水土保持无人机遥测成果数据精度检测
2018-11-22 07:42李月宁
东北水利水电 2018年11期
常 诚,李月宁
(水利部松辽水利委员会,吉林长春130021)
1 水土保持无人机应用概述
无人机遥测是松辽流域应用无人机技术充实水土保持工作成果的专有名词,是指利用无人机设备在允许空域内完成对地物的低角度连续性数据采集,并通过数据拼接软件生成带有地理信息属性成果数据的过程。将无人机遥测系统应用到水土保持工作领域,对松辽流域水土保持监督性监测、水土流失趋势预测、小范围高精度测绘及遥测影像图斑精细化均起到技术示范及推广作用。
2 精度报告编制目的
由于行业应用的无人机遥测设备采用的传感器属于普通摄影器材,较之卫星遥感测绘的传惑器,存在更大的光学系统畸变误差。另外,后期像控点的标定及成果数据量测的误差,形成了影响无人机遥测成果数据与实际地物大小之间存在差异的主要因素。因此,为保证无人机遥测数据的实用性和准确率,采用针对水土保持关注的线状、面状及三维指标,提取无人机遥测成果数据与实际测量数据集合的方法,总结无人机遥测成果误差范围,为成果数据可靠性提供理论依据。
3 无人机遥测误差来源
3.1 仪器误差
无人机通常搭载采用传统CCD或COMS感光元件的民用摄影设备或定制摄影器材,并非正方形及正交型感光单元,感光单元光学系统自身存在径向畸变差和切向畸变差,此类光学畸变的存在使测量成果量化过程存在一定误差,见图1。

图1 镜头畸变带来的仪器误差
3.2 特征点匹配不足
无人机航拍数据的航向及旁向影像拼接过程中,特征点匹配不足对成果数据的生产带来一定误差,可供匹配的特征点的多少会随着地表信息不同而发生变化,当拍摄影像为明显地物刺点,如建筑、树木等棱角分明、影像反差较大的影像时,可提取足够的特征点,当拍摄影像存在大面积水面、积雪等纹理重复率高或影像拍摄存在质量问题时,将无法提取足够的特征点,从而造成影像拼接错误导致的误差。
3.3 外界因素
由于天气状况影响飞行器姿态和成像质量所产生的误差,以及云层厚度对GPS定位产生的定位误差。
3.4 内业误差
成果输出过程中,由于成果数据人工解译鉴别能力、解译标准不固定等因素带来的内业误差。
4 遥测数据精度检测
4.1 检测指标
松辽流域水土保持无人机遥测成果数据后期量测,可分为线状、面状和三维数据的信息提取,三类数据涵盖水土保持领域关注的全部指标数据(详见表1)。为保证本精度检测报告数据详实,以传统实地测量为基础,对比多旋翼和固定翼两种不同类型无人机设备,获取相同指标下的无人机遥测数据,对表格中所有指标进行精度检测,并汇总大数据分析无人机遥测数据精度范围。

表1 无人机遥测数据精度检测指标范围
4.2 精度检测方法
运用多旋翼和固定翼两种类型无人机,分别对线状、面状及三维指标进行遥测,无人机设备参数设置,如相机分辨率、镜头焦距、飞行高度、航向及旁向重叠率及遥测时段一致。三种检测要素分别选取5个不同规模的检测指标,分别完成10次无人机遥测工作,并采用Pix4Dmapper专业无人机遥测数据处理软件完成成果输出,10次量测取均值记录,最终,结合现场实际测量生成对照数据,计算对照数据的误差量变化情况,说明无人机遥测成果误差范围。
4.3 指标对照
线状指标分别获取了某项目弃渣场挡墙长度信息、高度信息、临时道路长度信息、宽度信息及农发项目地埂植物带长度信息,共计5组线状指标长度数据,见表2。
面状指标分别获取了某生产建设项目拌合站面积信息、梁场面积信息、侵蚀沟治理工程治理面积信息、农发项目水平梯田面积信息及封禁治理面积信息,共计5组面状指标面积数据,见表3(多旋翼无人机无法完成超过0.5 km2以上面积的无人机遥测工作)。
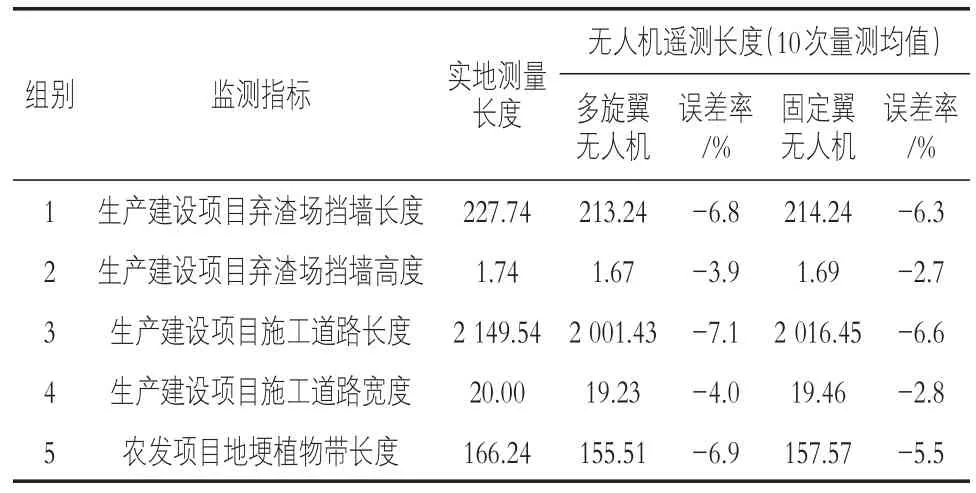
表2 线状信息误差率m

表3 面状信息误差率km2
三维指标分别获取了某生产建设项目1号、2号、3号弃渣场(均为平地弃渣)弃方量信息及4号、5号取土场(均为坡面取土场)取土方量信息,共计5组三维指标体积数据,见表4。

表4 三维信息误差率 万m2
4.4 对照结果分析
通过无人机遥测和实地量测数据对照,得出以下分析结果:
1)通过对水土保持监测指标的量测,多旋翼及固定翼无人机输出数据均小于实际发生的量。
产生这一误差的原因主要是由于采用的低空摄影设备镜头的焦距为广角,自身的径向畸变差和切向畸变差为负值,为保证影像能够重叠拼接,在镶嵌融合过程中畸变矫正不足导致的误差。
2)固定翼无人机输出成果相比多旋翼无人机输出成果更加接近实际测量数据。
由于固定翼无人机在低空摄影全过程中为自动航迹规划,保证了航向重叠率和旁向重叠率固定不变,数据处理冗余度较低,成果输出更稳定。而多旋翼无人机采用手动操作,相邻影像重叠率无法达到最佳标准,导致特征点匹配不足导致的误差。
3)数据量越少,误差越小。无人机所采集的GPS信息通常为米级设备,拍摄的单张影像误差较大,连续拍摄导致误差累计增多。
4)线状指标和面状指标提取后,成果数据误差在8%以内。
5)三维指标量测误差需根据测量基准面判断误差情况。
选择的1号和3号为平地弃渣,是为了减少漏掉弃方量,测量基准面容易勾绘,因此三维指标测量误差较小,误差率不超过10%。
其他编号弃渣场和取土场均为沟道或坡面扰动,由于缺少对原始地貌的掌握,无法准确勾绘测量基准面,或圈定扰动范围生成的曲面会相对减少或增多一部取弃方量的计算。因此误差值较大,误差结果仅可作参考用。
5 遥测数据精度提高方法
5.1 采用高精度GPS
传统GPS定位误差通常为米级,数据获取过程中,这种米级误差存在于每张对地航拍照片中,成果数据影像覆盖面积越大,影像存在的内误差越大,误差形变越复杂。因此,建议采用更高精度的GPS定位系统或RTK,更加准确获取无人机对地影像中心点坐标,以减少GPS偏移带来的误差。
5.2 增加像控点矫正
在无人机遥测数据获取完成后,利用差分GPS建立地表特征地物坐标提取,用于校准无人机成果数据为绝对精度数据,降低由于传统GPS误差带来的累计误差。地面像控点设置数量与成果数据精度成对数函数增长关系(如图2)。

图2 像控点矫正无人机遥测成果数据精度关系图
5.3 提高前期工作质量
1)提高影像重叠率。在实地踏勘基础上,以区域历史遥感影像数据为辅助信息,掌握被遥测区域总体地形地貌、土地利用等基本情况,设计飞行航迹,重点设置飞行起降点、飞行高度、影像分辨率、影像重叠率和飞行架次。
航向相邻影像重叠率不低于75%,旁向相邻影像重叠率不低于65%。
2)剔除不参与特征点匹配的地物。为避免如大面积水面、沙地等低特征点及移动物体参与后期成果影像运算,应在数据处理前提前剔除此类地物,降低成果数据输出过程冗余度、减少高程数据误差及正射影像模糊的拉花效应和点云数据偏差等现象。
5.4 遥测数据处理软件
目前无人机航测影像的属性信息都存在仪器设备因素带来的误差,因此为了成果数据的准确、可用,选择的无人机遥测数据处理软件应具备影像获取设备畸变数据库及飞行轨迹读取功能,可对航测影像属性误差进行过滤和矫正。虽然此类误差并不能完全清除,但数据处理完成后,软件自身生成的精度均能达到厘米级要求。
5.5 提高解译标准
1)精细化解译。无人机遥测数据正射影像的解译需在1∶200比例尺以上解译;成果数据解译图斑的勾绘应封闭,图形应建立拓扑关系;图斑边界勾绘偏差不超过2个像元或2个栅格。
2)投影坐标统一。无人机遥测成果数据应与基础底图及解译软件设置的投影坐标一致。
6 结论
综上所述,无人机遥测成果相比实际量测,存在一定程度的误差,长度、面积等二维指标量测误差可控制在8%以内,三维指标量测时在不考虑基准面和原始地貌的基础上误差可控制在10%以内。根据(SL592-2012)《水土保持遥感监测技术规范》要求,水土保持遥感监测调查中,按照图像解译质量控制要求,图像判对误差需控制在10%以内。因此,松辽流域无人机遥测成果误差满足水土保持工作要求。
猜你喜欢
中国水土保持(2022年7期)2022-07-14
水土保持通报(2021年1期)2021-04-16
河南水利年鉴(2020年0期)2020-06-09
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
摄影之友(影像视觉)(2017年10期)2017-11-07
河南水利年鉴(2017年0期)2017-05-19
现代工业经济和信息化(2016年6期)2016-05-17
癌变·畸变·突变(2014年2期)2014-03-01
河南科技(2014年16期)2014-02-27