单自由度平面六杆手指机构解域综合方法
2018-09-17 06:49韩建友蔡营疆
农业机械学报 2018年9期
韩建友 蔡营疆
(北京科技大学机械工程学院, 北京 100083)
0 引言
仿生手的发展给残疾人的生活带来极大的便利。为实现人手指的功能,许多手指被发明出来,比如采用记忆合金的手指[1-3]具有无噪声的特点。POTRATZ等[4]采用弹簧来减轻手指的质量,但其具有5个自由度,需要较多的驱动电机。LOTTI等[5]采用由弹性铰链构成的连杆机构,其自由度为4,成本较高。还有采用单晶硅的手指[6]和欠驱动多自由度手指,比如Belgrade/USC手指[7]、TBM手指[8]和SPRING手指[9],这些手指采用腱驱动其中的几个关节即可实现运动,没有被驱动的关节的运动则取决于抓取物体的外形。除此之外,欠驱动手指理论也有一定的发展[10-12]。欠驱动手指分为两类,一种是采用肌腱驱动的手指,一种是采用连杆驱动的手指,如文献[13]中的手指同时采用平面五杆机构和平面四杆机构,其成本较低。也有根据人手骨骼结构设计的手指[14],然而这种手指结构比较复杂,加工较难。另外,也有采用气动柔性驱动器进行驱动的手指[15-16],但其仿生程度不高。连杆机构可以应用于康复手指的设计,但是在已有的康复手指中,文献[17-18]根据初始的条件只得到一个确定的机构。本文采用单自由度平面六杆机构设计手指机构,其控制简单,采用1个电机即可实现控制,易加工,且通过解域法得到满足初始条件的无穷多机构,每个机构都可以应用于手指的设计,因此可达到机器人手指多用途、多尺寸、易控制的要求。同时为得到较好的力学性能,引入力传递性能指标K[19]。本文在文献[20-21]的基础上进行改进和扩展,对解域的形成给出不同的生成方法,该方法能更明确地表示出解域上连续变化的性能,从而形成所需要的各种曲线,并引入力传递性能指标。
1 手指机构综合
本文首先给出手指机构的3个指节的4个运动位置,并给定手指关节的坐标限制范围,据此得到铰链点的可行曲线段,对可行曲线段进行分段,形成解域,然后引入力传递性能指标K,对解域进行筛选,得到可行解域,最后在解域中选择一个平面六杆机构,得到手指机构的全部参数,并根据选择的机构给出手指的设计示例,整个过程如图1所示。

图2 连杆平面运动示意图Fig.2 Diagram of links planar motion
1.1 运动生成综合理论


(1)
(2)
根据杆长不变原理,连杆BM的长度不变,即
[Bi-Mi]T[Bi-Mi]=[B1-M1]T[B1-M1]
(3)
将式(1)、(2)代入式(3),整理可得
CixB1+EiyB1+Fi=0 (i=2,3,4)
(4)
把xB1和yB1看作未知数,则式(4)有解的条件为
(5)
整理可得铰链点M满足的三次曲线方程[22-24]
(6)
曲线(6)为广义布尔梅斯特曲线,在曲线(6)上取得一点,可得铰链点M在运动位置1的坐标,代入式(4)即可得到对应的铰链点B在运动位置1的坐标。若其中一个连杆平面为固定平面,则对应的位移矩阵为单位矩阵,此时曲线(6)为布尔梅斯特曲线。利用本节求曲线方程的方法,可对平面六杆机构进行综合。
1.2 解曲线及解域生成
本文采用Watt-I型平面六杆机构设计手指。平面六杆机构需要实现人手指弯曲的动作,同时,当有外力施加到机构上时,机构需要具有良好的力学传递性能。文献[20]根据Watt-I型平面六杆机构4位置运动生成理论得到解域,其表达了所有Watt-I型平面六杆机构在解域中的位置,但未能表达机构的力学性能和铰链点的实际坐标,本文在此基础上,给出新的解域生成方法,对曲线分段,按铰链点的实际坐标生成3部分解域,将铰链点坐标直接表达在解域上,除此之外,引入力传递性能指标K,得到K在解域上的分布规律,使得解域中机构的力学性能更加直观。

图3 单自由度平面六杆机构Fig.3 Planar six-bar mechanism with one DOF
图3为单自由度平面六杆机构,其通过4个预定的运动位置(位置1、2、3、4)。铰链点a0和铰链点d0为固定铰链点,其他铰链点为动铰链点,且铰链点a0位于所选坐标系的原点,铰链点d、e、f、d0为待求铰链点。θ1、θ2、θ3分别为a0a、ab、bc与x轴的夹角(按右手法则,逆时针为正)。L1、L2、L3分别为a0a、ab、bc的长度。F为施加在连杆bce上的外力(为简化受力状态,将外力施加在1个连杆上),T为施加在连架杆a0ad上的力矩。在运动过程中F的大小不变(为方便计算,示例中设置为1 N),驱动力矩T为待求量。
根据人手指3个指节的长度,给定L1、L2、L3的值,如表1所示。给定θ1、θ2、θ3在4个运动位置的值,如表2所示,给定铰链点d0、d、e、f的坐标限制范围,如表3所示。通过连架杆a0a的4个位置和连杆bc的4个位置,即2个连杆平面,采用1.1节求铰链点曲线的方法,得到在运动位置1处铰链点d的解曲线(Cd)及可行段,也可得到铰链点e的解曲线(Ce)和可行段,此时a0、a分别对应图2中的b、m。θ1、θ2分别对应图2中的α、β。d、e分别对应图2中的B、M,通过计算整理得Cd和Ce,其与式(6)具有相同的形式。图4显示了解曲线Cd和可行段。由于Cd可行段上的点和Ce可行段上的点需同时满足各自的坐标限制范围,Cd可行段并不连续。

表1 L1、L2、L3的值Tab.1 Values of L1, L2 and L3 mm

表2 θ1、θ2、θ3在4个运动位置的值Tab.2 Values of θ1, θ2 and θ3 in four moving positions (°)

表3 待求铰链点坐标限制范围Tab.3 Limited ranges of coordinates of unknown joints mm
Cd可行段上的点和Ce可行段上的点有一一对应的关系。在Cd可行段上选择一点后,与该点对应的铰链点e也确定,即确定连杆de在运动位置1处的位置,通过铰链点d和铰链点e可得到连杆a0ad和连杆bce的尺寸,基于此,得到铰链点d和铰链点e在其他运动位置的坐标,通过连杆de的4个位置和机架,采用1.1节求铰链点曲线的方法,得到铰链点d0在运动位置1处的解曲线(Cd0)和可行段,也可得到铰链点f的解曲线(Cf)和可行段。此时原点O、d分别对应图2中的b、m。de为图2中的lm1且α为0°。d0、f分别对应图2中的B、M,通过计算整理得到Cd0和Cf,其与式(6)具有相同的形式。
在Cd可行段上选择不同的点会得到不同的解曲线Cd0和可行段,图5和图6分别为当选择图4中点A和点B后得到的铰链点d0的解曲线和可行段。Cd0可行段上的点和Cf可行段上的点也有一一对应的关系。在Cd0上选择一点后,就确定了连杆d0f在运动位置1的位置,结合连杆de在运动位置1处的位置,就确定了1个平面六杆机构。
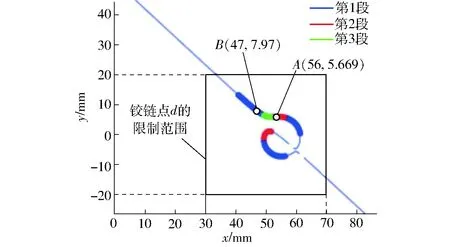
图4 铰链点d解曲线和可行段Fig.4 Solution curve and feasible curves of joint d
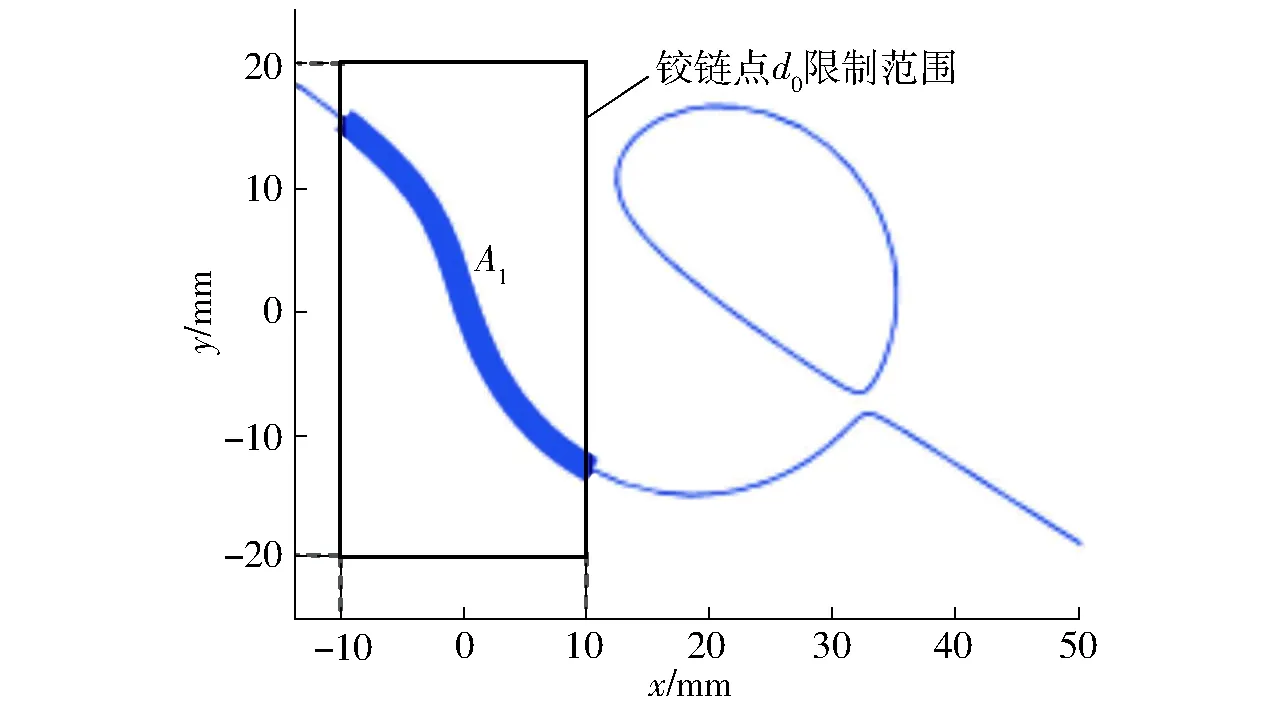
图5 图4中取A点得到的铰链点d0解曲线及可行段Fig.5 Solution curve and feasible segments for joint d0 corresponding to point A in Fig.4
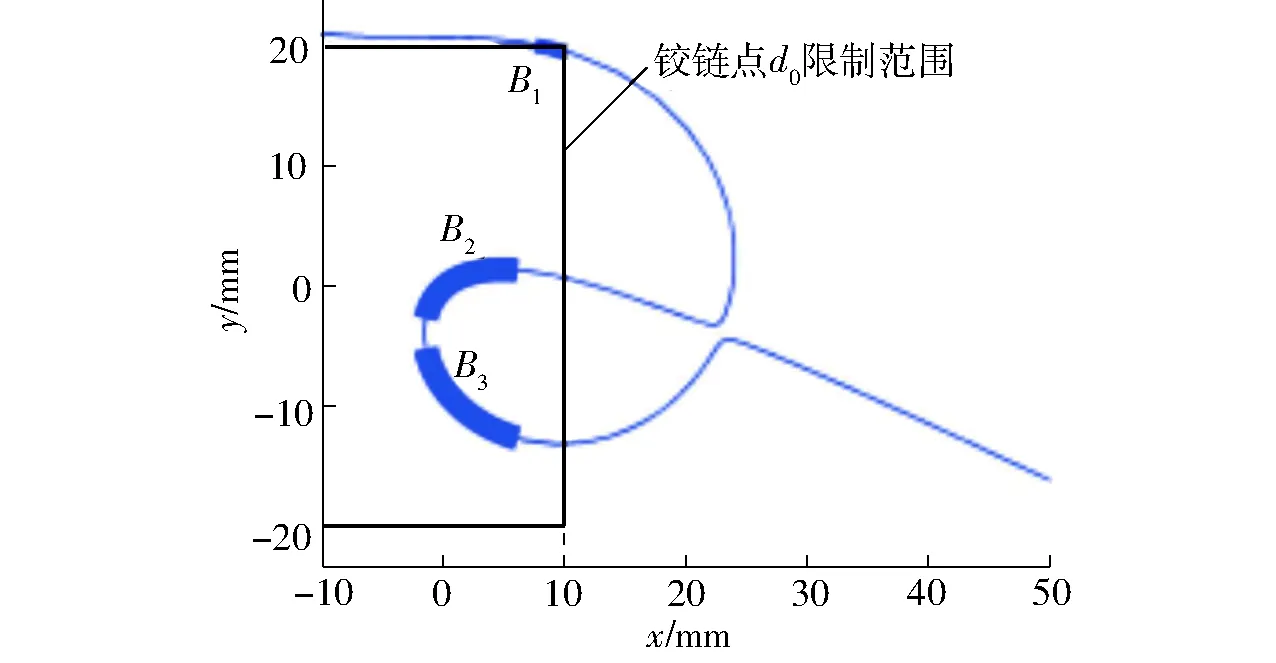
图6 图4中取B点得到的铰链点d0解曲线及可行段Fig.6 Solution curve and feasible segments for joint d0 corresponding to point B in Fig.4
连杆de和连杆d0f的位置分别由4个坐标分量(dx,dy,ex,ey)之一和4个坐标分量(d0x,d0y,fx,fy)之一决定,因此,可采用dx和d0x分别为横坐标和纵坐标生成解域。当x为一定值时,三次曲线方程变为关于y的一元三次方程,其可能有1个或3个实根。因此,对曲线按如下规则进行分段:当只有1个实根时,点(x,y)分入第1段曲线;当有3个实根时,按照y从小到大的顺序把点(x,y)分别分入第1、第2、第3段曲线。根据此分段规则,Cd可行段被分为3段,其横坐标范围分别为41.2~61.6、49.6~56.4、49.6~52.0,如图4所示。Cd0被分为1段或者3段。在Cd可行段上选择一点,得到点(dx,dy),并在得到的Cd0可行段上选择一点,得到点(d0x,d0y),则解域点为(dx,d0x),令m(m=1, 2, 3)和n(n=1, 2, 3)分别表示点(dx,dy)和点(d0x,d0y)所在的曲线段标号,则解域点(dx,d0x)在图7中的区域(m,n)(即图7中圆圈中的数字)。从横坐标41.2到56.4按照步长0.2选择Cd可行段上的每一点,并选择得到的Cd0可行段上的每一点,得到如图7所示的解域。解域中的A1(一条实线)对应图5可行段A1。B1、B3组成图6可行段的第1段,B2为图6可行段的第2段。

图7 平面六杆机构解域Fig.7 Solution region for planar six-bar mechanisms
1.3 力传递性能指标的确定和可行解域生成
为得到力学性能较好的机构,引入力传递性能指标。压力角可衡量一个机构的力传递性能,但只有当外力施加在连架杆上时,压力角才适用[19]。本文中外力F施加在连杆bce上,而不是连架杆d0f或者连架杆a0ad,故此时压力角并不适用于衡量机构的力传递性能,故本文引入K。
如图3所示,在运动过程中,假设外力F总是垂直于边ec,并位于边ec的中点。为方便计算,设外力F为1 N。在θ1从0°连续变化到-40°的过程中,令Fmax_i(i=a,b,d,e,f,a0,d0)表示铰链点i的内力最大值,令Fmax表示Fmax_i(i=a,b,d,e,f,a0,d0)中的最大值,则参数K表示为[19]
(7)
根据手指的设计目的(如康复手指、仿生手指等),限制K的大小。康复手指对力学性能要求较高,可取较小的K,而仿生手如果仅着重于外形,则可取较大的K。本文限制K≤20。利用K对图7中的所有机构进行筛选,可得到筛选后的铰链点可行段。图8为引入K后铰链点d的解曲线和可行段。当选择图8中可行段上的C点后,得到筛选后的铰链点d0可行段,如图9所示。根据上文提到的曲线分段规则重新对可行段进行分段,得到如图10所示的新的可行解域。图10中解域1和解域2为后文选择平面六杆机构的区域,图中点E、F、G和H坐标分别为(48,-4)、(50, 0)、(54,-10)和(57,-2)。
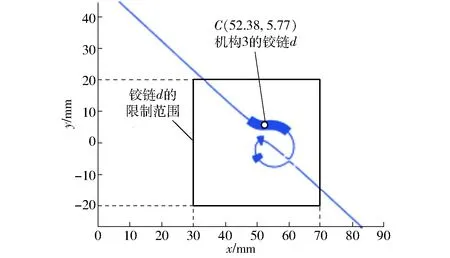
图8 引入K后的铰链点d解曲线及可行段Fig.8 Solution curve and feasible segments for joint d with parameter K
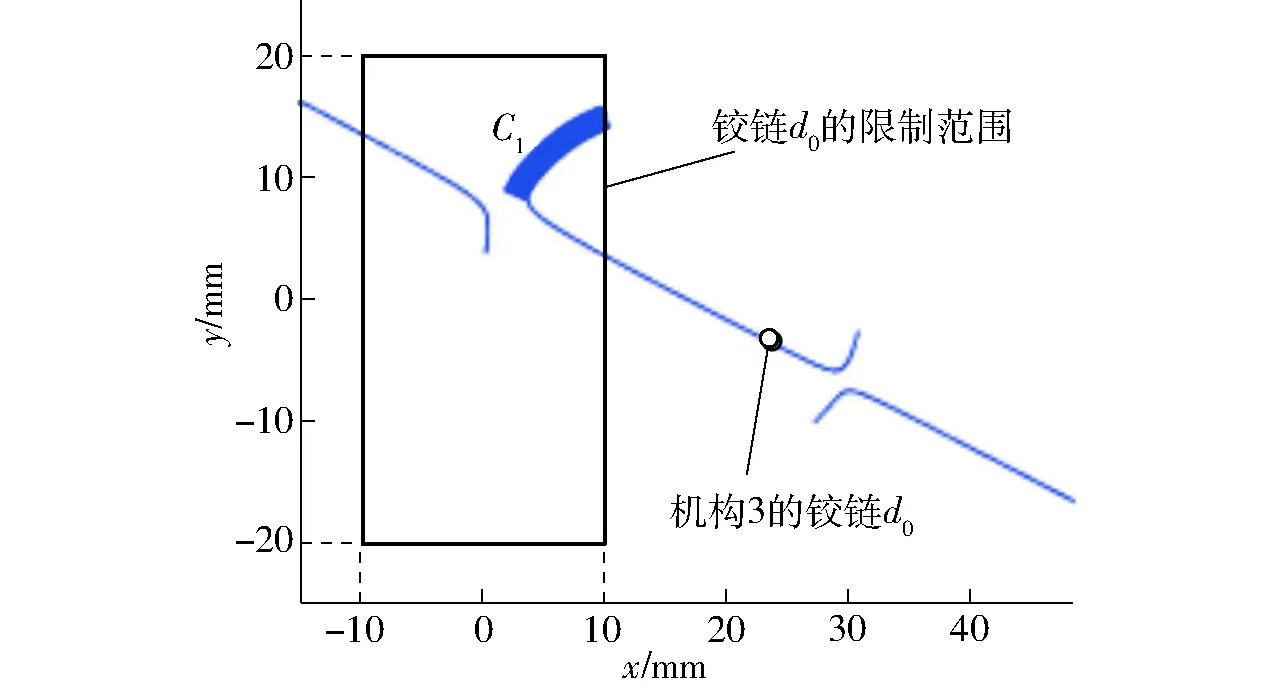
图9 图8中取C点得到的铰链d0解曲线及可行段Fig.9 Solution curve and feasible segments for joint d0 corresponding to point C in Fig.8
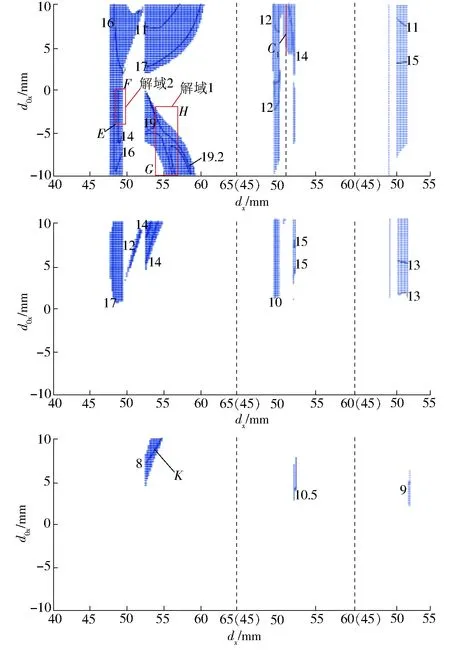
图10 引入K后的解域Fig.10 Solution region with parameter K
2 机构选择和设计示例
采用单自由度平面六杆机构进行手指的设计,机构铰链点间的距离可影响手指的外形,因此,K较低的平面六杆机构由于其力学性能较好,可用来设计对力学性能要求高的手指,如康复手指,而铰链间距离较小的平面六杆机构其结构更加紧凑,可用来设计仿生手指等对外形要求高而对力学性能要求较低的手指,但也要考虑结构上能否实现。图11为3个具有不同外形和K的平面六杆机构。
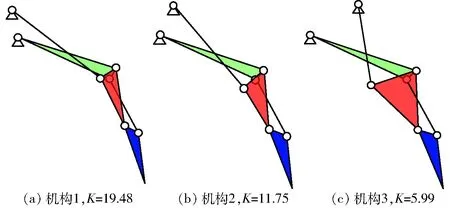
图11 3个具有不同形状和K的平面六杆机构Fig.11 Three planar six-bar mechanisms with different shapes and K values
将图10中的解域1和解域2进行放大,更清楚地显示机构在解域中的位置,如图12和图13分别显示机构1和机构2在解域中的位置。机构3的铰链d和铰链d0在曲线上的位置分别如图8和图9所示。由于机构3的铰链d0在限制范围外面,因此解域不包含机构3。

图12 机构1在图10解域1中的位置Fig.12 Location of mechanism 1 in solution region 1 shown in Fig.10

图13 机构2在图10解域2中的位置Fig.13 Location of mechanism 2 in solution region 2 shown in Fig.10
机构2和机构3的K小于机构1的K,而机构1的结构更加紧凑,故机构2和机构3具有较好的力传递性能,用于康复手指的设计可更好地帮助人手指的运动康复,而机构1用于设计仿生手指可得到更好的手指外形。本文利用机构1给出仿生手指设计示例,机构1的铰链点坐标如表4所示。
设计出的仿生手指包含3个指节和2个隐藏在内部的连杆。如图14所示,图14a为手指外形示意图,图14b为手指内部结构。图15为3D打印样机示例。图中手指依次通过4个预定的运动位置,采用1个驱动电机即可驱动该手指。

表4 机构1的铰链点坐标Tab.4 Coordinates of mechanism 1 mm
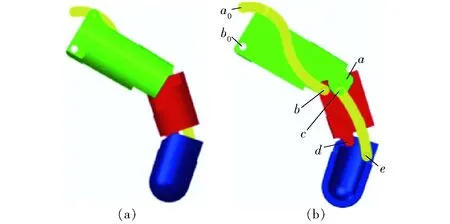
图14 仿生手指结构Fig.14 Structure of anthropomorphic finger
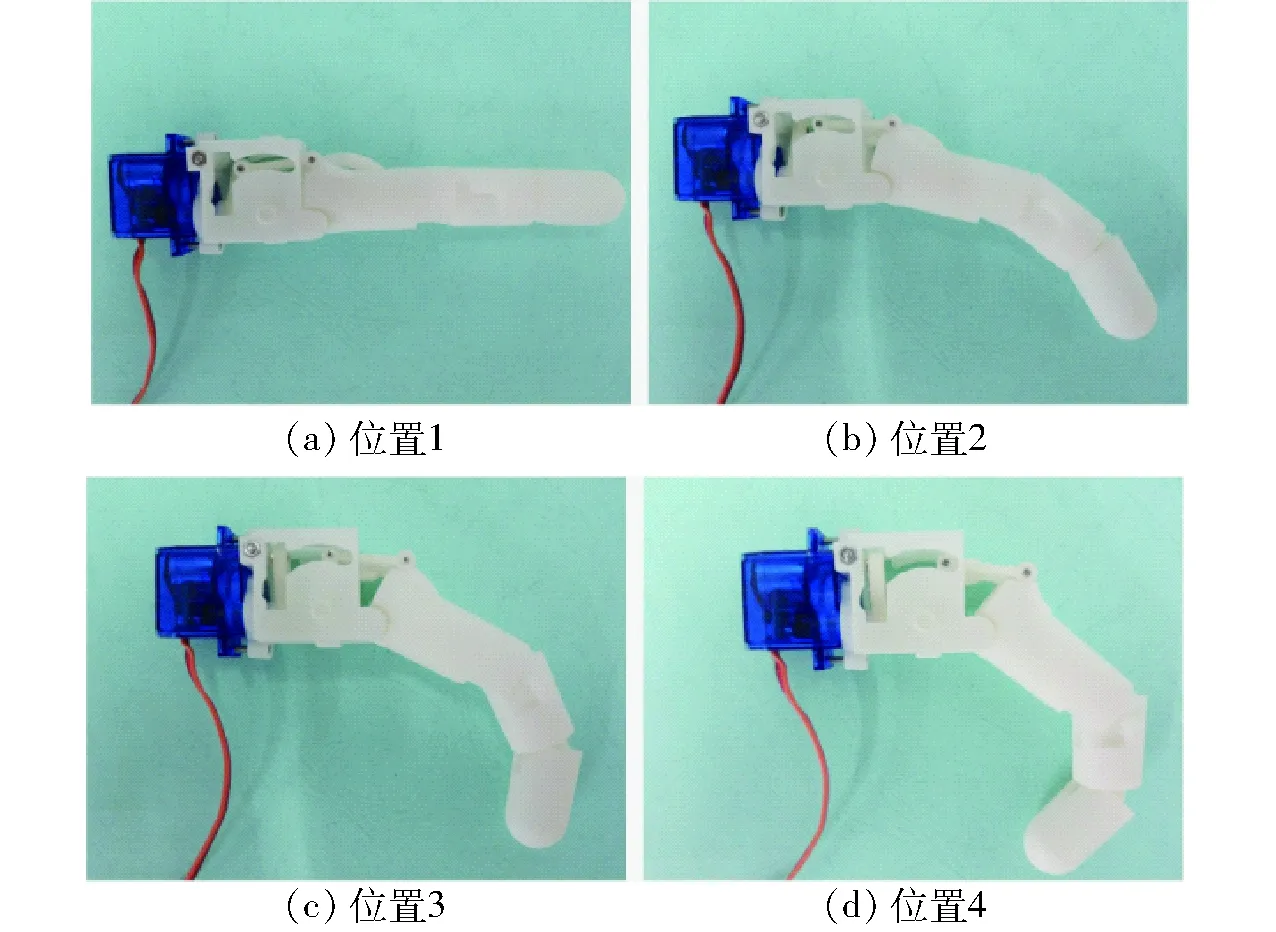
图15 仿生手指3D打印样机Fig.15 Prototype of anthropomorphic finger
3 结论
(1)手指虚拟样机的运动过程能通过给定的4个运动位置,证明设计理论和设计方法是正确有效的。手指样机能实现预期目标,证明了结构上也是可行的,且能满足各种性能要求。
(2)采用单个驱动电机即可驱动手指,证明力传递性能指标的引入有利于得到具备较好力学性能的机构,并有利于手指功能的实现。解域能给出所有满足要求的机构解,可根据不同的设计目的选择合适的结构,满足机器人手指多尺寸、多用途的设计要求,同时,也为进一步优化手指结构提供了可能。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
石油矿场机械(2022年3期)2022-06-17
小聪仔(婴儿版)(2020年12期)2021-01-26
装备制造技术(2020年2期)2020-12-14
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
汽车实用技术(2017年16期)2017-09-21
少年科学(2015年8期)2015-08-13
CHIP新电脑(2014年5期)2014-05-14