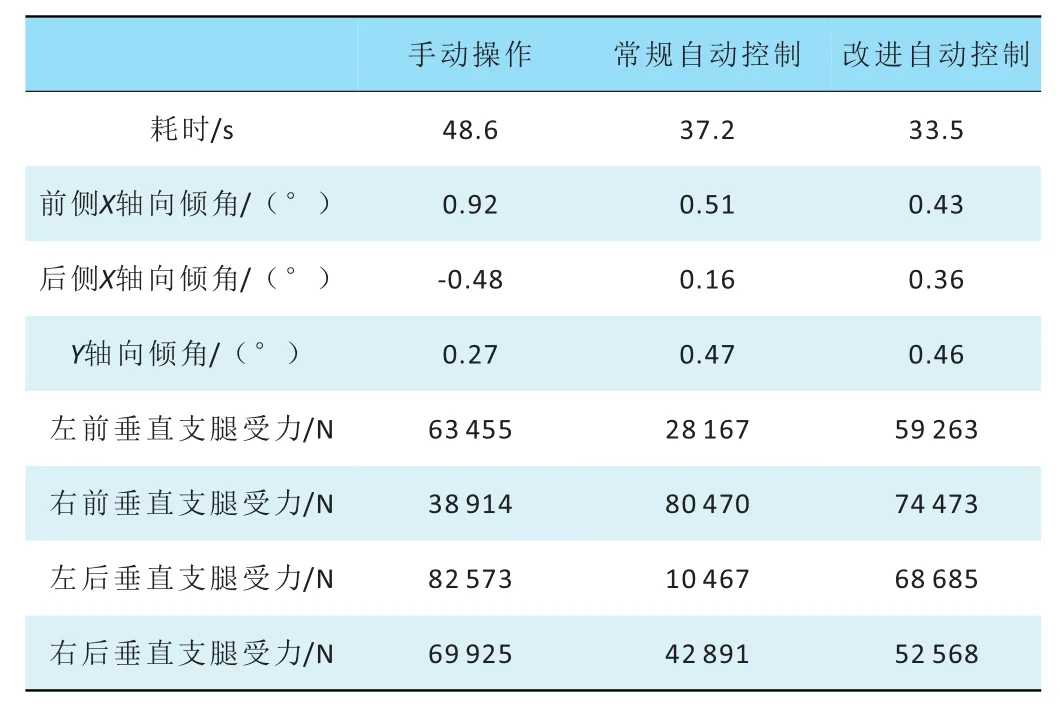
表1 第一组试验对比数据

表2 第二组试验对比数据
从两组试验的对比数据如表1、2所示, 从表中可以看出,手动操作模式通过人推动机械手柄杆操作支腿动作,由于不能同时自如地操控几个支腿,调平耗时较长,且调平后整车平整度无法保证,为了保证精度则需要更长的调整时间。常规自动控制模式第一组调平完成后,单个支腿弱支撑的现象明显,对上装的动态稳定性支持较弱;第二组测试时出现了调平不成功的现象,暴露了控制算法的缺陷,可靠性较低。而改进的自动调平模式在时间、精度、受力均匀性上都有很好的效果。
再对比两种自动调平的过程,如图7所示。为了方便数据比对,实现时间轴同步,将倾角数据及支腿PWM值列入同一张表中,为了方便观察,仅选取一组X轴数据,观察调平角度变化。图7中,X、Y轴零点在1 000附近,视为调平目标值。从图7可以看出,在调平开始时,水平支腿伸出引发质心的变化导致X、Y轴数据的波动;12 s左右,水平支腿伸出到位,四个垂直支腿伸出;25 s左右,支腿触地开始调平,后续调平过程中,X轴方向出现过调的现象,四个支腿控制电流波动较大。

图7 常规自动调平数据
图8显示采用模糊PID控制方法的调平,图中后段可以看出,整个车身撑起过程稳定,粗调平、精调平过程中各支腿控制电流曲线平滑,X、Y轴数据能够快速趋近零点值,且相比常规调平方式,耗时更短。
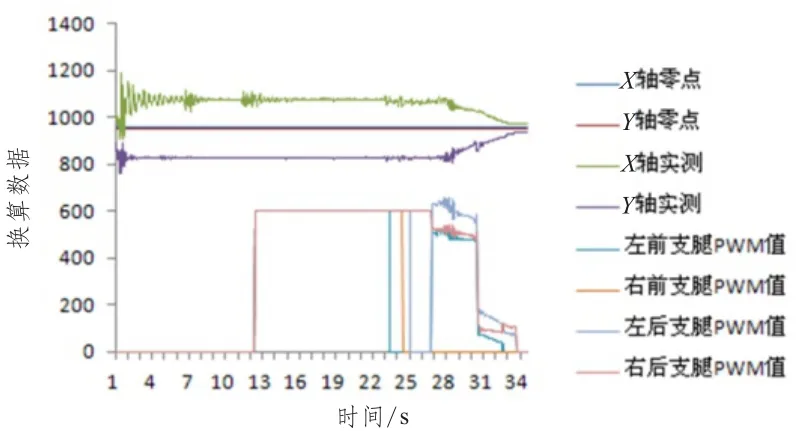
图8 改进算法控制调平数据
6 结语
本文设计了一种全面的支腿全自动调平控制系统,设置两个倾角传感器检测车身角度,解决了车身形变导致检测误差对调平精度的影响;采用分步式模糊PID调平控制策略,将整个过程分成五步,在垂直支腿调平过程中,逐级将车辆调整至目标状态,最后,在不影响车身角度的前提下,辅助以支腿反力数据,对弱支撑垂直支腿进行单独微调整。相较于常规方法,本系统具备调平实际精度更高、调整时间更短、过程平稳、地面条件适应能力更强、一次调平成功率更高、支撑更可靠等多种优点。同时,本方案并不局限于消防车的应用场景,可以满足任何需要配备自动调平功能的支撑平台,具备较高的应用价值。
猜你喜欢
临床骨科杂志(2022年4期)2022-11-24
科技与创新(2022年10期)2022-05-27
专用汽车(2021年12期)2021-12-24
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
党的生活(黑龙江)(2017年10期)2017-11-09
体育时空·上半月(2017年4期)2017-05-05
东西南北(2017年1期)2017-02-22
建材发展导向(2016年2期)2016-05-19
速读·中旬(2015年10期)2015-10-21
