
一种升降滚床机构的设计
2018-11-20 08:17许丽虹许振宏
装备制造技术 2018年9期
许丽虹,许振宏
(1.上汽通用五菱汽车股份有限公司,广西 柳州 545007;2.柳州莫森泰克汽车科技有限公司,广西 柳州545616)
焊装车间的焊装主线一般采用往复杆输送机构来实现白车身的输送,但是该输送方式存在输送时间长,生产效率低,柔性差,难于实现多车型共线生产,标准化程度低,输送线设计及加工周期长,安装调试难度大,设备通用性低等缺点,已经不能满足当前汽车高效、柔性生产的发展趋势。因此,开发了一种更高效的升降滚床输送装置来实现车身的输送。
1 工作原理
高速滚床具有输送速度快、停止精度高的特点[1]。焊装生产线采用升降滚床与滑橇的输送方式,对白车身进行高效输送和精确定位。
升降滚床机构的工作原理是本工位的焊接工作完成后,升降滚床整体举升,将白车身抬离焊接夹具,滑橇水平运动将白车身输送至下工位,升降滚床整体下降,同时将白车身放置在焊接夹具上,机器人对白车身进行焊接,过程示意如图1所示。
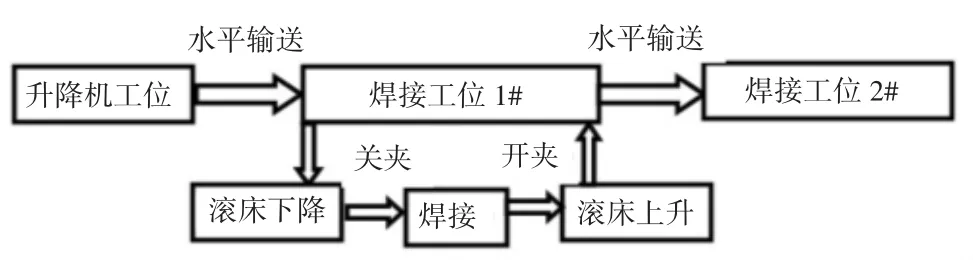
图1 升降滚床机构工作过程
2 结构设计
升降滚床主要由高速滚床、升降机构、滑撬定位组件三部分组成,结构如图2所示,现场实际运用如图3所示。
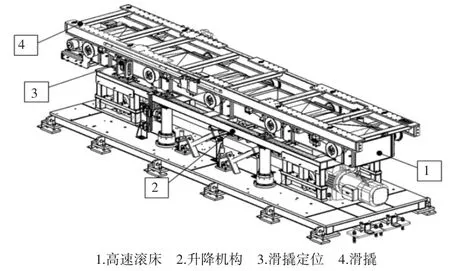
图2 升降滚床的结构
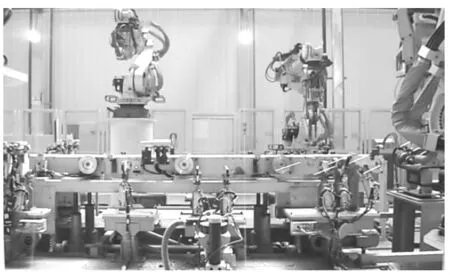
图3 升降滚床机构现场
2.1 高速滚床
高速滚床由电机、皮带轮、支撑架、检测开关、棍轴、导向轮、皮带、皮带张紧轮等组件组成。五组棍轴均匀布置在由矩形钢管焊接并精加工而成的支撑架上。电机设计在滑橇前进方向的一端,不占用两侧工装的空间,结构紧凑,且皮带的受力一致性好。高速滚床的结构如图4所示。
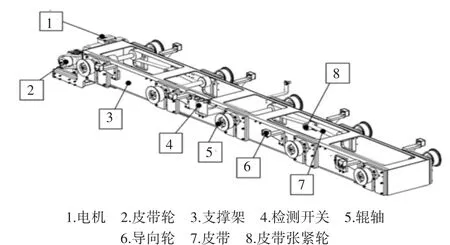
图4 高速滚床的结构
高速滚床利用摩擦传动原理来实现白车身水平方向的高速输送。电机启动,驱动与电机出轴直连的皮带轮转动,并通过皮带将动力传递给支撑架上的五组棍轴,固定在棍轴上包胶棍轮与棍轴一起旋转。滑撬通过撬体与包胶棍轮间产生的摩擦力在滚床上做高速运动。
2.2 升降机构
凸轮传动结构简单、紧凑,能方便地设计凸轮轮廓以实现从动件预期的运动规律[2]。升降机构采用凸轮传动结构,将凸轮的等速回转运动转变为升降台连续的升降运动。
升降机构由升降台、电机、减速机、凸轮摆臂、导向杆、安全托架、万向联轴器、检测开关、底板等组成。减速机一与电机直接连接,减速机一和减速机二安装在高精度的底座上并通过十字万向联轴器传递动力。四组凸轮摆臂机构直接安装在减速机侧面出轴上,保证了两个减速机出轴的同步转动。升降机构的结构如图5所示。
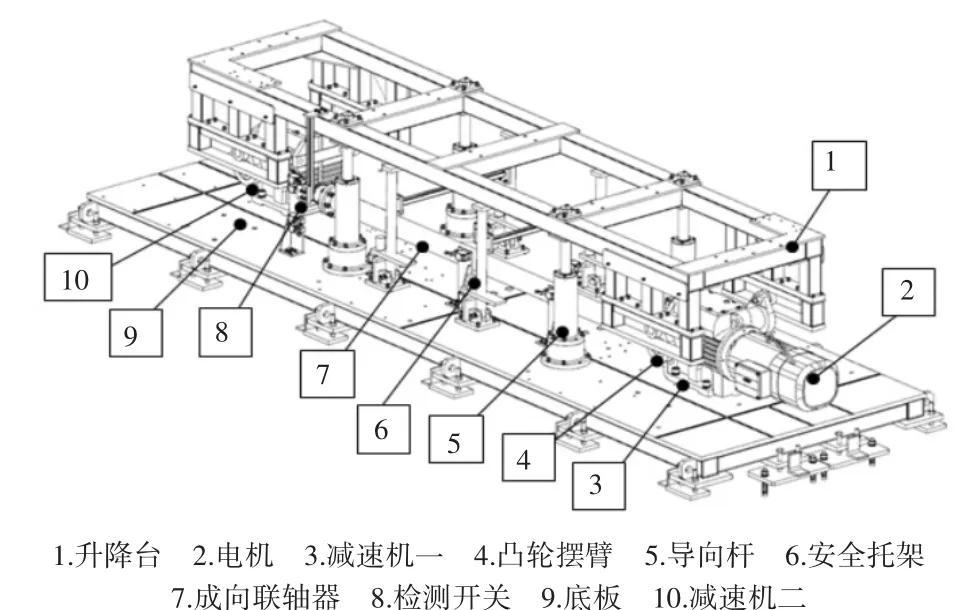
图5 升降机构的结构
升降机构的工作原理是电机启动,两个减速机带动四个凸轮摆臂作回转运动,摆臂上的轴承将升降台顶升。升降台通过4组导向杆进行精确导向,确保升降的平稳。到位检测开关检测到升降台上升到位后,电机抱闸,保持升降台的停止位置不变。
在维修时,将安全托架撑起,可以保证设备在断电状态下维修维护的安全。
升降机构采用结构简单的凸轮摆臂机构,结构紧凑,运动轨迹简单,零件易于加工,且加工精度易于控制。
2.3 滑橇定位机构
通过接近开关和机械机构定位相结合的方法来实现滑撬的精确定位。
在滚床侧面设计有轴承,对滑橇进行导向,控制滑橇的X向偏移,同时保证滑撬输送的平稳。在升降滚床上设计定位销,同时在滑橇上设计定位孔,通过定位销和定位孔的配合,保证滑橇在X、Y两个方向上的重复定位精度。
滑撬定位的工作原理是滑橇通过接近开关检测其到位后停止,滚床上的定位销上升并伸入滑橇的定位孔中,对滑橇精确定位,定位精度可达到±0.15 mm,其精度能够满足白车身的焊接要求。滑撬精确定位的结构如图6所示。
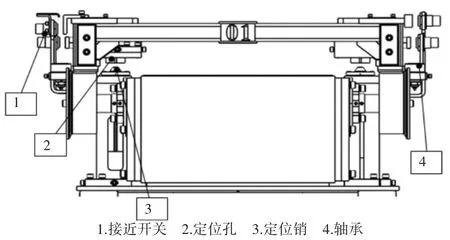
图6 滑橇精确定位的结构
3 电机选型计算
3.1 高速滚床电机选型
高速滚床的电机选用变频减速电机,可实现变频调速。所有电机通过PLC统一调整变频器来调整滑橇速度。滑橇匀速速度的计算公式如下:

S 为工位节距(m);a1为加速段加速度(m/s2);t1为加速段时间(s);V2为匀速速度(m/s2);t2为匀速时间(s);a3为减速段加速度(m/v);t3为减速段时间(s).
工位节距S=6 m,加速时间t1=1 s,匀速时间t2=3.8 s,减速时间 t3=1.2 s.由式(1)(2)可计算得滑橇匀速速度为1.22 m/s.
滚床与滑橇不存在打滑现象,故滚床包胶轮外径的线速度为1.22 m/s.滚床上的皮带轮与电机上的皮带轮直径相同,其传动比为1∶1,包胶轮和皮带轮均通过键连接在传动轴上,其转速相同。电机的输出转速计算如下:

V1为包胶轮外径线速度;R1为包胶轮外径(m);n1为包胶轮转速(r/s);n2为滚床皮带轮转速(r/s);n3为电机皮带轮转速(r/s)。
白车身重量为500 kg,滑撬重量为800 kg,电机效率为0.8,功率安全系数为1.5,摩擦系数取0.1.电机功率计算如下:
P1为实际消耗功率(kW);μ为摩擦系数(取0.1);m1为白车身质量(kg);m2为滑橇质量(kg);V 为滑橇匀速速度(m/s);P为电机功率(kW);η 为电机效率;s为电机安全系数。
电机的输出扭矩主要是用来克服滑橇与滚轮之间的摩擦力,故计算公式如下:

M为电机输出扭矩(N·m);m1为白车身质量(kg);m2为滑橇质量(kg);μ为滚轮与滑橇的摩擦系数(取 0.1);R为皮带轮外径(m)。
3.2 升降机构电机选型
升降减速机的计算跟水平电机的计算方法基本相同,所不同的是升降台的速度与减速机的输出速度是成三角函数关系的。图7所示为凸轮摆臂的速度分解图。图7中的1为升降台,2为凸轮摆臂。

V1为升降台升降速度(m/s);V为摆臂线外端速度(m/s);α为速度夹角;n为电机输出转速(r/s);R为凸轮摆臂外端半径(m)。
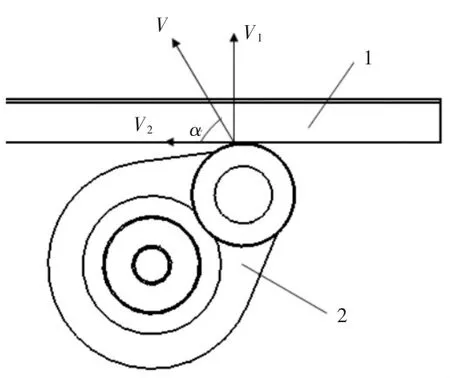
图7 凸轮摆臂速度分解图
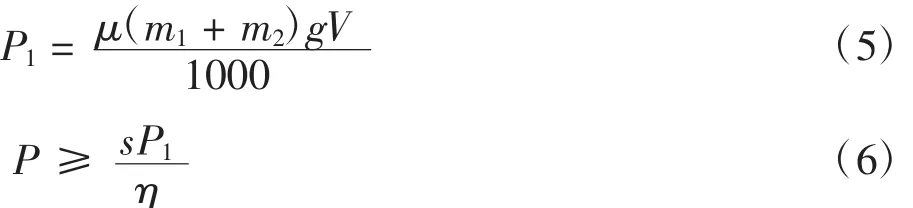
白车身重量为500 kg,滑撬重量为800 kg,升降台的质量为700 kg,电机效率为0.8,功率安全系数为1.5.电机功率计算如下:
P1为实际消耗功率(kW);m1为白车身质量(kg);m2为滑橇质量(kg);m3为升降台质量(kg);V 为升降台速度(m/s);P为电机功率(kW);η为电机效率;s为电机安全系数。
电机的输出扭矩主要是用来克服重力力,计算公式如下:

M为电机输出扭矩(N·m);m1为白车身质量(kg);m2为滑橇质量(kg);m3为升降台质量(kg);R为凸轮摆臂的外径(m)。
SEW品牌电机能耗低,性能优越,振动小,噪音低[3],所以电机品牌选用SEW.根据以上公式、数据计算,并考虑电机安装维护的方便性,高速滚床电机型号为R57DRE132S4BE5HRTH,升降机构电机型号为S97DRS132M4BE11HR.
4 结束语
本设计采用升降式高速滚床与滑撬的输送方式代替传统的往复杆输送机构,减少白车身的输送时间,提高生产效率,同时实现多种车型柔性化生产,提升车间自动化率,厂房、公用动力设施和通用设备一次性投入,设备利用率高。
本设计已经成功运用于焊装车间的焊装主线,并推广至补焊生产线等生产线。
猜你喜欢
机械制造(2022年6期)2022-09-01
机械制造(2022年6期)2022-09-01
山东冶金(2022年1期)2022-04-19
演艺科技(2021年5期)2021-06-05
演艺科技(2020年5期)2020-07-15
发明与创新·中学生(2019年3期)2019-03-20
中国金属通报(2019年5期)2019-01-03
新商务周刊(2018年12期)2018-12-08
山东工业技术(2016年15期)2016-12-01
筑路机械与施工机械化(2015年11期)2015-07-01
