
机载雷达修理中的标校技术研究
2018-09-10 07:17朱康珑
航空维修与工程 2018年12期
关键词:修理
朱康珑

摘要:阐述了机载雷达修理中的主要标校工作内容,以及标校技术对机载雷达的战术、技术指标性能的重要作用,结合修理实例介绍了机电零位误差标校和光电轴标校的原理和具体方法。
关键词:机载雷达;修理;标校
0引言
机载雷达是用于检测和定位反射目标的一种电磁系统,通过将能量辐射到空间并且探测由物体或目标反射的回波信号来工作。目标的角度位置可以根据收到的回波信号幅度为最大时由窄波束宽度雷达天线所指的方向而获得。需要关注的是,雷达天线的实际指向与测角传感器传递给计算机的测量值之间的误差直接影响机载雷达的探测范围、探测精度、探测分辨率等重要战术、技术指标性能。机载雷达的天线指向精度并不是一个固定值,而是时问的函数,尤其是天线经过拆装或遭受撞击以后,需要立即进行标校。另外,随着机载雷达使用时间的增加,在修理时更换的器件日益增多,机械误差、电参数漂移积累等原因导致的性能指标超差现象时有出现,用户在使用中也多次反映雷达角跟踪误差超标等问题。
为保证机载雷达的工作性能,满足作战、训练要求,需要定期进行机载雷达的机电零位误差、角跟踪误差等参数的标校工作。机载雷达系统标校的一般顺序为:先进行天线座机械轴系误差标校,再进行电气零位标校,最后进行光电轴标校。不同型号的机载雷达,因为结构、精度和测角元件的不同,具体标校方法存在差异,需要结合雷达说明书确定,但是标校技术原理是一致的。
1机电零位误差标校
1.1天线座机械轴系误差标校
天线座重新装配或进行修理后,需要对机械轴系误差进行标定,若未能达到规定指标,应进行相应的调整,或对由此误差造成的雷达系统误差进行校正,校正的方法有调整电气零位、调整补偿电路等。天线座需要标定的机械轴系误差通常包括:
a.天线座安装面的平面度;
b.方位轴与安装面的平行度;
c.方位轴与俯仰轴的垂直度;
d.方位轴与水平面的垂直度。
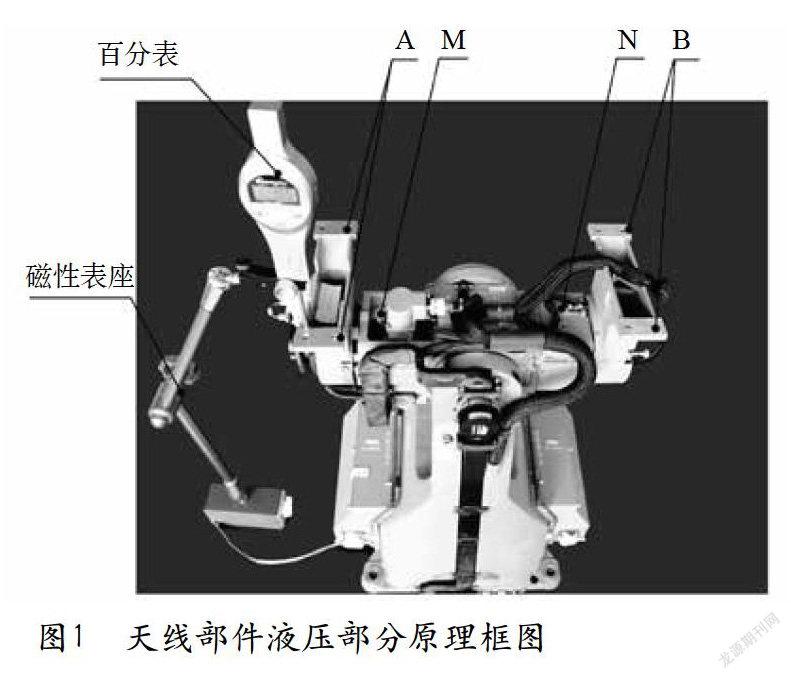
以图1中的天线座为例,标定机械轴系误差时,将天线座的安装底座朝下,放置于经过标校的大理石平台上。采用大伸缩行程的百分表及调整范围大于天线座高度的磁性表座,通过测量圖1中A面和B面的高度差得出俯仰方向的平行度,通过测量M面和N面的高度差得出方位方向的平行度。沿方位和俯仰转轴调整平面,使平行度等形位公差符合设计精度要求。此时,各角度副尺应指向对应角度主尺的零度线,如果偏离,可以拧松角度副尺的固定螺钉进行调整,对准角度主尺的零度刻度线后拧紧固定螺钉,完成机械轴系误差标校。
1.2电气零位标校
1)天馈伺单元测角原理
图2是天馈伺单元角度测量和控制原理框图。综合处理机根据工作模式指令,通过伺服放大器控制方位、俯仰驱动单元转动,实现天线的搜索/跟踪运动。方位、俯仰旋转变压器实时测量天线的方位/俯仰角度值并反馈给综合处理机,综合处理机根据当前的电轴指向等参数,计算出目标的位置信息。为了保证对目标位置的测量精度,要求旋转变压器的测量值能够真实反映天线的实际指向,即在机械轴系误差满足要求的前提下,天馈伺单元的方位、俯仰刻度标尺指向零(即机械零位)时,方位、俯仰旋转变压器的输出零位精度应符合要求。
2)旋转变压器工作原理
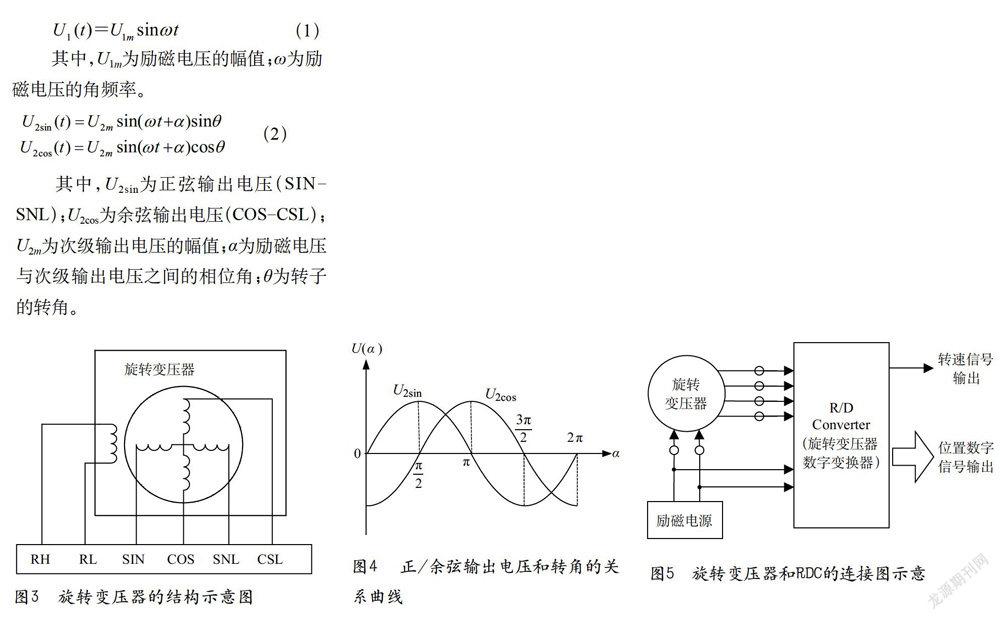
旋转变压器是根据互感原理工作的,以某型正余弦旋转变压器为例,其结构示意图如图3所示。
在图3中,励磁绕组RH RL由单相交流电供电,供电电压可以表示为:
当转子转动时,由于励磁绕组和次级输出绕组的相对位置发生变化,因而次级输出绕组的感应电动势也发生变化,两组次级输出绕组在空间上成正交的90°电角度,因而两组输出电压可以表示为:
根据式(1)和式(2)可以发现,励磁电压和输出电压是同频率的,但存在着相位差。正弦输出电压和余弦输出电压是同相位的,但幅值随转角分别作正弦和余弦函数变化,如图4所示。因此,根据信号幅值大小可以获取旋转变压器的角度值,而根据输出电压的正负关系可以获取旋转方向。
3)电气零位标校方法
天馈伺单元的电气零位标校必须在完成机械轴系误差标校之后进行。将天馈伺单元的方位、俯仰、横滚方向的机械零位分别调整到允许误差范围后,依次测量方位、俯仰、横滚方向的旋转变压器角度值,如果角度误差大于设计指标,则需要进行电气零位标校。
测量旋转变压器的角度值时,需要先掌握旋转变压器的主要参数,包括额定励磁电压及励磁频率、变压比、最大输出电压、电气误差、阻抗、相位移、零位电压、基准电气零位等。旋转变压器的信号输出是两相正交的模拟信号,其幅值随着转角做正余弦变化,频率和励磁频率一致,通过角度数据变换电路把模拟量变换成明确的角度量,这就是旋转变压器数字变换器(RDc)电路,如图5所示。
图5测得的旋转变压器的角度值,如果大于设计允许误差指标,则可以先断开旋转变压器轴端与被测机构的连接,再转动旋转变压器的转轴,将角度值调整到允许误差范围内后,再恢复旋转变压器轴端与被测机构的连接。通过上述步骤就完成了电气零位标校。要注意的是,在恢复旋转变压器轴端与被测机构的连接过程中,观测角度值不应发生变化,否则需要重新进行电气零位标校。
2光电轴的标校
2.1标校原理
雷达光轴是安装在雷达上的水准仪十字中心呈现出的远方目标点与水准仪物镜中心的虚拟连线。雷达的电轴是当雷达工作在自动跟踪目标模式下,当角误差信号为零时,目标点与雷达天线馈源的中心点(天线波瓣轴)之间的虚拟连线。由于雷达的方位角和俯仰角标校是采用光轴瞄准进行的,而雷达在测量和跟踪目标时,是通过电轴对准目标,因此必须要求雷达的光轴和电轴一致,否则雷达的方位角和俯仰角将产生误差。可见,在对雷达的方位角和俯仰角进行标校之前,必须先进行光电轴标校。雷达光电轴标校,就是使雷达光轴与电轴互相平行,并且使电轴与雷达俯仰角旋转轴互相垂直。
2.2标校方法
雷达光电轴标校如图6所示。矩形喇叭天线距天线前端15~18m。采用标校工装将激光水准仪准确固定在雷达天线口面的法线上。由于激光水准仪到天线焦点的高度差L是已知的,将校准靶标与矩形喇叭天线的高度差也调整为L。开启激光照射前方,调整校准靶标的位置,直至与激光焦点重合,则能保证矩形喇叭天线与天线口面的法线对准。
采用天线远场测试方法进行天线方向图测试,根据方向图测试结果进行分析,如果波束的零深处不为0°,则表示雷达光轴与电轴不同轴。光电轴不同轴时,可在调整馈源安装位置后再进行光电轴标校,直至测得的方向图波束的零深处为O°,即完成了光电轴的标校。
为了保证测量出准确的角跟踪误差值,要求对测量精度进行有效控制,工装设备的精度应满足以下要求。
1)水准仪:精度不低于2”。修理中实际采用NAL24R激光水准仪,精度为1.15”,应定期进行计量,保证测量精度。
2)信号源:频率稳定度优于5×10(-5)。
3)矩形喇叭天线:增益不小于15dB。
4)标校工装:通过配打与天线固定基座的中心定位孔,保证对中精度。
2.3光电轴标校在故障修理中的应用
以某型振幅和差天线为例,雷达工作时,天线在一个角平面内有两部分重迭波束1和2,如图7a)所示。
振幅和差天线取得角跟踪误差信号的基本方法,是将这两个波束同时收到的回波信号进行和差处理,分别得到和信号与差信号。和、差信号相应的和、差波束如图7的b)和c)所示,其中差信号就是该平面的角跟踪误差信号。从图7a)可以看出,如目标处在天线轴线方向(等信号轴),误差角为零,则两波束收到的回波信号振幅相同,差信号为零;如目标偏离等信号轴(误差角不为零),则两波束收到的回波信号振幅不同,产生的差信号振幅与误差角成正比,符號(相位)由目标偏离方向确定。可见,如果图7a)零深处不为0°,表示光轴与电轴不同轴;如两个波瓣不对称,说明比前电压失衡(由天线光学部分引起)。由此可知,测量天线方向图可定量分析天线的角跟踪误差并分析其原因,便于针对性地调整。雷达天线系统产生角跟踪误差的主要原因和修理措施如表1所示。
3结束语
机载雷达标校技术是雷达的核心修理技术,也是保证机载雷达战术、技术性能指标的重要修理手段。修理实践表明,本文介绍的机载雷达标校技术具有资金相对投入少、操作工艺简便等优点,能够快速发现并排除机载雷达的机电零位误差、角跟踪误差等故障,有效提高了机载雷达修理质量。
猜你喜欢
农机使用与维修(2017年4期)2017-04-14
中国新技术新产品(2017年3期)2017-03-07
农机使用与维修(2017年1期)2017-02-07
职工法律天地·下半月(2016年10期)2016-11-30
农机使用与维修(2016年10期)2016-11-10
科技视界(2016年15期)2016-06-30
企业文化·下旬刊(2016年5期)2016-06-04
环球时报(2016-04-20)2016-04-20
