基于动力定位系统的沙漏型浮体多自由度耦合运动分析
2018-09-22 03:30王琳琳,杨文东,杜亚震,柳天华,王文华,黄一*
大连理工大学学报 2018年5期
王 琳 琳, 杨 文 东, 杜 亚 震, 柳 天 华, 王 文 华, 黄 一*
(1.大连理工大学 船舶工程学院,辽宁 大连 116024;2.凌源水务局,辽宁 朝阳 122500)
0 引 言
传统的锚泊定位方式受作业水深、工作时间、精度要求等因素的限制无法满足海上作业的要求,因此动力定位技术由于其在保持船舶位置和航向方面的优势得到了广泛应用.在动力定位系统设计时,通常只考虑水平面内的3个自由度(纵荡、横荡和艏摇)的运动问题[1].Balchen等[2]将卡尔曼滤波及最优控制理论应用在动力定位系统中.20世纪90年代以来,模糊控制[3]和神经网络[4]等技术被广泛应用到动力定位系统中.Srensen等[5]在2000年发现具有小水线面的半潜式平台由于动力定位系统的作用,使其产生显著的纵摇和横摇运动响应,提出了在纵荡和横荡控制力项中考虑纵摇和横摇阻尼项来抑制纵摇和横摇运动响应的方法.Xu等[6]针对半潜式平台出现的同一问题考虑了纵摇和纵荡加速度项,对抑制平台的面外运动起到了较好的作用.Liang等[7]采用L∞控制分析了半潜式平台水平面和垂直面的耦合运动.
随着海洋资源的开发逐渐向深海和超深海进军,浮式生产储卸油装置 (floating production storage and offloading unit,简称 FPSO)拥有了良好应用前景.但是,传统船型FPSO存在对荷载方向敏感,横摇和垂荡性能差等缺点.圆筒形FPSO虽然克服了以上缺点,但是由于其垂荡固有频率在波浪能量集中频率附近,容易产生较大幅度的垂荡运动响应.因此,为了解决传统船型和圆筒形FPSO 的性能局限,Huang等[8-12]提出了一种新概念沙漏型FPSO和FDPSO(floating drilling production storage and offloading unit).该浮体的垂荡固有频率能够成功避开波浪能量集中频率,具有良好的垂荡运动性能,适用于深海及超深海作业.因此,本文主要基于沙漏型浮体开展有关动力定位系统的研究.
通过分析可以发现,由于具有水线面面积和初稳性高较小等特性,新概念沙漏型浮体进行动力定位时,纵摇固有频率容易与推进器产生纵向控制力的频率接近,从而导致纵荡和纵摇耦合运动响应明显增大,无法满足实际工程的限位要求.针对此问题,本文采用基于势流理论的边界元方法,对其波浪荷载和水动力参数进行研究.此外,根据推进器的实际布置位置引入控制荷载,建立沙漏型浮体的纵荡-垂荡-纵摇耦合运动方程.在此基础上,利用时域和频域分析方法对相应的数值算例进行研究,并且深入讨论纵荡和纵摇的耦合运动问题.最后,采用在纵荡控制力中考虑纵摇阻尼和纵摇惯性力项的控制方法,直接削弱纵摇运动响应,使纵摇和纵荡固有频率相互远离,进而使得沙漏型浮体的纵荡和纵摇运动响应明显减小,从而满足定位精度的要求.
1 动力定位系统模型
1.1 坐标系
本文算例选用的坐标系为固定坐标系OXYZ和运动坐标系o-xyz[13],如图1所示.
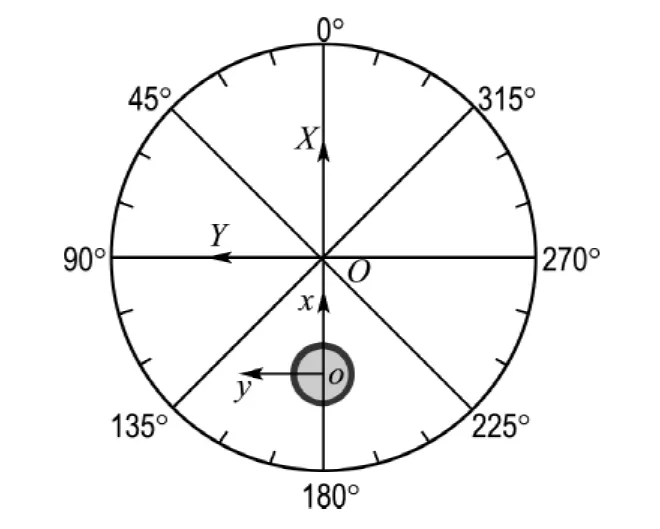
图1 坐标系Fig.1 Coordinate systems
1.2 新概念沙漏型FDPSO主要参数及数值模拟方法
本文的研究对象是新概念沙漏型FDPSO,其主尺度和边界元模型如图2所示.其中,水线面半径Rw为43.60m,上甲板半径Rt为64.87m,下底面半径Rb为63.67m,上倾角β为25.69°,下倾角α为52°,吃水d为25.69m,干舷f为10.34 m,排水量为240 750t,水线面以上体积Vt为96 735.95m3,排水体积Vb为234 878.05m3.
基于三维波浪势流理论[14-15]计算沙漏型浮体的波浪荷载和相关水动力参数.通过与水池模型实验数据进行对比,其准确性得到了验证[16-17],可以用于本文沙漏型浮体纵荡-垂荡-纵摇耦合运动响应的数值模拟.

图2 沙漏型FDPSO外形参数和边界元模型Fig.2 Shape parameters and boundary element modelof sandglass-type FDPSO
1.3 水平面内的PID控制方法
本文采用基于水平面内纵荡、横荡、艏摇运动参数的比例积分微分控制(proportional-integraldifferential control,PID)方法,表达式如下:

其中η3=η-ηd=(x-xdy-ydθ-θd)T,v3=η.3.Kp、Ki、Kd是 非 负 增 益 矩 阵.比 例 项(proportional law)用来为系统提供回复刚度,积分项(integral law)用于抵消外荷载中的风荷载、流荷载、波浪荷载定常项成分,微分项(differential law)用于增加系统的阻尼.
1.4 沙漏型FDPSO的运动方程
参考文献[1]中的浮体运动方程,结合新概念沙漏型浮体的相关外形特点,建立在两种动力定位分析模型(考虑和不考虑推进器实际位置)下的浮体运动方程.此外,由于沙漏型浮体具有中心对称的几何形状特征,这里仅讨论纵荡-垂荡-纵摇运动的相互作用.
1.4.1 推进器荷载作用点位于重心的浮体运动方程 对于传统的动力定位控制方法,动力定位系统产生推力的作用点位于浮体重心处,只对水平面内运动进行控制,如图3所示.因此,水平面内仅考虑纵荡运动控制作用的沙漏型浮体运动方程可表示为

其中F1为纵荡方向的环境荷载,τs为推进器在纵荡方向产生的推力,m11为纵荡含附加质量的总质量项,d11为纵荡的阻尼系数,u和u.分别为纵荡运动的速度和加速度,具体获得方法参考文献[18].
1.4.2 推进器荷载作用点位于底部的浮体运动方程 在实际工程中,动力定位系统的推进器一般安装于浮体底部,如图3(a)所示.因此,推进器合力作用在底部,如图4(a)所示.可进一步等效为过重心的控制力τt和附加纵摇力矩Mp,如图4(b)所示.图中 Mp=-τts.在此基础上,可以将控制力τt分解为水平方向的分力τs和竖直方向的分力τh,如图4(c)所示.

图3 不考虑推进器实际位置的推力作用Fig.3 Thrust action without considering the actual position of thrusters

图4 考虑推进器实际位置的推力作用Fig.4 Thrust action considering the actual position of thrusters
考虑动力定位推进器的实际位置,建立沙漏型浮体纵荡-垂荡-纵摇耦合运动方程如下:

式中:θ、q、q.分别为纵摇方向的角度、角速度和角加速度,z、w、w.分别为垂荡方向的位移、速度和加速度,F3和F5分别为垂荡及纵摇方向的环境荷载,m33、m55分别为垂荡、纵摇含附加质量的总质量项,m15、m51分别为纵荡、纵摇耦合质量项,s为推进器中心距浮体重心的距离,g33、g55分别为垂荡及纵摇回复刚度,d33、d55分别为垂荡、纵摇阻尼系数,d15、d51分别为纵荡、纵摇耦合阻尼项,τh为推进器在垂荡方向产生的推力.
2 推进器实际位置引发的问题和讨论
由于沙漏型浮体具有水线面面积和初稳性高较小的特性,纵摇的固有频率与推进器控制力的频率可能接近,从而导致浮体水平面内和面外的运动产生耦合作用,进而使纵荡和纵摇耦合运动响应明显增大,以至于无法满足实际工程的限位要求.因此,需要对推进器实际位置引发的问题进行分析和讨论.
2.1 考虑纵荡-垂荡-纵摇方向的控制荷载
数值模拟选为中国南海一年一遇海况(JONSWAP谱,有义波高 6.2m,峰值周期10.36s,形状因子3.3).针对是否考虑推进器实际位置的两种算例进行数值模拟.其中,控制策略中的Kp取2.0×106kg·s-2.参考船级社相关规范,文中选取纵荡运动响应限位要求为不超过水深的5%(本文选定工作水深为3 000m),纵摇运动响应幅值不超过5°(即纵摇极差值不超过10°),垂荡运动幅度不超过8m.将考虑推进器位置新模型和传统分析模型的沙漏型浮体纵荡和纵摇时程曲线展示如图5所示.进一步,对时程曲线进行分析,计算得到的沙漏型浮体运动响应统计如表1所示.

图5 传统分析模型与考虑推进器位置新模型的浮体运动响应时程曲线Fig.5 Time history curves of floating body motion responses with traditional analytical model and new model considering thruster position

表1 传统分析模型与考虑推进器位置新模型的浮体运动响应统计Tab.1 Statistics of floating body motion responses with traditional analytical model and new model considering thruster position
由图5和表1可知,与传统分析模型相比,考虑动力定位推进器实际位置的浮体垂荡运动响应变化不明显且满足垂荡运动定位精度的要求,而纵荡和纵摇运动响应均方差、极差均显著增大,且纵摇运动响应远大于工程实际的限位标准.因此,基于传统分析方法(不考虑推进器实际位置)进行动力定位系统设计会偏于危险.下面,将进一步讨论纵荡和纵摇运动响应过大的原因.
2.2 考虑纵荡-垂荡方向的控制荷载
在前文基础上,针对仅考虑纵荡-垂荡两自由度加控制荷载的动力学方程可表示如下:

通过数值模拟可以得到浮体纵荡、垂荡和纵摇运动响应统计值,见表2.从表中可以看出,推进器产生的垂荡方向分力使垂荡运动响应产生较小变化.此外,该垂荡方向的分力不会使浮体纵荡和纵摇运动响应产生明显变化.因此,推进器产生的垂荡方向控制荷载不是使浮体纵荡和纵摇两运动响应增大的主要原因.
2.3 考虑纵荡-纵摇方向的控制荷载
进一步,针对仅考虑纵荡-纵摇两自由度加控制荷载的动力学方程可表示如下:

通过数值模拟得到浮体纵荡、垂荡和纵摇运动响应统计值,见表3.通过对比表1和3可知,考虑推进器实际位置产生的附加纵摇力矩,会使浮体产生显著的纵荡和纵摇运动响应,引发较大纵荡和纵摇运动响应问题.
2.4 抑制纵摇运动响应的控制方法
针对由推进器实际位置诱发的纵荡-纵摇耦合问题,采用间接控制纵摇运动方程的方法来抑制纵摇运动响应,从而解决纵荡和纵摇角较大的问题,使得沙漏型浮体在控制力作用下能够满足定位精度的要求.

表2 考虑纵荡-垂荡方向控制荷载的浮体运动响应统计Tab.2 Statistics of floating body motion responses with surge-heave control loads

表3 考虑纵荡-纵摇方向控制荷载的浮体运动响应统计Tab.3 Statistics of floating body motion responses with surge-pitch control loads
基于式(1)的控制方法,在纵荡控制力中加入纵摇运动的阻尼和惯性力项,通过纵荡-纵摇方程联立,进而将阻尼和惯性力项间接作用于纵摇运动方程中,表达式如下:

其中τ′c为纵荡方向考虑纵摇运动项的控制力,b和a分别是增益常数.
进一步,考虑纵荡-纵摇两自由度加控制荷载的动力学方程可表示如下:

式中:纵摇阻尼项用于降低纵荡-纵摇共振时的运动响应;纵摇惯性力项用于改变纵摇固有频率,使其与纵荡固有频率相互远离,避免纵荡-纵摇耦合运动现象.
针对纵荡-纵摇耦合运动现象,通过数值模拟,对比考虑纵摇运动响应的控制方法应用前后的沙漏型浮体纵荡和纵摇运动响应,如图6所示.对时程曲线进行分析,计算得到的沙漏型浮体运动响应统计如表4所示.
由图6和表4可以看出,沙漏型浮体受到动力定位控制力作用后纵荡和纵摇运动响应均有明显降低,并满足定位精度的要求.因此,在纵荡运动方程中加入考虑纵摇阻尼和纵摇惯性力项的控制力作用能有效降低沙漏型浮体的纵荡和纵摇运动响应.进一步地,从沙漏型浮体控制力作用前后纵荡和纵摇运动的传递函数(见图7)可以看出,控制力作用于沙漏型浮体前,其纵荡和纵摇固有频率十分接近(分别为0.079、0.080rad/s),在控制力中的纵摇惯性力项作用下两者的固有频率相互分离(分别为0.070、0.120rad/s),从而直接避免了纵荡和纵摇运动耦合共振现象.综合考虑在纵荡控制力中加入纵摇阻尼项可以实现沙漏型浮体纵荡和纵摇运动响应大幅度降低.
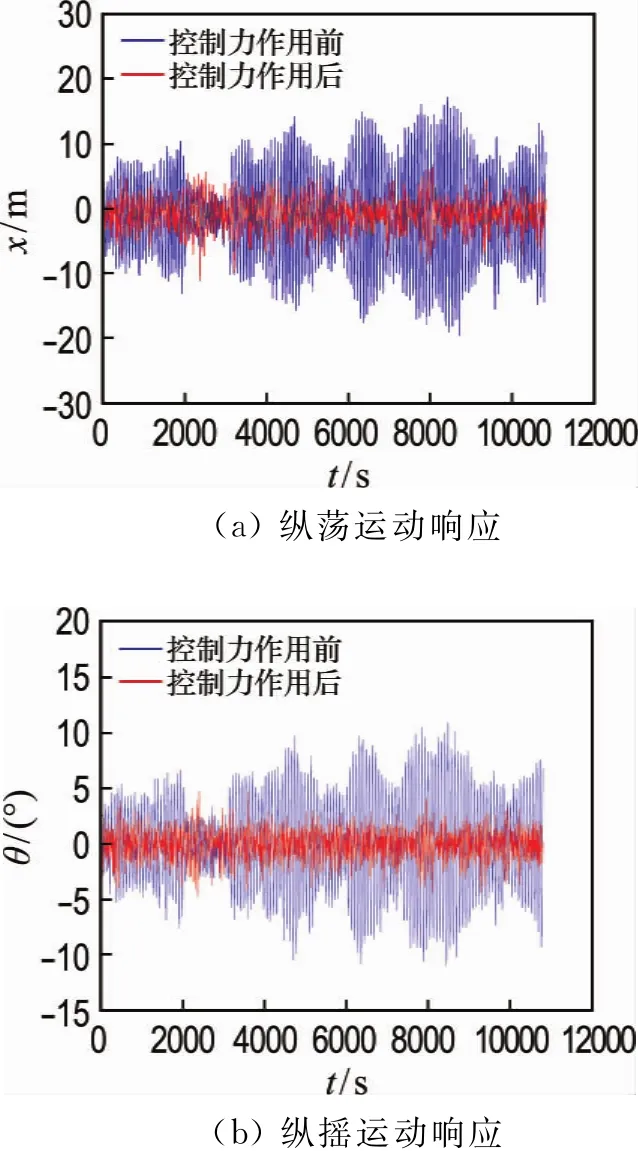
图6 沙漏型浮体控制力作用前后纵荡和纵摇运动时程曲线Fig.6 Time history curves of surge and pitch motions before and after control actions of sandglass-type floating body

表4 控制力作用前后浮体的运动响应统计Tab.4 Statistics of motion responses of floating body before and after control actions

图7 沙漏型浮体控制力作用前后纵荡和纵摇运动的传递函数Fig.7 Transfer functions of surge and pitch motions before and after control actions of sandglass-type floating body
3 结 论
(1)基于沙漏型浮体实际推进器的空间布置情况,提出了更为合理和符合工程实际的新型动力定位控制分析模型(推进器荷载作用点位于浮体底部).与传统模型相比,考虑推进器垂向分力作用对浮体纵荡和纵摇运动响应影响不大;考虑纵摇附加力矩作用时,纵荡响应均方差、极差以及纵摇响应均方差、极差均显著增大,远大于工程实际的限位标准.
(2)推进器的附加纵摇力矩使得沙漏型浮体模型的纵荡和纵摇运动固有频率接近,因此会发生共振现象,从而引发纵摇运动幅度较大的问题.所以基于传统分析方法(不考虑附加纵摇力矩)进行动力定位系统设计,会严重低估纵摇运动响应,使得设计方案偏于危险并且容易引发事故.在工程实际中,应采用更为合理的考虑附加纵摇力矩的动力学分析模型进行动力定位系统的设计.
(3)采用在纵荡运动方程中加入纵摇阻尼和纵摇惯性力项的控制方法,将纵摇阻尼和惯性力项间接作用于纵摇运动方程,从而直接削弱纵摇运动响应,并改变纵摇的固有频率,使纵摇和纵荡固有频率相互远离,进而使得沙漏型浮体的纵荡和纵摇运动响应明显减小,从而满足定位精度的要求.
猜你喜欢
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
地质装备(2021年2期)2021-04-23
舰船科学技术(2021年12期)2021-03-29
家庭影院技术(2020年6期)2020-07-27
水利与建筑工程学报(2018年4期)2018-08-21
四川水泥(2018年6期)2018-06-06
数学大王·低年级(2018年3期)2018-03-27
儿童故事画报·自然探秘(2017年2期)2017-09-26
儿童故事画报·自然探秘(2017年1期)2017-06-12
青年歌声(2017年12期)2017-03-15