
基于MEMS陀螺仪的顶管智能纠偏控制系统
2018-11-15 01:01万文松茆弘民吕庆洲唐飞飞唐素文
锻压装备与制造技术 2018年5期
万文松 ,翟 华 ,茆弘民 ,吕庆洲 ,唐飞飞 ,唐素文
(1.合肥工业大学 工业与装备技术研究院,安徽 合肥 230009;2.淮南联合大学,安徽 淮南 232038;3.安徽唐兴机械装备有限公司,安徽 淮南 232009)
在管道施工工程中,非开挖管道施工技术应用越来越多[1]。顶管施工以其适用土质广、施工精度高、使用管径范围大、综合成本低、环境污染小等优点被广泛应用[2]。由于地层土质变化、千斤顶推力不均、已拼管节轴线不准等因素影响,管体不可能完全按设计方向推进,产生姿态偏差[3]。为了保证掘进精度,必须对顶管机进行及时偏差纠正控制。
本文提出利用MEMS陀螺仪为测控单元,通过PLC控制系统构成顶管机纠偏系统,可以测量三个方向的姿态与方位,并实现自动纠偏功能。
1 系统布局
顶管智能纠偏控制系统是应用于顶管顶进施工过程中实时、自动测量顶管机姿态及计算顶管机位置,并与设计轴线比对后自动控制纠偏油缸纠正偏差。系统集成了计算机、自动测量、自动控制、数据通讯等自动化技术于一体。智能纠集控制系统布局如图1所示。
该顶管智能纠偏控制系统能实时获得顶管机的姿态并实时计算相对于隧道设计中心线的偏差,根据偏差发送相应的控制指令,为顶管机严格按照设计路线顶进提供重要保障,保证隧道施工的质量及隧道的准确贯通[4]。

图1 智能纠偏控制系统整体布局
2 系统组成
1.1 MEMS陀螺仪
MEMS陀螺仪是一种基于科里奥效应的惯性角速率传感器[5]。与传统机械陀螺仪不同,其内部无转动部件,不需要轴承,全固态装置,具有价格低、体积小、重量轻、可靠性高、易于数字化、智能化、抗大过载冲击、工作寿命长、低功耗、大量程等特点。已被证明可以用微机械加工技术大批量生产[6]。本文采用的MEMS陀螺仪采集的数据接入电脑显示为角度信息,传递数据仅用普通电缆即可,无需屏蔽。其部分参数如表1所示。
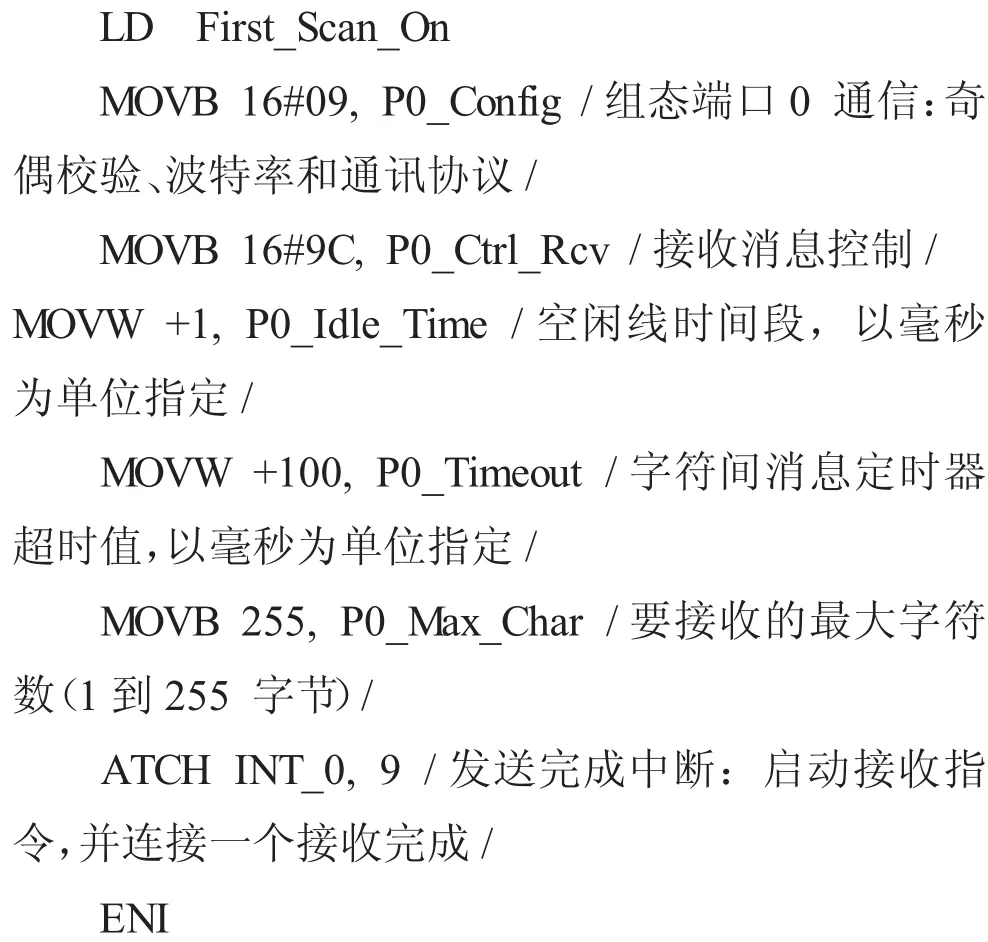
MEMS陀螺仪采用485自由口通讯方式,即通讯协议由用户自定义,陀螺仪角度读取命令数据帧格式如表2所示,其中数据域包含9个字节,分别为俯仰(Pitch),横滚(Roll)和方位(Heading)角度值,为压缩BCD 码[7]。本文使用S7-200SMART PLC采用RS485半双工串行通讯方式,与陀螺仪进行通讯获取角度信息,部分通讯程序如下:
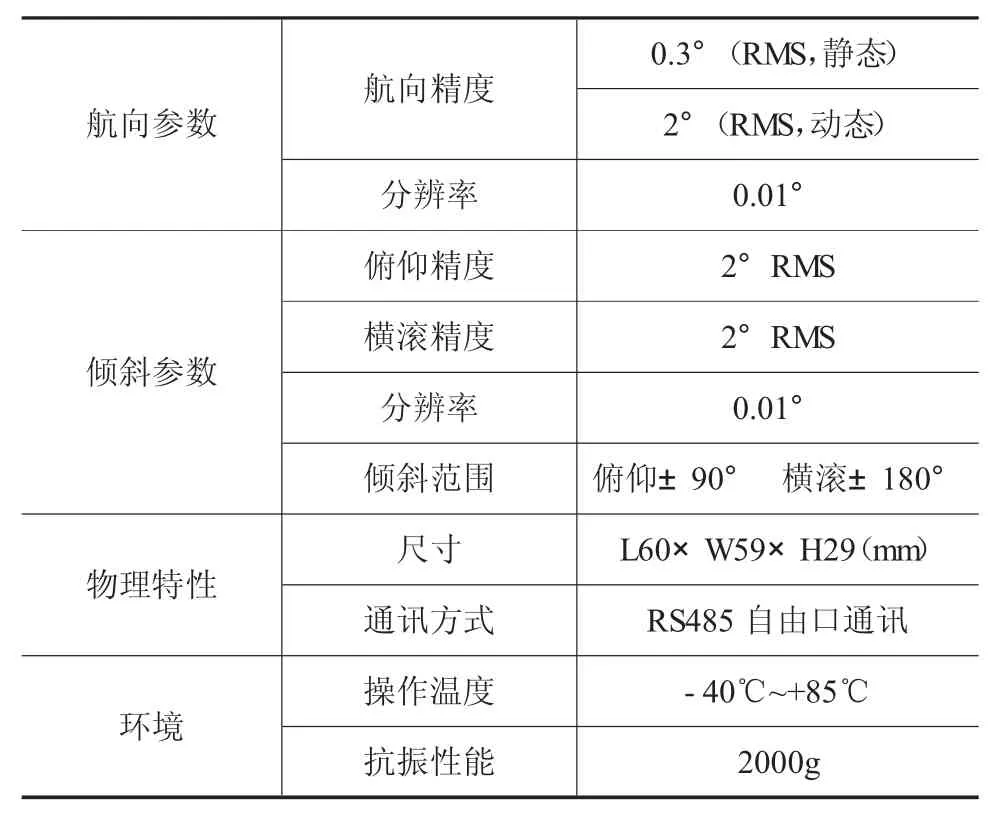
表1 MEMS陀螺仪参数
1.2 智能纠偏控制系统
本顶管机智能纠偏控制系统能为顶管机沿设计轴线掘进提供必要的精确信息并通过比对纠正偏差,是一套经现场使用验证的具有先进性的自动测控纠偏系统。系统基本流程如图2所示。
本系统不需要繁杂的电缆连接及硬件设施,其主要特点为:
①显示顶管机的姿态;
②计算并显示顶管机的位置,采用数字和图象两种形式显示;
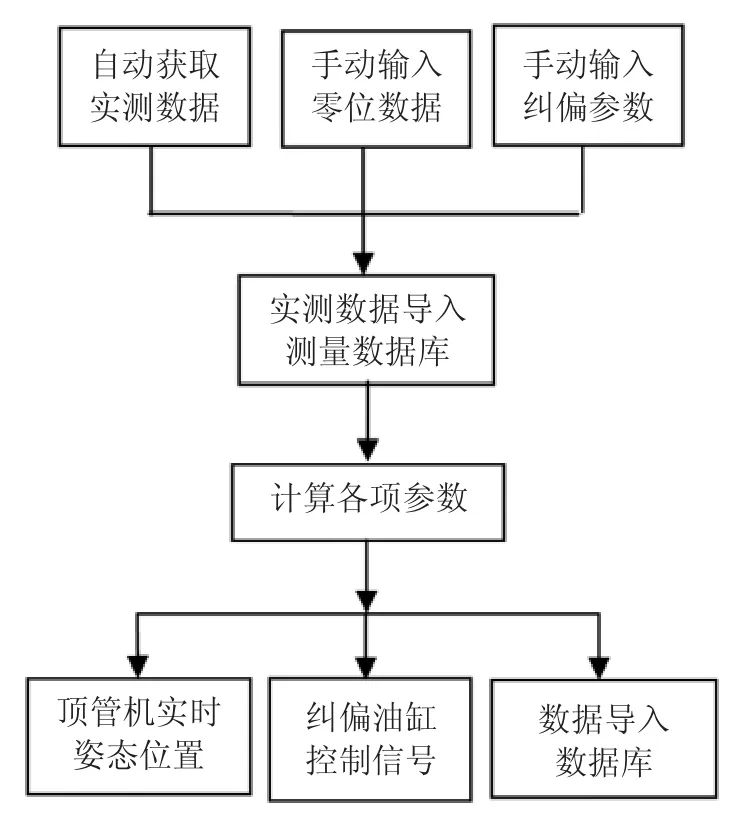
图2 智能纠偏控制系统流程图
③计算并显示顶管机实时位置与设计轴线的偏差;
④根据实时位置与设计轴线的偏差自动发送命令控制纠偏油缸动作以实现纠偏;
⑤完全通过控制箱对整套系统进行控制;
⑥对施工隧道的所有姿态偏差、位置偏差、纠偏动作等数据进行备份;
⑦关键操作设置密码保护,避免无关人员更改系统关键参数,如纠偏参数设置、零位数据等。
3 实验验证
为了验证顶管机智能纠偏控制系统的准确性,本文根据顶管机的结构设计了模拟顶管机实验架,并搭建控制系统和液压系统,进行智能纠偏控制系统的陆地实验。实验装置如图3所示,主要包括壳体、液压表、电磁阀、自动姿态测量系统、液压控制系统、电机、自动纠偏控制系统、液压泵站、导轨和纠偏油缸10个部分。
本实验首先完成了液压控制系统和纠偏控制系统的上下站通信。在确认液压系统正常后,设定四组偏差数据,观察并记录纠偏油缸的动作和纠偏效果。
第一组实验,当设定偏差为左偏0.5°、上偏2°时,左上、右上纠偏油缸伸出,纠偏过后左偏0.42°、上偏0.44°;
第二组实验,当设定偏差为右偏4°、下偏0.5°时,右上、右下纠偏油缸伸出,一次纠偏动作后,右偏差仍在需要纠偏的范围,右上、右下纠偏油缸继续伸出,纠偏过后右偏0.28°、下偏0.55°;
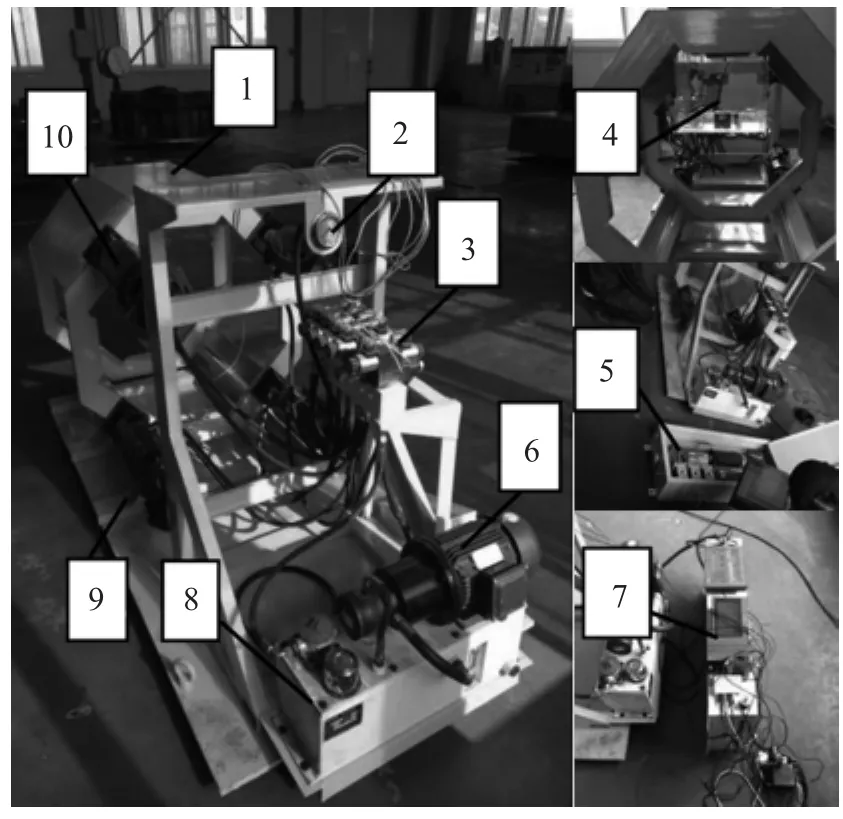
图3 纠偏控制系统实验装置1.壳体 2.液压表 3.电磁阀 4.姿态测量系统 5.液压控制系统6.电机 7.智能纠偏控制系统 8.液压泵站 9.导轨 10.纠偏油缸
第三组实验,当设定偏差为左偏1.5°、下偏1.5°时,左下、右下纠偏油缸先伸出,再伸出左上、左下纠偏油缸,纠偏过后左偏0.24°、下偏0.36°;
第四组实验,当设定偏差为右偏0.5°、上偏0.5°时,纠偏油缸保持。
实验表明,针对不同组偏差情况纠偏控制系统做出不同的纠偏控制动作,且纠偏效果显著,验证纠偏控制程序的正确性。
4 结论
设计了一套以MEMS陀螺仪为检测单元、以PLC控制器为核心的顶管智能纠偏控制系统。实验表明本系统可以实现实时采集三轴角度、实时计算轴线偏差、实时控制纠偏油缸运动的功能,且纠偏效果显著,能完成顶管机轴线自动纠偏施工,提高顶管质量。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
建筑施工(2021年12期)2021-09-14
科海故事博览(2021年27期)2021-01-02
建筑科技(2018年6期)2018-08-30
机械管理开发(2018年8期)2018-08-26
中国铸造装备与技术(2017年6期)2018-01-22
百科探秘·航空航天(2017年9期)2017-12-31
水利规划与设计(2017年6期)2017-07-18
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
