
基于BP神经网络的立体车库存取车控制模型优化研究
2018-08-11 03:34廖易仑桂林智神信息技术公司有限公司刘德智程小辉通讯作者汪彦君桂林理工大学信息科学与工程学院
数码世界 2018年7期
廖易仑 桂林智神信息技术公司有限公司 刘德智 程小辉(通讯作者) 汪彦君 桂林理工大学信息科学与工程学院
引言:中国的经济快速发展,我国的城市的交通也是快速地发展,传统停车位不能满足人们的停车需求的现象也由此而产生了。立体车库的设计及出现,可以及时地解决停车难问题。我国这几年工业发展也很快,选购私家车的家庭逐年增多,我国又是人口大国,所以也是拥有汽车最大的国家之一。在一些地方,如居民小区和写字楼密集区域要解决这些地方的停车难问题,最直接,最快速的方法是多建一些立体车库。堆垛式立体车库可设置于地上或地下,充分利用有效空间。但其实用性较升降横移式立体车库差,高峰期依次取车时间过长,甚至超过30分钟。
本文根据BP神经网络对堆垛式立体车库进行存取车调度进行优化,根据堆垛式立体车库的特点,对BP神经网络网络参数中的初始值进行确定,选定合适的学习率、动量因子,对某一时段车库存取车的耗时总时间进行优化。
1 堆垛式立体车库的结构及工作原理
堆垛式立体车库采用巷道堆垛机或桥式起重机将载车板上的车辆水平和垂直移动到存车位,并用存取机构存取车辆的机械式停车设备。堆垛式立体车库的结构特点为,通过控制升降机构的上下移动、横移机构的前后移动以及存取车辆的行走小车的左右移动,由这三个方向(X,Y,Z)的相互配合实现车辆的存车与取车功能。立体车库内的堆垛机利用堆垛机载车平台上的载车板将汽车连同载车板移送至该车位或将车位里存入的汽车移送至堆垛机载车平台上再由堆垛机运送至地面出口处,其主视图与左视图如图1所示,为5*3*3的堆垛式立体车库,可存取30辆车。
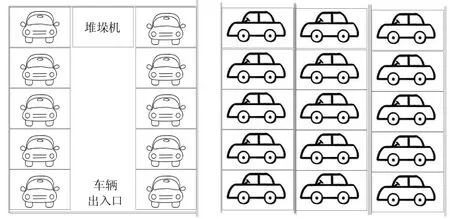
图1 车库结构图
2 PLC控制系统存取车流程
对于PLC来说,其主要任务是要完成存放车辆和取出车辆,以及检测载车板的运行状态和载车板即时的位置。所用状态元件、定时器及数据存储器均选用具有掉电保护功能的元件,当系统掉电时元件保持掉电前的状态,保证整个立体车库的安全。立体车库存车流程如图2所示。立体车库取车流程如图3所示。
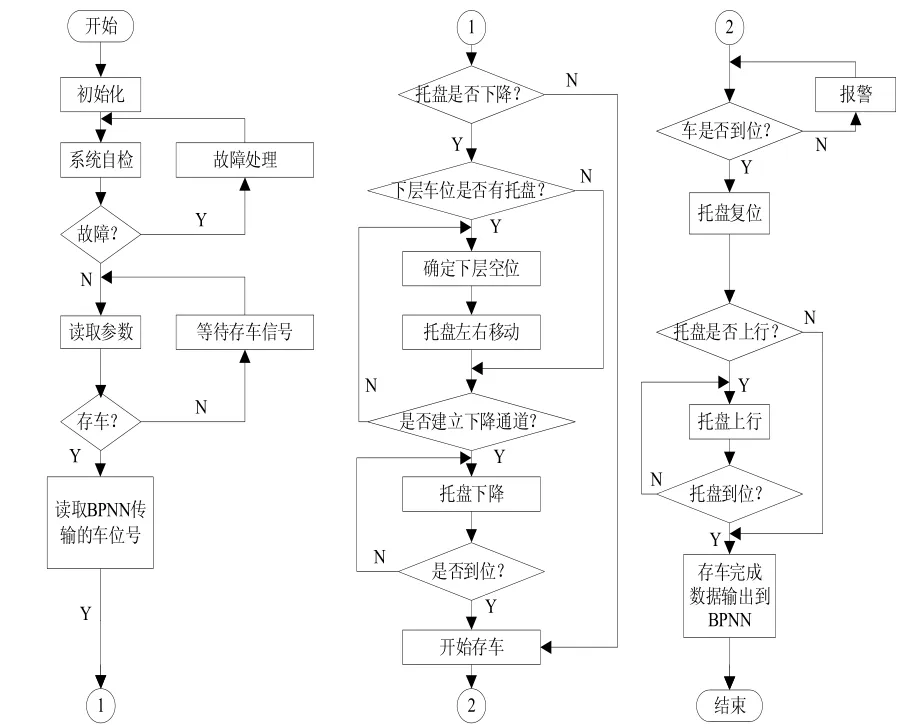
图2 存车流程图
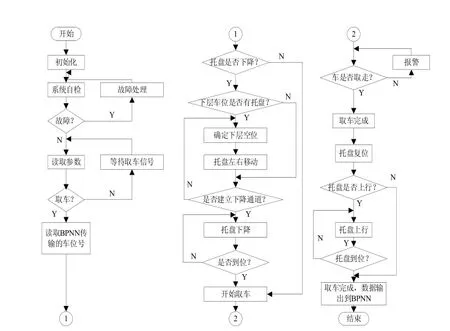
图3 取车流程图
3 BP神经网络实现存取车模型优化
3.1 存取车策略
各类型立体车库的存取车模型优化问题采用的方法很多,如基于排队论的存车优先、取车优先等不同的存取车策略;而采用基于BP神经网络进行优化,可达到总存取时间最少。为分析存取模式下堆垛机的运行时间,我们选取相同的存取次数,特定义目标函数为k次存取车操作所需的总时间∑ T。
设(a,b)为堆垛机现在的位置坐标;(c,d)为堆垛机即将执行操作的车位坐标;(e,f)为堆垛机上一次操作的车位坐标;tx,tz为堆垛机沿X轴和Z轴每运动一个车位所需的时间;ty为堆垛机在X—Z平面上到达指定坐标后,载车板沿Y轴执行存取操作所需时间,设为常数。其中,堆垛机沿X方向和沿Z方向上可同时运动,且不考虑其加减速动作所用的时间。则存取一辆车所需时间:

连续存取车所需要的总时间为∑T,则

3.2 BP神经网对存取车时间优化
BP神经网络主要由输入层、隐含层和输出层构成,如图4所示。输入层的各神经元负责接受来操作系统及PLC输出作为输入信息,输入变量的个数取决于被控系统的复杂程度。神经网络的隐含层是信息处理中心,负责进行信息变换。输出层是神经网络向PLC输出信息处理结果。理论上讲,BP算法采用梯度下降的方法进行搜寻,计算目标函数值,进行比较,确定出一个时间最优值,并传递给PLC执行。

图4 BP神经网络组成
BP 神经网络的学习过程如下:
(1)、网络结构及学习参数的确定:输入层、隐含层和输出层的神经元的数目、学习率、误差容限、动量因子、最大迭代次数。
(2)、网络状态初始化: 用较小的随机数(绝对值小于1)对网络权值、阈值置初值。
(3)、提供学习样本:输入向量和输出向量。
(4)、学习过程:权值的修改

式中:ρ为学习率,σ为动量因子。
使用BP 神经网络对立体车库的存取车策略进行优化,找到较好的存取车耗时,将耗时少的存取车顺序传递给PLC,从而达到良好的存取车时间策略。当PLC进行存取车操作时,BP神经网络不像其传输信号,当PLC结束存取车操作时,BP神经网络对其传输信号。
3.3 基于BP网络的存取车控制模型
由于厂商没有提供PLC系统的神经网络模块或指令库。对于BP神经网络的研究或应用仍采用PC平台。现有技术必须首先从PLC系统等控制设备中获取过程数据,完成BP神经网络的训练,建立模型,根据模型进行预报,最后根据预报结果修改控制参数或控制量,将结果再回传到PLC,由PLC系统优化控制等任务。故立体车库存取车控制模型采用BP神经网络将最优耗时输出到PLC,PLC对立体车库存取车进行控制,其存取车流程如第二章所示。其中,当PLC进行存取车操作时,神经网络不输出信号,待PLC完成存取车操作时,BP神经网络再输出信号到PLC,对其进行控制,达到安全控制立体车库的目的。控制模型如图5所示。

图5 基于BP神经网络优化的存取车控制模型
3 结论
本文基于BP神经网络设计的立体车库存取车优化模型优化,可以对存取车顺序进行数据采集、存储、分析并进行自主学习,当有大量用户同时存取车时,能够设计出优化的汽车存取顺序,以减少用户使用立体车库存取车时间。大多数情况下,使用神经网络得到的结果要优于PLC控制方法,能够适用于影响因素多、变化大的场合。通过以上研究,使用神经网络BP算法对立体车库存取车控制模型优化是可以实现的,可以BP将神经网络应用于此。
本论文的研究由广西重点研发计划(桂科AB17195042)支持,我们致以诚挚的感谢。
猜你喜欢
磷肥与复肥(2021年7期)2021-08-31
汽车实用技术(2021年12期)2021-07-03
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
科技风(2019年12期)2019-06-11
物流技术(2019年3期)2019-04-03
数码世界(2018年3期)2018-12-22
现代家长(2018年11期)2018-01-05
科学中国人(2017年12期)2017-01-28
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
