新型TBM推进机构力传递性能分析
2018-11-01 03:43章登超王超飞
机械工程与自动化 2018年5期
李 业,张 静,章登超,王超飞
(华东交通大学 机电与车辆工程学院,江西 南昌 330013)
0 引言
硬岩全断面掘进机(Tunnel Boring Machine,简称TBM) 是一种集机、电、液、传感以及信息技术等多学科于一体的专门用于隧道开挖的工程设备[1-2]。TBM工作环境极其复杂,极限重载荷、大突变载荷以及强振动载荷都会造成其关键零部件损伤或失效。掘进机推进系统作为TBM关键子系统,是掘进过程中的关键装置,不仅需要完成推进工作,同时需要完成掘进过程中调姿、转弯、调向等功能[3]。若传力装置某些方面工作能力不足,将导致其不能够适应复杂的地质环境,因此提高其力传递性能显得尤为重要。清华大学刘辛军教授[4]以传动角的概念为基础,定义了评价并联机构运动/力传递性能的LTI(局部传递指标)、GTW(优质工作空间)和GTI(全域传递指标)。为解决推进系统在掘进过程中刚柔冲突这对矛盾,清华大学徐尤南博士[5]提出新的推进载荷顺应性设计理论与方法,所提出的理论从力与运动的耦合性、力与变形的耦合性以及弹性储能三个方面进行了评价,并以该理论为基础,设计开发了新型混联式TBM掘进机构。
本文将以搭建的新型TBM缩尺实验台重构后的推进机构为研究对象,首先运用SolidWorks对重构后的推进机构进行三维建模,其次基于机构运动耦合度指标对机构调向力与调向力矩进行分析,结合MATLAB对计算数据进行处理,得到调向力与调向力矩与推进位移关系图;最后以运动耦合度指标作为评价推进机构动力传递性能优劣的指标,对V型推进机构与Π型推进机构进行力传递性能评价,该指标对试验台的实验验证及工程应用具有重要意义[6]。
1 重构后推进机构三维建模
在SolidWorks中根据试验台的实际尺寸建立推进机构三维模型,如图1所示。该机构为(2×6SPS)并联机构,相邻的两个液压缸组成一个类似V字型的形状,故称为V型推进机构。其中动平台半径为390 mm,定平台半径为390 mm,动定平台间的距离为529 mm,推进液压缸的长度为543 mm,动定平台球铰分布如图2所示。图2中,A1~A12为定平台球铰编号,B1~B12为动平台球铰编号。Δγ为相邻两缸夹角,Δφ为相邻两小组间液压缸夹角。

图1 重构后推进机构三维模型
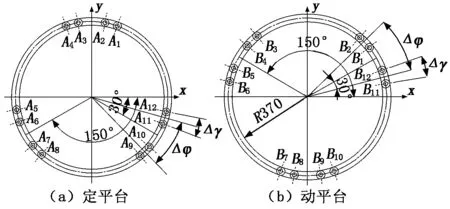
图2 动定平台球铰分布
2 V型推进机构运动耦合度
2.1 耦合力与耦合运动
规定在给定驱动力作用下,输出作用力与运动方向相同的力分量做功,与运动方向正交的力分量不做功,不做功的力即称为耦合力(如图3所示)。从运动角度分析,作用力在与作用方向相同的运动方向上做功,而在与其正交的方向上不做功,这种运动即是耦合运动(如图4所示)。
由图3可以看出,在输出力f中与运动v方向相同的力分量fm做功,与运动方向正交的力分量fc不做功。因此不做功的力fc即为耦合力。图4中,作用力f在与其运动方向相同的方向做功,而在与其正交的运动方向不做功,因此这种不做功的运动vc即是耦合运动。
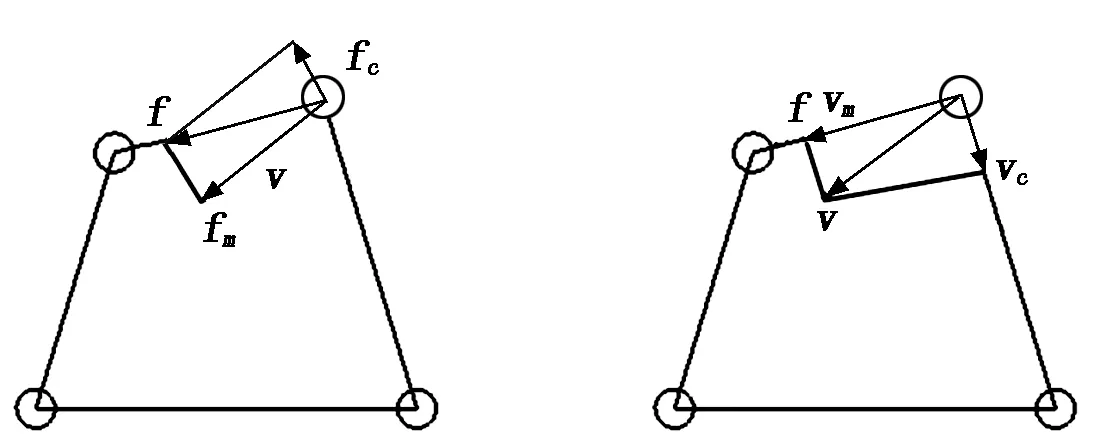
图3耦合力图4耦合运动
2.2 运动耦合度
运动耦合度是运动耦合性的衡量指标,对于并联机构,由于机构作用力分量与速度分量的量纲不一致,因此力矢量与运动矢量不能直接用力与速度的2—范数进行求解。因此根据并联机构运动学相关理论,引入螺旋量计算公式:
(1)
其中:ηv为动力传递指标值;Cv为机构的运动耦合度;F与V分别为广义力与广义速度;$F与$V分别为力螺旋与运动螺旋。在螺旋理论中,运动螺旋和力螺旋两旋量的互易积表示为该力在该运动方向上的功率。为了方便计算,可对广义力与广义运动进行等效处理,将其等效为赋范数线性空间,并计算相应的范数。可将推进机构耦合度计算公式变为:
(2)

式(2)即为式(1)的等效表达式。
3 V型机构运动耦合性分析
根据上述推进机构运动耦合性指标,将其作为设计指标对V型机构调向力与调向力矩进行分析,运用MATLAB编程得到其调向力与调向力矩,如图5、图6所示。由图5与图6可以看出:对于V型推进机构,当推进力与最大推力的比值达到0.7时,其水平调向力达到最大值0.2;当推进力与最大推力的比值达到0.3时其垂直调向力达到最大值0.18;而水平调向力矩与垂直调向力矩在推进力与最大推力的比值0.4时达到最大值。
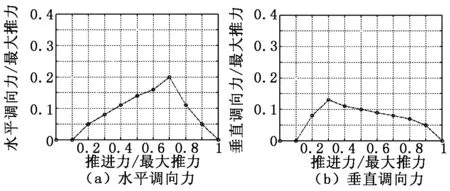
图5 V型机构调向力
通过对调向力与调向力矩的分析,运用耦合性指标可得出V型机构调向能力(即ηv),如图7所示,其中h为推进缸实际位移,H为推进缸最大位移。由图7可看出:机构刚开始掘进时水平调向能力最好,位移越大,水平调向能力越差;垂直调向能力表现为一种递增的趋势,说明位移越大,垂直调向能力越好。
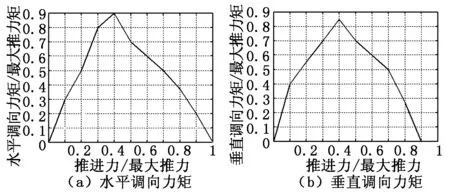
图6 V型机构调向力矩

图7 V型机构调向能力
对于V型机构而言,其关键设计参数是其动平台大小,而动平台大小则与V型机构的楔形角大小有关,楔形角即图2中A2B2与A3B3的夹角。因此分析在不同楔形角下V型机构运动耦合性指标的优劣值,找出其变化规律,对该机构而言尤为重要。上文已得到耦合度计算公式,借助MATLAB可得到如图8所示的4种不同楔形角下V型机构的运动耦合性指标的变化规律。通过分析可知,在给定的掘进机位移(210 mm)范围内,随着楔形角的变大,该机构的运动耦合度变小,而耦合度值越小,机构耦合性越小,有用功越多。因此,楔形角在一定范围内值越大,机构的运动耦合性能越优。
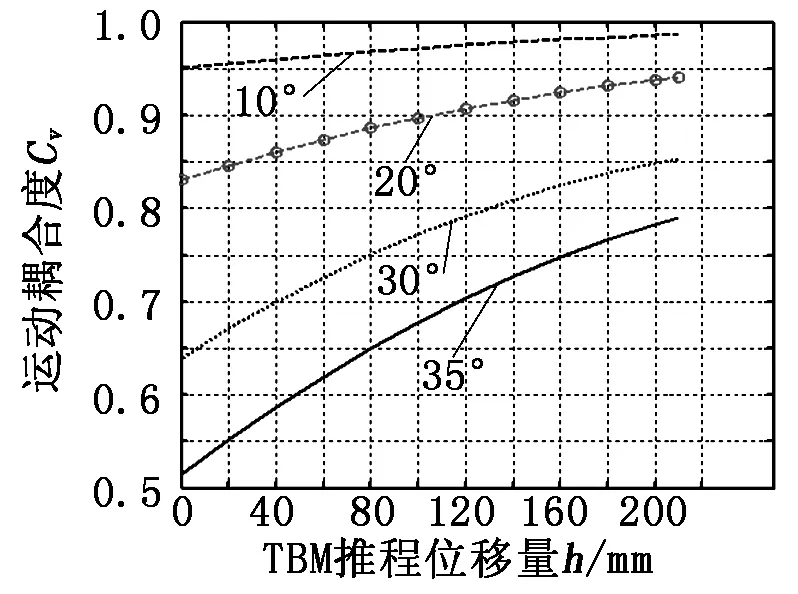
图8 不同楔形角下V型机构运动耦合度
4 两种典型机构动力传递指标评价
文献[7]已经对Π型推进机构误差变形以及顺应性做了分析,本小节将对V型推进机构与Π型推进机构各项指标值进行比较。Π型机构三维简图如图9所示。

图9 Π型机构三维简图
首先经过MATLAB计算比较两种机构调向力与调向力矩,如图10与图11所示。由图10可以看出:Π型机构的水平调向力与垂直调向力都为零,而V型机构水平调向力与垂直调向力都处在一个较优的水平。
由图11可以看出:V型机构无论是水平调向力矩还是垂直调向力矩其值都比Π型机构要高,大概是其的2倍左右。
图12为经过MATLAB计算得到的两种机构的调向能力比较。由图12可以看出:V型机构水平调向较高于Π型机构;垂直调向能力V型机构要明显优于Π型机构。

图10 两种机构调向力比较
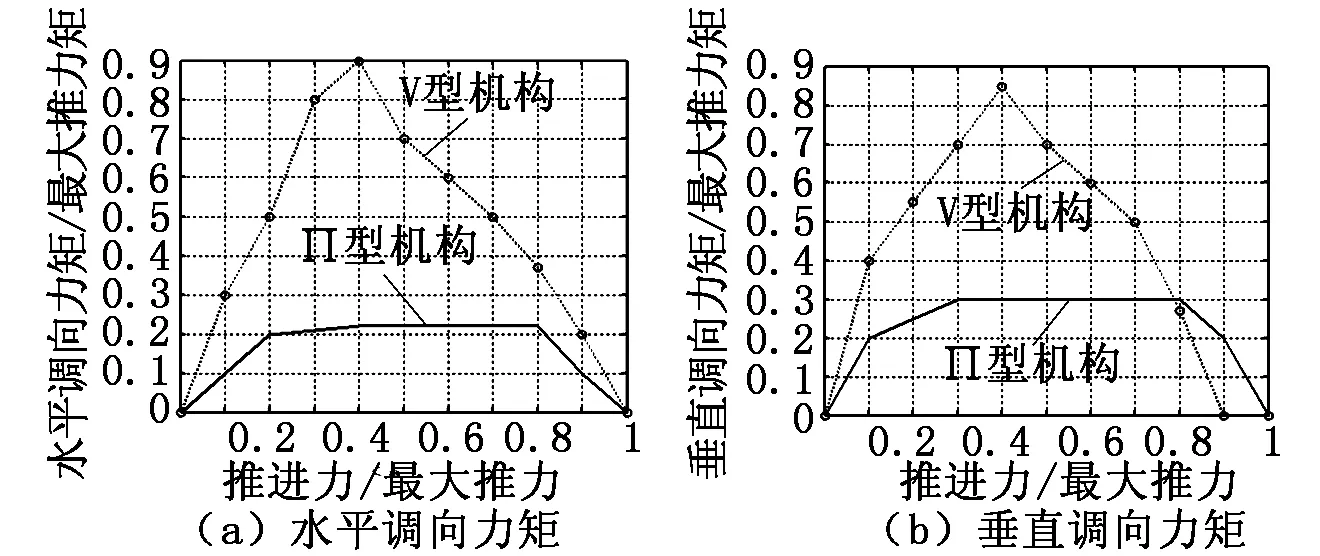
图11 两种机构调向力矩比较

图12 两种机构调向能力比较
通过比较上述两种机构的调向力与调向力矩以及两者调向能力可知,V型推进机构要优于Π型推进机构。下面将对两种机构运动耦合度进行分析,经过MATLAB编程计算得到两种机构运动耦合度的比较,如图13所示。由图13可看出:V型推进机构运动耦合度指标值要小于Π型推进机构的值。根据前面对运动耦合度的分析,可知值越小,机构的耦合性越小,则运动耦合性能越优。
最后对两种机构在掘进过程中动力传递性能进行分析。前述分析可知,若机构动力传递性能不足将影响掘进效率,更为严重者会造成机构重要零部件损伤。
图14为经MATLAB计算得到的两种机构推力传递效率的比较。由图14发现:在给定的推进缸位移范围内V型推进机构推力传递效率指标值要高于Π型推进机构,说明V型机构推力传递性能要优于Π型机构,证明了所用指标的正确性。

图13两种机构运动耦合度比较图14两种机构推力传递效率比较
5 结论
本文利用掘进机构运动耦合性指标,对新型TBM推进机构调向能力以及掘进过程中动力传递性能做了分析,并以该指标作为设计指标对比分析了两种典型机构动力传递性能的优劣,利用MATLAB编程计算,得到其关系变化图,可得出如下结论:
(1) 相比于Π型推进机构,V型推进机构调向力和调向力矩更好,其中Π型机构调向力为零,V型机构调向力矩大概是Π型机构的2倍左右,证明V型机构调向能力要优于Π型机构。
(2) 在给定的位移范围内,V型机构运动耦合度指标值要小于Π型机构,而耦合度值越小,机构的运动耦合性能越好,说明V型机构运动耦合性能要优于Π型机构。
(3) 比较了两种机构的推力传递效率,通过曲线图看出在给定的掘进机位移(210 mm)范围内,V型机构动力传递性能明显优于Π型机构,说明了该指标的正确性。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
防爆电机(2022年1期)2022-02-16
考试与评价·高二版(2020年1期)2020-09-10
中国特种设备安全(2019年11期)2020-01-16
阅读与作文(英语高中版)(2019年8期)2019-08-27
山东青年(2016年12期)2017-03-02
时代金融(2016年29期)2016-12-05
航天制造技术(2016年6期)2016-05-09
商场现代化(2016年1期)2016-03-18
重型机械(2016年1期)2016-03-01