
全自动移栽机送取分装置空间协调设计与试验研究
2018-08-10 10:58毛罕平胡建平韩绿化
农机化研究 2018年9期
徐 飞 ,毛罕平,胡建平,韩绿化
(江苏大学 现代农业装备与技术省部共建教育部重点实验室,江苏 镇江 212013)
0 引言
移栽可使得蔬菜有效避开育苗期冻害、干旱等自然灾害,并充分利用光热资源,具有对气候补偿和帮助作物提早成熟及增产的作用。近年来,随着全自动移栽机的发展,移栽带来的巨大的经济效益和社会效益日益突出[1-2]。目前,我国全自动移栽多为自主研制的移栽样机和根据国外移栽方案改进设计的移栽样机,大部分全自动移栽机都还不成熟,仍存在这样或那样一些问题。其中,一部分主要体现为移栽各环节空间关系不协调造成的各移栽环节移栽成功率低,从而导致整体移栽质量差,不能投入生产供广大农户使用[3-6];而要保证移栽各环节的移栽成功率,关键是如何找出影响相互接触的执行机构的关键因素,并确定其最佳值。
针对本课题组研制的乘坐式全自动移栽机的送苗、取苗、分苗3个关键移栽环节进行空间关系协调设计。通过分析找出影响取苗及投苗成功率的关键影响因素,并通过试验的方法确定关键影响因素在最佳移栽成功下的最佳值,从而实现移栽送取分环节间的空间关系协调设计,保证本乘坐式全自动移栽机的移栽质量。
1 整机结构及工作原理
1.1 整机结构
乘坐式全自动移栽机主要由动力底盘、送苗装置、取苗装置、分苗装置、导苗机构、栽植装置、覆土装置、升降机构、控制系统和气源装置等功能部件组成,如图1所示。
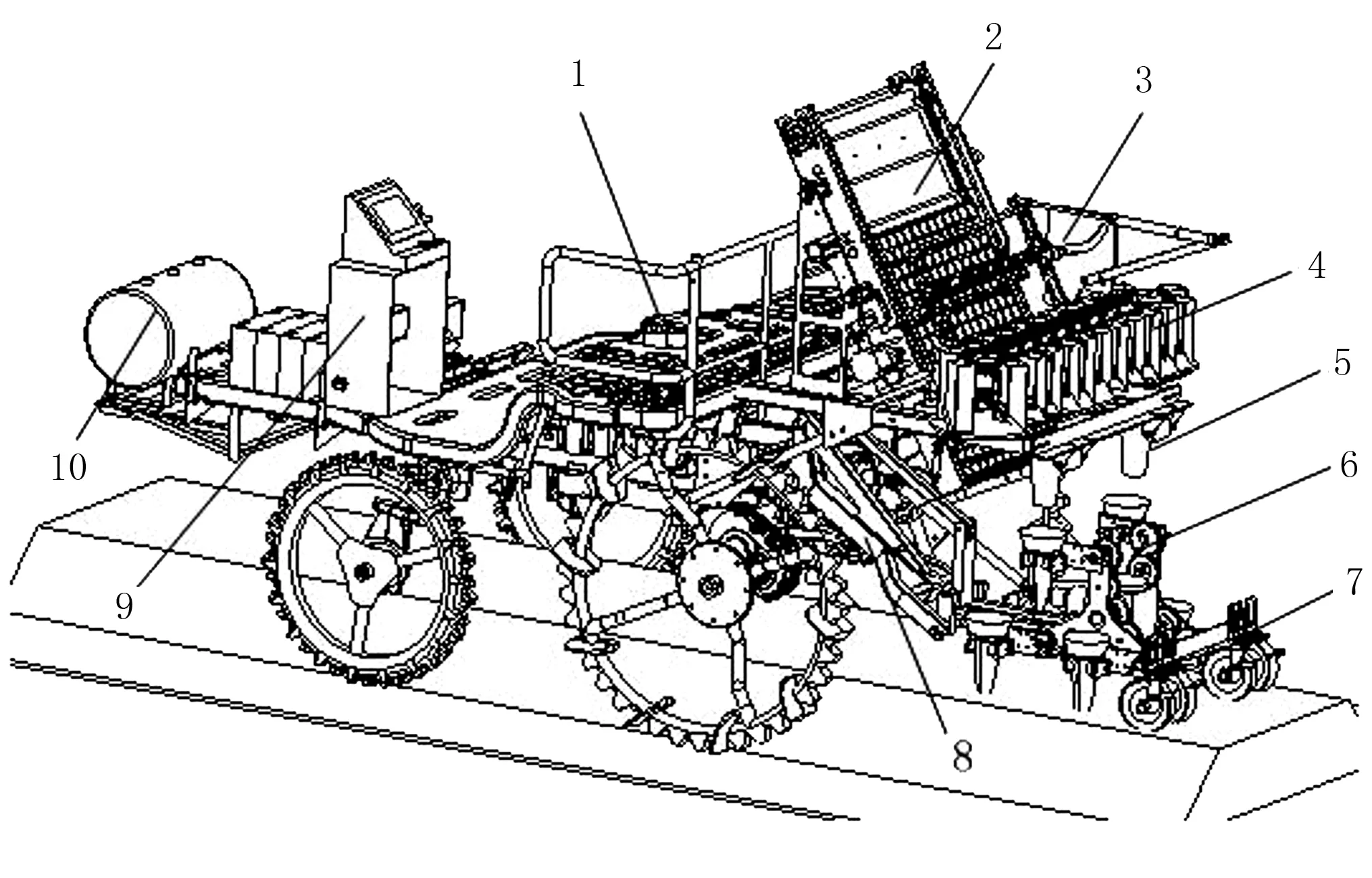
1.动力底盘 2.送苗装置 3.取苗装置 4.分苗装置 5.导苗机构 6.栽植装置 7.覆土装置 8.升降机构 9.控制系统 10.气源装置
1.2 工作原理
移栽作业时,放秧人员将穴盘苗放置在送苗装置上,启动车载触摸屏,通过PLC控制系统控制送苗装置上的步进电机驱动苗盘至指定取苗位置;取苗装置会沿固定滑槽轨迹运动至指定取苗位置,在此过程中,取苗爪会按设定的时序动作取出钵苗,并沿着滑槽轨迹返回分苗装置上方准备投苗;当分苗装置上的传感器检测到信号时,反馈信息,此时第1个取苗爪开始投苗,并依此间隔投苗,直至6个取苗爪全部投完;落入苗杯中的穴盘苗在输送链的输送下,旋转至导苗筒上方,此时苗杯底盖打开,穴盘苗落入导苗筒中,经导苗筒喂入栽植器中,由栽植装置完成栽植工作,并经覆土和镇压,依次重复运动可实现两行穴盘苗的送苗、取苗、分苗、导苗和栽植的连续作业过程。
2 送取分装置空间关系协调设计
2.1 空间协调基本要求
1)根据送苗装置与取苗装置的工作原理关系,本文认为两者空间协调配合应满足以下几点基本要求:
(1)取苗时,取苗爪应处于被取钵苗穴孔的中心位置,与穴孔边缘上下居中,左右居中[8],避免取苗时,取苗爪因靠近穴孔一侧造成钵体损伤而降低取苗质量。
(2)取苗工作过程中,取苗爪应垂直插入被取钵苗孔穴中,避免取苗时,取苗爪因倾斜插入穴孔增大钵体损伤或者扎破穴盘。
(3)取苗爪应能插入理想的夹苗深度以确保取苗成功率[8]。因为,取苗时,取苗爪插入钵体过浅,会因夹取力小于脱盘力而造成钵苗损伤;取苗爪插入钵体过深,则会因钵体下端体积小而造成钵体下端在取苗爪夹持力下基质松散或扎到穴盘。
(4)取苗爪取出钵苗后,带苗至投苗位置这个运动过程中,钵苗不能与其他部件发生碰撞,以免造成钵苗损伤。
2)根据取苗装置与分苗装置的工作原理关系,本文认为两者空间协调配合应满足以下几点基本要求:
(1)取苗机构投苗时,为保证钵苗精准落入分苗杯中,取苗爪应垂直于分苗杯口以保证苗顺利落入苗杯中,且前后居中;
(2)取苗机构投苗时,取苗爪与分苗杯口之间应有足够的高度空间供取苗爪推苗,以免钵体底部与杯体碰撞,造成钵苗损伤;
(3)取苗装置应与分苗装置前后应有足够的空间供分苗机构旋转,以免分苗杯开合板与取苗装置发生干涉。
2.2 空间关系分析
根据送苗、取苗、分苗装置相互间的空间关系基本要求,合理调整送苗、取苗、分苗3装置的相对空间位置关系,如图2所示。
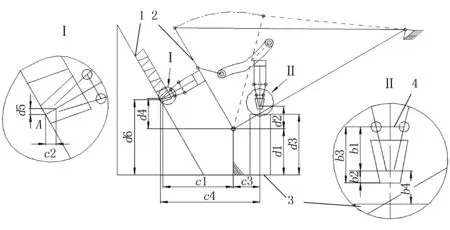
1.送盘机构 2.取苗机构 3.分苗杯 4.取苗爪推苗环
Fig.2 Spatial coordination diagram of plug conveyor,taking seeding mechanism and seedlings separation mechanism
图2中:Ⅰ和Ⅱ为局部放大图,b1为取苗爪推苗环下平面距取苗爪末端的垂直距离,b2为取苗爪末端距被取钵苗底部的垂直距离,b3为推苗环距被取钵苗底部的垂直距离,b4为被取钵苗底部距分苗杯上平面的垂直距离;c1为取苗装置转动中心距取苗爪末端的垂直距离,c2为取苗爪末端距取苗点A的垂直距离,c3为取苗装置转动中心距分苗杯中心的垂直距离,c4为取苗点A距分苗杯中心的垂直距离;d1为取苗装置转动中心距安装平台的高度,d2为取苗爪末端距取苗装置旋转中心的垂直距离,d3为分苗杯高度,d4为取苗爪取苗时,取苗末端距取苗装置转动中心的垂直高度,d5为取苗爪取苗时,取苗末端距送苗装置取苗点A的垂直高度,d6为送苗装置取苗点A距安装平台的高度。
送苗装置、取苗装置和分苗装置要实现协调配合应满足以下空间关系,即
d1=d3+b4-d2
(1)
c4=c1+c2+c3
(2)
d6=d1+d4-d5
(3)
由上式可知:d1在d3和d2高度不变时,其主要受b4的影响。理论上b4为取苗爪末端距钵体底面的距离,但实际上取苗爪夹取钵苗后,会因钵苗盘根性和重力问题产生下滑,所以b4应大于其理论值。因此,为保证取苗装置与分苗装置的空间关系协调是在最佳投苗成功率下,应合理确定b4的高度。
由上式可知:在取苗装置的旋转中心距安装平台的高度d1确定的情况下,取苗爪取苗时,在d4不变的情况下,d6的高度主要受d5的影响;c1和c3的数值不变时,c4主要受c2的影响;而d5、c2的数值大小主要受取苗爪取苗时的取苗深度影响。因此,为保证送苗装置与取苗装置的空间关系协调是在最佳取苗成功率下,应合理确定取苗深度的大小。
3 取苗深度和投苗高度试验
3.1 试验条件与方法
3.1.1 试验条件
为确定在最佳取苗成功率和投苗成功率下送苗装置、取苗装置和分苗装置的空间协调关系,以苗龄在20天左右、含水率在60%左右、整体生长情况较好,以及无倒伏和缺苗现象的黄瓜苗为试验对象,进行取苗深度试验和投苗高度试验。试验时,取苗频率均在120株/min。
本课题组研制的乘坐式全自动移栽机同时适应128孔(8×16)和72孔(6×12)两种规格穴盘苗,两种穴盘规格参数如表1所示。故针对128孔和72孔两种穴盘苗进行不同夹取深度取苗试验,以确定最佳取苗成功率下的取苗深度大小,为送苗装置与取苗装置的空间关系协调提供参数依据。但因72孔穴盘苗钵体高度及体积均大于128孔穴盘钵苗,生长周期同为20天的72孔穴黄瓜苗盘根包络性相对较差,故投苗高度试验以72孔穴盘苗为试验对象。
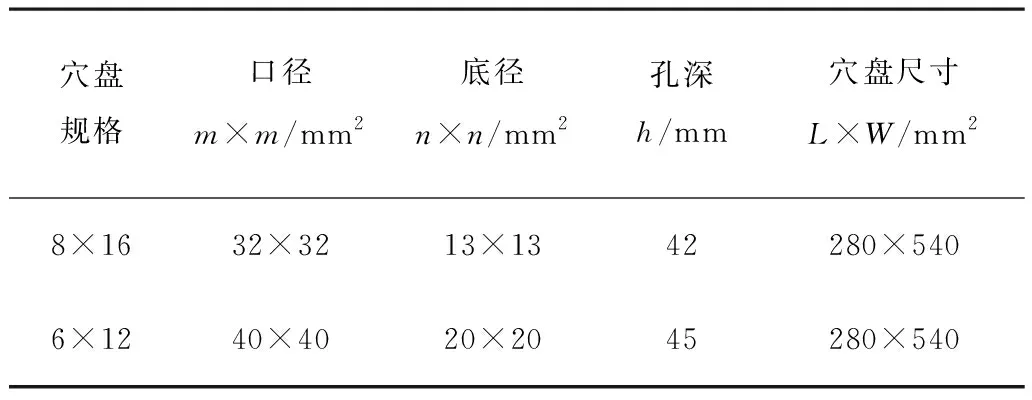
表1 分体式小麦免耕播种机试验性能结果
3.1.2 试验方法
1)取苗深度试验方法。在进行钵苗夹取深度试验时,为保证取苗成功率,参考两种规格穴盘高度h,这里选取25、30、35mm3个夹取深度进行试验,每组试验取苗64株,用数码相机记录试验情况,以取苗失败率S1、伤苗率S2作为评价指标[9-10],取苗成功率公式表示为
(4)
(5)
S=1-S1-S2
(6)
其中,N为取苗总数;N1为未取出钵苗个数;N2为取苗机构取出的钵苗苗断折断及钵体破损过半的个数;S位取苗成功率。
2)投苗高度试验方法。为确定乘坐式全自动移栽机取苗机构的投苗点高度b4以保证投苗成功率,这里应用高速摄像仪对试验台架取苗爪以最佳取苗深度30mm夹取钵苗时,对其钵苗待投位置进行统计分析,以确定最佳投苗点高度。
试验开始后,用高速摄像(高速图像采集系统OLYMPUS)监拍一盘钵苗,用ispeed软件处理已经用高速摄像仪得到的hsv格式的文件,并进行标定(这里的像素值标定在624.7pixel/mm)处理;这里用取苗爪气缸宽度来标定比例(实物与图片中的尺寸比例),取苗爪气缸实际尺寸W0=32mm。如图3所示:取苗爪气缸宽度W1=4.23mm,并在高速摄影图像中测量每个钵苗推苗环距钵体底部的高度b5。
则实物取苗爪气缸宽度W0与图片中宽度尺寸W1比例λ为
(7)

图3 标定测量图
由图2知:取苗爪推苗环下平面距取苗爪末端的垂直距离b1与推苗环距被取钵苗底部的垂直距离b3和取苗爪末端距被取钵苗底部的垂直距离b2存在以下关系,即
b2=b3-b1
(8)
根据高速摄影图像中测量的钵苗推苗环距钵体底部的高度b5和式(4)得到的参数λ知,实际中钵苗底部距取苗爪末端距离b2应为
b2=b5×λ-b1
(9)
其中,取苗爪推苗环下平面距取苗爪末端的垂直距离b1,由穴盘苗全自动移栽机气动取苗装置可知, 取b1=45mm[11]。
3.2 试验结果与分析
3.2.1 取苗深度试验结果与分析
查看数码像机取苗质量,并统计分析计算,取苗深度试验结果如表2所示。

表2 不同取苗深度下取苗试验结果
由试验结果可知:当不同夹苗深度下取苗爪对72孔穴盘进行取苗时,取苗深度为30mm和35mm两种取苗成功率较高且比较接近,造成这种现象的原因:取苗深度为30mm和35mm时,夹持针夹持部分占钵体高度比重大,且距穴孔底部距离相对远,钵体容易取出。而128孔穴盘与72孔穴盘相比,较突出的是当夹持深度为35mm时,取苗成功率相对夹持深度为30mm时的取苗成功率相差比较明显,造成这种现象的原因是:夹持针距离穴孔底部较近,且128穴孔底面积较小,容易造成钵体损伤。综合对比两种穴盘在不同夹持深度下的取苗成功率,128孔穴盘取苗成功率相比72孔穴盘取苗成功率偏高,主要原因是本取苗机构夹持针角度是以128孔穴盘苗为参考对象设计的;另外,相同天数的钵苗,72孔穴盘穴孔大,则盘根性相对较差等。因此,综合考虑两种穴盘的取苗成功率,取苗爪夹取深度选定为30mm。
3.2.2 投苗高度试验结果与分析
由表1可知:72孔穴盘孔深为45mm,在最佳取苗深度30mm下,钵苗底部距取苗爪末端距离b2理论值为15mm,故对钵苗数据进行分析时,为方便分析,这里仅列出取苗爪末端与钵苗底部距离b2大于15mm的钵苗的数据,如图4所示。
综合图4可知:取苗爪末端距被取钵苗底部的垂直距离b2因钵苗盘根性和重力问题产生的最大下滑垂直距离为29.7mm,为保证钵苗等待投苗时,分苗杯不碰撞到钵苗,b4应适当大于b2,故这里将取苗爪末端与分苗杯上平面的垂直距离b4,即投苗高度定为35mm。

图4 取苗爪末端与钵苗底部距离变化范围
4 结论
1)对乘坐式全自动移栽机的送、取、分装置间的空间关系协调配合进行了分析,确定了取苗深度和投苗高度是分别影响送取环节和取分环节空间协调的关键影响因素,可为提高送、取、分装置的移栽成功率提供参数依据。
2)对全自动移栽机的送、取、分装置进行了试验研究,在取苗时钵苗夹取深度为30mm时,送苗装置与取苗装置可进行空间协调配合;投苗高度为35mm时,取苗装置与分苗装置进行空间协调配合。
猜你喜欢
口腔颌面修复学杂志(2022年2期)2022-04-27
实用口腔医学杂志(2021年5期)2021-10-19
当代水产(2021年4期)2021-07-20
林业科技(2020年3期)2021-01-21
当代水产(2020年4期)2020-06-16
当代水产(2020年4期)2020-06-16
当代水产(2019年9期)2019-10-08
农机化研究(2019年7期)2019-05-24
农业工程学报(2018年9期)2018-06-01
中国医疗美容(2016年8期)2016-06-15
