
利用SAR图像匹配的弹体定位新方法
2018-12-07 09:08李晴晴党彦锋丁金闪
西安电子科技大学学报 2018年6期
梁 毅,李晴晴,孙 昆,党彦锋,丁金闪
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
惯性导航系统(Inertial Navigation System, INS)可不依赖外界信息而获得弹体的运动参数,较广泛地用于中远程导弹制导中.但由于外部干扰和弹体结构偏差,惯性制导误差会随时间积累,从而影响末端交接班精度.合成孔径雷达(Synthetic Aperture Radar, SAR)[1]全天时、全天候工作的优势使其在军事、民用等领域有着广泛的应用,弹载合成孔径雷达先获取高分辨二维实时图[2],然后与预先制备好的基准图进行匹配[3]得到场景中特征点的位置信息,从而解算出弹体位置,可以修正惯导误差及弹道偏差,引导弹体飞向目标区域.将制导技术和成像技术相结合的弹载合成孔径雷达景象匹配制导已成为精确制导重要的发展方向之一.
针对弹体末制导阶段定位问题,文献[4]结合飞行运动的规律,基于参数信息构造了一个多项式模型用于平台定位,但该方法依赖采样时刻的平台定位精度,不适合长时间飞行轨迹的估计.文献[5]建立了基于匹配点多普勒差和距离差的定位模型,但是俯冲阶段速度矢量和波束视线组成的平面与数据录取的平面不在同一平面内,使得多普勒信息与匹配点不对应,从而导致该模型不适合末制导弹体定位.文献[6]以弹体实际位置为顶点构建欧拉四面体模型,但该模型需要准确的斜距信息,当斜距存在误差时,会导致定位误差较大.文献[7]利用弹载合成孔径雷达的距离多普勒信息及惯导系统的测量值来确定弹体的经纬度坐标,但该方法只选取一个地面特征点,在惯导测量值误差较大的情况下无法对定位结果进行有效修正.针对弹载合成孔径雷达定位参数,笔者详细分析了末制导阶段弹体定位模型,在利用景象匹配获取合成孔径雷达图像中多特征点位置信息的基础上,提出了一种基于高斯牛顿-遗传混合算法的弹体定位新方法,提高了对定位参数误差的鲁棒性.
1 弹体定位模型
在弹载合成孔径雷达导引头末制导阶段,为了使导弹具有一定的机动转弯时间,一般需要在大斜视情况下成像.为了提高实时性及简化处理流程,通常采用聚束或条带模式进行子孔径成像以实时获取目标区域的二维图像,然后进行几何形变校正,可得到地平面的合成孔径雷达实时图[8].将实时图与基准图进行匹配可获取特征点的经纬度信息,进一步解算弹体位置,对弹体飞行轨迹进行修正.
图1 弹体定位几何模型
常用的弹体定位模型是以成像中心时刻弹体在地面的投影点作为成像坐标系原点.为了使坐标系的建立不依赖弹体的位置信息,笔者构建一种如图1所示的弹体定位几何模型.在图1中,以地面中任意点O为北天东坐标系OX2Y2Z2(OY2轴为正北方向)与成像坐标系OX3Y3Z3的公共原点.假设在一个子孔径积累时间内,弹体以初速V和加速度a从M点运动到N点,在方位慢时间中心时刻,导弹位于Q点,其在地面投影点为Q′,波束中心射线与场景中心的交点为P1,Q点到特征点Pi的距离为Ri,弹体高度为h0,此时对应的斜视角为θs,方位角为α(波束在地面投影与OY3方向的夹角).定义γ为偏航角,使北天东坐标系OX2Y2Z2绕Z轴顺时针旋转γ角,得到成像坐标系OX3Y3Z3.
景象匹配后可得到一系列特征点Pi(i=1,2,…,n)的经纬度,其中n表示特征点个数,几何校正后可得到弹体中心时刻位置Q点到特征点的距离.由于笔者需要在成像坐标系下构建以斜距信息为基础的非线性方程组,而经景象匹配后,特征点的位置信息是由地心坐标系下的经纬度表示的,两者信息不统一,无法直接构建非线性方程组.因此,为了实现精确定位,需要进行坐标系转换,将地心坐标系下特征点的经纬度信息转换到成像坐标系中以坐标表示其位置信息.由于篇幅限制,具体的转换关系不再赘述.
2 基于改进高斯牛顿遗传混合算法的定位新方法
假设特征点Pi的坐标为[xi,yi,zi]T,待求弹体s的坐标为[xm,ym,zm]T,以斜距信息构建如下所示的数学模型:
(1)
解算该模型的方法主要分为两类: 一类是以传统牛顿法[9]为代表的经典算法,具有快速的局部收敛能力,但计算量大; 一类是以传统遗传算法[10]为代表的智能进化法,通过模拟自然进化过程搜索最优解,具有全局寻优的能力.笔者综合经典算法和遗传算法的优点,设计了一种新的高斯牛顿-遗传混合算法解算弹体位置坐标,主要包括初始种群选取、适应度函数设计、选择、交叉、变异这5个步骤.其中,采用锦标赛选择作为选择算子; 选择结束后,保留适应度最优个体、剔除适应度最差个体,避免当前最优个体被后续算子破坏的可能性; 交叉操作可以增大种群的离散程度,笔者设置一个交叉因子对被选择的个体进行算术交叉.由于初始种群选取、适应度函数设计和变异操作对最终结果影响最大,下面针对这3项进行详细说明.
(1) 初始种群选取.传统遗传算法往往对初始种群的选取不加约束,而遗传算法的性能在很大程度上取决于初始种群选取是否恰当[11].针对此问题,预先设定一组弹体位置作为初始种群,结合图1所示的几何模型,当弹体位于Q点时,根据多普勒信息、航迹信息及场景中心点的斜距信息,可求得弹体在成像坐标系下的坐标[xq,yq,zq]T为
(2)
其中,λ为波长,fd为多普勒中心频率,[x1,y1,z1]T为P1在成像坐标系中的坐标.由于多普勒信息和航迹信息均不可避免地存在误差,因此上式得到的弹体坐标也存在误差,称其为弹体粗坐标.假设弹体真实位置位于以粗坐标为中心、三维方向各偏移 ±Del(Del表示偏移量)的区间内,即可得到
xm∈[xq-Del,xq+Del],ym∈[yq-Del,yq+Del],zm∈[zq-Del,zq+Del] .
(3)
将式(3)作为初始种群的取值区间,可缩小搜索范围.为了避免早熟,需要使个体的三维信息在各自的取值区间内呈最无序状态分布,而熵极大化准则[11]通过寻找一个和已有的关于状态集合的先验信息一致的概率分布能使误差最小,是不确定状态下最合理的判定尺度.由于在有限区间内,均匀随机取样可以使样本的熵值最大,故笔者在取值区间里均匀随机选取一定数目的个体组成初始种群.
(2) 适应度函数设计.传统遗传算法常以均方误差函数作为适应度函数.由于笔者在变异过程里嵌入了高斯牛顿法,而高斯牛顿法需要通过不断的对弹体坐标迭代修正使其逐渐接近最优解,因此为了保证混合遗传算法在迭代过程中始终保持同一个进化方向,笔者将适应度函数设计为高斯牛顿法的弹体坐标修正函数.令[xm0,ym0,zm0]T为个体代表的弹体位置s0的坐标,弹体位置修正后记为s1.将式(4)在s0处进行泰勒级数展开:
在小残量情况下,可以忽略展开式(5)中的二阶信息项.令lΔ=s1-s0,表示弹体坐标修正函数,b为函数fi(xm,ym,zm)在s0处计算一阶导的矩阵形式,把s0代入函数ri= [(xm-xi)2+ (ym-yi)2+ (zm-zi)2]1/2,可得到预测斜距值ri0,w表示实际斜距参数Ri与预测斜距的差值.对lΔ进行最小二乘估计:
lΔ=(bTb)-1bTw,
(6)
lΔ越小,表明弹体位置坐标需要修正的程度越小,即越接近最优值.
(3) 变异算子.传统遗传算法鲁棒性差的原因之一是变异算子对个体的干扰方向过于随机,优秀的进化机制应具有使种群定向变异的能力,使种群朝着更优的方向进化又不至于发生早熟.考虑到常用的牛顿法局部收敛能力很强,但需要计算非常耗时的黑塞矩阵,不利于工程应用.针对此问题,笔者将不需要计算黑塞矩阵的高斯牛顿法[12]作为遗传算法的变异算子,在兼顾了高斯牛顿法局部收敛和遗传算法全局寻优的优点的同时,大幅度减少了计算量,体现了收敛性、鲁棒性和时间复杂度之间的平衡.
3 定位误差分析
3.1 特征点个数与位置选取
在理论上,根据数学模型式(1)求解弹体位置坐标时只需要3个特征点.但弹载合成孔径雷达景象匹配过程中通常存在匹配误差,即使在精准匹配的情况下,几何形变校正后得到的斜距信息也存在误差,因此需要利用多个特征点构建非线性方程组来克服匹配误差和斜距误差的影响.如果选取过多的特征点构建非线性方程组,会造成方程组过于庞大,计算复杂度高,难以满足实时性的要求.经过大量的仿真实验发现,选用5~10个特征点构建方程组,既可以精确地解算出弹体位置,又可以满足实时性需求.
在笔者所提方法中,特征点的位置选取关系到非线性方程组能否快速收敛.在图像输出的斜距矩阵中,场景中心点对应的斜距误差最小,故实际应用时,先选取场景中心点P1作为一特征点,然后选取另一特征点Pi,使之满足∠P1QPi值最大,如图1所示.依此类推,在P1点周围选取合适个数的特征点构建方程,可得到方程组的最优解.
3.2 斜距误差与匹配误差对定位精度的影响
(7)
对式(7)等号两边求全微分,可得

(8)
将式(8)等号两边移位变形后,可写成矩阵形式A·SΔ=N·LΔ,记
(9)
于是,弹体平台位置误差SΔ=(ATA)-1ATN·LΔ,误差协方差矩阵U(SΔ)为

4 仿真数据验证
为验证笔者所提方法对弹体定位的有效性,下面通过仿真实验进行说明.如3.1节分析,在仿真中选取5个特征点构建数学模型,具体的仿真参数如表1所示.令Δx、Δy、Δz分别表示斜距或匹配存在误差时弹体坐标相比于真实位置的三维偏差,定义定位误差为 (Δx2+ Δy2+ Δz2)1/2.

表1 仿真参数
4.1 斜距误差对定位精度的影响
由式(10)可知,斜距误差会影响弹体定位精度.设定6组不同的场景中心斜距,在每一组场景中心斜距下选取5个不同的特征点,具体选取规则见3.1节.其中,每个特征点对应的斜距误差服从均值为4、方差为1的高斯随机分布,图像分辨率为 3 m,采用传统方法[4]和文中方法得到的定位误差如图2(a)所示.可以看出,文中方法定位精度优于传统方法,且随着斜距的减小,定位精度逐渐变高,能满足弹体在末制导阶段对定位精度的要求.
图2 传统方法和文中方法的定位误差比较
4.2 匹配误差对定位精度的影响
景象匹配方法选取不当或图像形变均会造成匹配误差,影响弹体定位.假设图像距离向和方位向分辨率相同,且各存在5个分辨单元的匹配误差.采用弹体到场景中心点的斜距为 23 521 m 的这组特征点,在不考虑斜距误差的情况下,设定不同的分辨率,使用传统方法[4]和文中方法得到的定位误差如图2(b)所示.可以看出,在相同仿真参数的情况下,文中方法的定位精度优于传统方法的.即使当分辨率较低、匹配误差较大时,文中方法仍然能得到较好的定位结果.
4.3 定位方法收敛性分析
将收敛性定义为迭代次数和定位精度的收敛性,其中迭代次数收敛性以相同定位精度下不同算法需要的迭代次数来衡量,定位精度收敛性以相同迭代次数下不同算法的定位精度来衡量.选择了传统遗传算法、传统牛顿-遗传混合算法与文中方法进行比较.假设图像分辨率为 3 m,弹体到场景中心点的斜距为 23 521 m,5个特征点对应的斜距误差服从均值为 4 m、方差为 1 m 的高斯随机分布.实验中个人计算机的配置为Intel: 1.8 GB,8 GB 内存,Win7操作系统.下面验证其收敛性.
(1) 验证迭代次数的收敛性.根据4.1节中图2(a)的结果,在相同的仿真条件下,令定位精度达到 16 m 时终止迭代.表2给出了不同算法对应的迭代次数,可以看出,相比于其他两种传统方法,文中方法可以快速收敛.
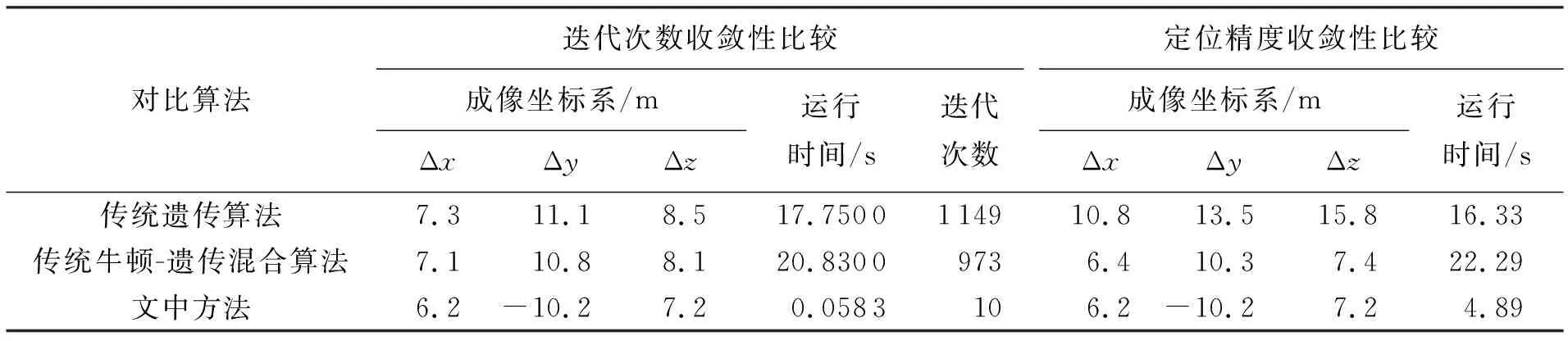
表2 定位方法收敛性分析
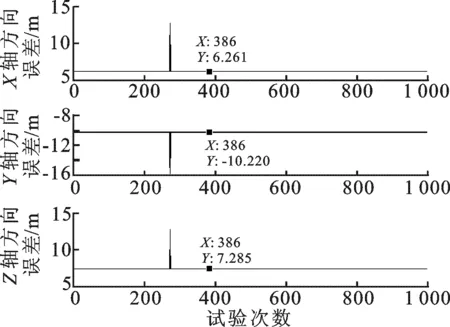
图3 运行1 000次的各方向结果
(2) 验证定位精度的收敛性.设置迭代次数为 1 000 次,表2还给出了不同算法对应的定位精度.可以看出,在有限次迭代后,相比于其他两种传统方法,文中方法可以快速地得到更高的定位精度.
仿真结果表明,传统遗传算法和传统牛顿-遗传混合算法的收敛性均较差;文中方法不论在迭代次数收敛性还是定位精度收敛性上都具有明显的优势,能够实时实现弹体精确定位.
4.4 定位方法鲁棒性分析
假设仿真参数与4.3节的仿真参数相同,重复试验 1 000 次,实验结果如图3所示.可以看出,在大量重复试验中,文中方法只出现1次不收敛的情况,其他试验均能达到较高的定位精度,证明笔者所提方法具有很好的鲁棒性.
5 结 束 语
针对弹体末制导俯冲阶段的定位问题,提出了一种基于高斯牛顿-遗传混合算法的弹体定位方法.首先构建了以场景中任意点为成像坐标系原点的弹体定位模型,在景象匹配的基础上,利用多特征点对应的斜距信息构建了非线性方程组; 然后针对常用方法收敛速度慢及鲁棒性差的问题,详细分析了文中方法在初值种群的选取、适应度函数的设计和变异操作方面的改进,通过混合算法迭代得到了弹体在成像坐标系中的准确位置,从而实现了实时修正惯导误差和弹体飞行轨迹;最后进行了仿真实验,验证了文中方法的有效性和实用性.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
兵器装备工程学报(2022年7期)2022-08-10
新技术新工艺(2022年3期)2022-04-02
爆炸与冲击(2022年2期)2022-03-17
电力勘测设计(2022年2期)2022-03-08
数学物理学报(2021年5期)2021-11-19
中国惯性技术学报(2019年5期)2020-01-07
测绘通报(2017年2期)2017-03-07
