
空间感知矩阵学习的极化SAR图像分类
2018-12-07 09:11成立业
西安电子科技大学学报 2018年6期
孙 宸,成立业
(工业和信息化部电子第五研究所 电子元器件可靠性物理及其应用技术国家级重点实验室,广东 广州 510610)
极化合成孔径雷达(Polarimetric Synthetic Aperture Radar, PolSAR)图像分类[1]是极化合成孔径雷达图像处理与解译的重要内容.极化合成孔径雷达图像的分类结果可以直接作为土地覆盖类型图使用,也可作为后续处理与解译的一个中间环节,在军事侦察、海面船只检测、农业应用、地质研究、植被种类判别等诸多领域有着广泛的应用.极化合成孔径雷达图像因为特殊的成像原理,存在大量的相干斑噪声,数据量多,标记样本少,为分类任务带来巨大的挑战.学者们提出的分类方法大致可以分为3类:基于目标分解的方法根据切合实际的物理约束解译目标的散射机制,尽管该类方法提供了基本的散射机理模型,但是提供的信息量是片面的;基于统计特性的方法[2]需要区分同质与异质区域,关于异质区域的描述需要估计大量的参数;基于机器学习的方法从数据中学习,处理问题灵活.其中支撑矢量机(Support Vector Machine, SVM)因为夯实的理论基础,在极化合成孔径雷达图像的分类问题中得到应用[3].最小二乘支撑矢量机(Least Square Support Vector Machine, LS-SVM)是支撑矢量机的最小二乘版本,具有全局最优性和良好的泛化能力[4],但是丢失了支撑矢量系数的稀疏性,在解决大规模数据的分类问题时,其测试时间特别长.
为了对极化合成孔径雷达图像进行高效分类,笔者提出了一种基于空间感知矩阵和最小二乘支撑矢量机的分类器.受压缩感知思想的启发[5],将最小二乘支撑矢量机中的适定问题转化成欠定的问题,减小优化问题的规模,增加解的多样性,从而可以寻找稀疏的支撑矢量系数,提高测试速度.首先设计了一个与数据耦合的判别式测量矩阵,对数据进行压缩测量时,保证了对分类相关信息的最大化保留,对分类不相关信息的压缩;然后,基于极化信息和空间信息,提出威沙特(Wishart)空间核来描述极化合成孔径雷达数据,减少相干斑噪声对分类结果的影响,并增强空间一致性;最后,构造了一个空间感知矩阵,提出了一种一步式剪枝的最小二乘支撑矢量机算法,获得了一种稀疏的极化合成孔径雷达图像的分类器,起到了快速分类的作用.
1 模型规划
1.1 算法概述
最小二乘支撑矢量机模型由Suykens提出,使用了等式约束和二次损失函数,而不再是支撑矢量机版本中的不等式约束和ε不敏感损失函数,进而将优化模型由凸二次规划问题变成了线性规划问题,对小规模样本的分类问题具有很高的精度.其对偶形式为
(1)

(2)

1.2 判别式测量矩阵
为了减小优化问题的规模,降低存储需求,增加支撑矢量系数的选择范围,笔者设计了测量矩阵.压缩感知常用随机测量矩阵进行观测,但在解决特定问题时,通用的测量矩阵性能往往不是最优的.在特定的问题中,笔者更关心如何快速得到准确的解,而非随机的测量矩阵比随机测量矩阵在感知稀疏信号方面更有效.因此,设计了一个与分类任务相关的非随机测量矩阵.该设计受线性判别分析(Linear Discriminative Analysis, LDA)启发,可以增加类间散布,减小类内散布.下面介绍线性判别分析,并由此推导出判别式测量矩阵.
1.2.1 线性判别分析

(3)

1.2.2 判别式测量矩阵
受线性判别分析思想的启发,笔者提出非随机的判别式测量矩阵.使用非线性映射函数φ:R→Z,将数据由原始空间R映射到高维特征空间Z,其中高维通常是无穷维.定义Φ= [φ(x1),φ(x2),…,φ(xn)],表示数据集从原始空间映射到高维特征空间.表示定理wφ=Φβ,其中β是wφ在基Φ下的表示系数,wφ是w在高维空间中的映射.由于最小二乘支撑矢量机的字典包括一个核矩阵,为了处理这种高度的非线性结构,对类间与类内散布矩阵分别向高维空间作映射,分别有
定义间隔MMargin为类间散布与类内散布相减.该间隔对应着原始空间中Sb-Sw在高维空间中的映射,使用相减的形式避免了奇异问题的发生,并对该间隔进行奇异值分解:
(8)
其中,U和V是奇异值分解中的酉矩阵,Λ是对角矩阵,对角线上的元素按奇异值从大到小进行排列.
假定测量数目为m,将判别式测量矩阵Ψ定义为酉矩阵U的前m列的转置,测量矩阵是一个扁矩阵,则
Ψ=[U(:,1:m)]T.
(9)
该非线性判别式测量矩阵具有明确的物理意义,是一个跟分类任务有关的测量矩阵.在对数据进行压缩测量时,测量矩阵还会起到减小数据类内距离、增大类间距离的作用,保证了对分类相关信息的最大化保留,对分类不相关信息的压缩.关于测量矩阵的有效性验证,将在实验部分给出解释.
1.3 威沙特空间核和威沙特空间字典
极化合成孔径雷达数据可以用相干矩阵的形式表示,该矩阵是一个3×3的复矩阵,即x=T,则
T
(10)
极化合成孔径雷达数据服从复威沙特分布,文献[6]在此分布的基础上,定义了一个对称的距离测度,用来表示任意两个样本间的关系:
d(Ti,TTj+TTi)-q,
(11)
利用空间信息可以显著地提高分类性能,加窗法是一种最常见的利用空间信息并且降低相干斑噪声影响的方法.利用加窗法构造威沙特空间核函数K,k(i,j)表示威沙特空间核的第i行第j列元素:
k(i,T,T∈Nh×h(Ti) ,
(12)
其中,g是核宽参数,i是以目标样本Ti为中心的矩形窗口内所有样本的加权平均,Nh×h(Ti)表示目标样本Ti的邻域集合,h×h是矩形窗的大小.当窗口大小为 1×1 时,表示没有利用空间信息.
2 实验与讨论
2.1 数据集描述
Flevoland数据集[7]是1989年8月中旬由美国航空航天局的喷气推进实验室的机载AIRSAR系统的L波段的传感器获取的.该地区被划分成15类,分别是干豆、油菜籽、裸地、土豆、甜菜、3类小麦、豌豆、苜蓿、大麦、草地、森林、水域、建筑,背景用白色标记,不包含在15类中.该数据是四视的,有精确标记的真实类标图,广泛用于极化合成孔径雷达图像的地物分类测试中,由 1 024× 750个像素构成.
2.2 判别式测量矩阵的有效性验证
(13)
实验结果如表1所示,加窗算法采用的窗口大小为9×9.从表1可以看出,笔者提出的测量矩阵比高斯随机矩阵和二值随机矩阵的均方误差更小,说明了提出的测量矩阵的有效性.

表1 3种测量矩阵关于均方误差的对比
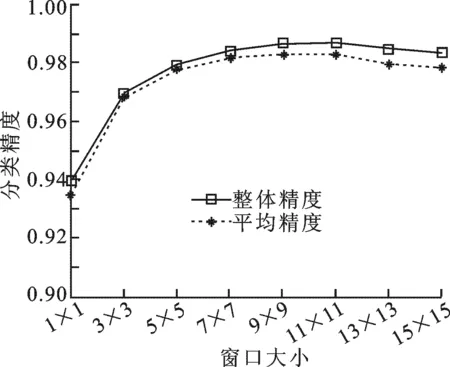
图1 窗口大小对分类器分类精度的影响
2.3 不同窗口下的实验结果对比
图1为窗口大小对分类器在Flevoland数据集中分类精度的影响.分类精度随着窗口的逐渐变大而提高.当窗口大小从 1×1 变到 3×3 时,分类精度的提升更明显,说明空间信息的利用可以显著地提高分类性能.但是随着窗口大小进一步增大,分类精度略微有所下降,这是因为在较大的窗口中包含了不同类的样本,影响了窗口中样本的同质性,对分类结果产生了负作用.因此,窗口大小的调节对分类性能有一定的影响,但在一定范围内较为稳定.在保证较高分类精度条件时,窗口越小越好,因为较小的窗口所需的计算量更小一些.
2.4 不同算法的对比
笔者提出的算法与不同的极化合成孔径雷达图像分类算法进行对比,这些算法是支撑矢量机、最小二乘支撑矢量机、威沙特最大似然[9].笔者提出的算法、支撑矢量机、最小二乘支撑矢量机的实验结果均给出两种:一种是无窗方法,即不利用空间信息;另一种是加窗方法,窗口大小调整到最优.对于支撑矢量机和最小二乘支撑矢量机的正则参数在{10-2, 10-1, …, 103}范围内调节,高斯核的带宽参数在{10-2, 10-1, …, 103}范围内调节,通过5倍交叉验证的方法确定.采用的特征向量是 [2A0,B0+B,B0-B,C,H,E,D,G,F]T,该特征广泛用在了极化合成孔径雷达图像的分类算法中.笔者提出算法的正则参数固定为1,窗口大小调整到最优.随机选取每类真实类标的5%作为训练样本,剩余的样本作为测试样本.采用的评价指标是整体精度(Overall Accuracy, OA)、平均精度(Average Accuracy, AA)、Kappa系数.

表2 Flevoland数据集中不同方法的分类精度和支撑矢量数目

图2 不同算法的分类结果对比
7种算法的数值结果如表2所示,视觉分类结果如图2所示.可以看出,提出算法的支撑矢量数目远远小于最小二乘支撑矢量机和支撑矢量机,而测试样本有 759 817 个.由于测试速度和支撑矢量的数目是线性关系,因此笔者提出的算法大大地提高了分类速度.文中加窗算法在13个类别(总共15类)中取得了最高的分类精度,其OA、AA、Kappa系数都是最高的;文中无窗算法在11个类别中取得了最高的分类精度,其OA、AA、Kappa系数在无窗算法中是最高的.图2(a)所示的支撑矢量机无窗算法不能很好地区分裸地、油菜籽,对裸地的分类精度只有 0.051 5,虽然对水域的分类精度达到了 0.938 9,但是黑色方框标出的水域部分出现了严重的错误.图2(b)所示的支撑矢量机加窗算法利用了空间信息,除了裸地外其余各类的分类精度较没有使用空间信息的支撑矢量机算法均有了提高,区域一致性变好,但是裸地类的分类精度依然很低,只有 0.050 7,黑色方框标出的水域和油菜籽类的分类效果依然不好.图2(c)所示的最小二乘支撑矢量机无窗算法对建筑类的分类精度只有 0.063 9,黑色方框标出的水域和油菜籽类也出现了较明显的错误.图2(d)所示的最小二乘支撑矢量机加窗算法较不加窗的最小二乘支撑矢量机算法分类效果提高明显,但是对于城区类的分类精度只有 0.1918 .图2(e)所示的威沙特最大似然算法对水域的分类精度只有 0.517 7.笔者提出的算法中的测量数目设置为 1 000,稀疏度设置为250,加窗算法在水域的分类精度达到了1.图2(g)为笔者提出的有窗算法,比图2(f)所示的无窗算法的性能提高了,展示了威沙特空间核中包含的空间信息对分类的帮助.
3 结 束 语
从剪枝角度入手,笔者提出一种一步式剪枝算法,将寻找最小二乘支撑矢量机的稀疏拓扑转化为对支撑矢量系数的零范数约束,并提出一种基于空间感知矩阵学习的分类器.设计的测量矩阵是一种与数据耦合的判别式矩阵,在减小优化问题规模的同时,能够增加类间散布,减小类内散布.该矩阵是为分类任务服务的,有着明确的物理意义.针对极化合成孔径雷达图像这类特殊的数据,利用数据服从威沙特分布和数据在空间邻域内的相似性,设计了威沙特空间核.对空间信息的利用降低了相干斑噪声对极化合成孔径雷达图像分类的影响,增强了区域一致性,提高了分类精度.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
北京航空航天大学学报(2021年9期)2021-11-02
中等数学(2020年7期)2020-11-26
航天电子对抗(2019年4期)2019-06-02
中学生数理化·中考版(2018年9期)2018-11-09
中学生数理化·中考版(2016年8期)2016-12-07
军事运筹与系统工程(2016年4期)2016-07-10
指挥控制与仿真(2015年4期)2015-04-23
