RFID技术在机器人定位系统中的应用研究
2018-12-18 13:24贾桂秋
中国设备工程 2018年23期
贾桂秋
(辽宁思凯科技股份有限公司,辽宁 丹东 118002)
传统移动式机器人的定位系统多由编码器与陀螺仪的所组成,在执行导航任务时必须知道起点与终点之间的距离,事先对工作地点进行检测,将环境信息建构于数据库中,才可由编码器推算出目前位置,不过地图的建置往往费时费力。此外,机器人在移动过程中,轮子与地面有时会发生打滑,使编码器产生测量上误差。室内机器人若以编码器计算移动的距离,在长时间航行后会有累积误差,且机器人移动时所需的地图信息,在建构上往往费时费力。本研究以RFID系统作为无线通信接口,而定位算法则以接收信号强度定位法进行定位,由于信号强度在检测时会受到室内环境的干扰而导致定位准确度不佳,因此加入灰色预测法降低干扰对控制器的影响。依托室内无线定位技术研制一套智能导航控制系统,使得机器人能迅速正确地航行至目的地。
1 理论基础
1.1 接收信号强度测距法
接收信号强度是以信号功率传播模型为基础,来估测发射端与接收端的距离,无线电的电磁波在自由空间中传播,其传播距离越远,能量密度越小。当接收器在不同位置,所检测的信号强度也会不同。
1.2 灰色预测法
灰色系统理论的特点在于只需很少的历史数据,即可对系统进行建模产生灰色模型,灰色预测是以灰色模型为基础所进行的一种预测方法,以少量的历史数据求得数据未来发展情形。
2 系统架构
2.1 移动式机器人
本研究轮式机器人硬件架构共分为控制、电力、检测、定位四大系统,系统元件如表1所示。
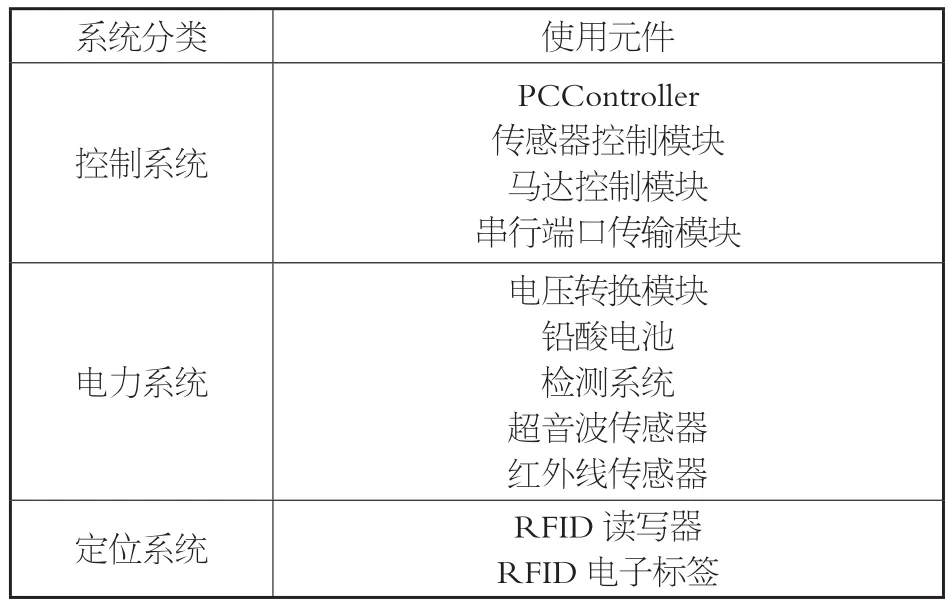
表1 机器人系统分类表
轮式机器人在定位上最大的问题在于使用光电编码器计算距离时会产生误差,此误差会不断累积无法消除,因此本研究以RFID系统代替光电编码器来解决累积误差的问题。
2.2 RFID系统
RFID是一种非接触式自动识别系统,主要由读写器、电子标签、天线三个元件组成。本研究所采用读写器频率为2.4GHz,电子标签为主动式电子标签,标签是以电池作为电源。与读写器之间是通过反向散射耦合的方式传输,该传输方式传输距离较长,工作原理如图1所示。
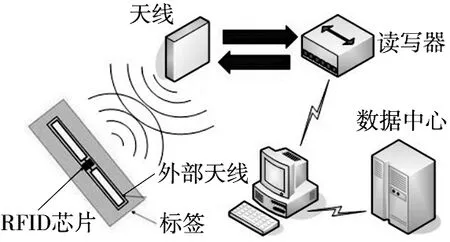
图1 RFID传输原理示意图
由读写器发出命令通过天线将信号发射出去,当电子标签接收到信号后,则会驱动内部IC进行逻辑运算与数据处理后再将数据回传给读写器。
图2为RFID设备信号强度与距离关系曲线,水平轴为距离;垂直轴为信号强度,图中圆点是在指定位置上所测得的信号强度,而实线则是将数据以二阶曲线拟合的结果。

图2 信号强度与距离关系曲线
2.3 灰色预测控制器
灰色预测控制器是以RFID系统为架构,包含RSS定位法以及灰色预测法的导航控制器。若信号强度为递增时,则进入灰色预测模式;若信号强度非递增时,按三角测距法估测信号发射点坐标,修正移动方向,直到到达目的地为止。机器人的移动示意图如图3所示。
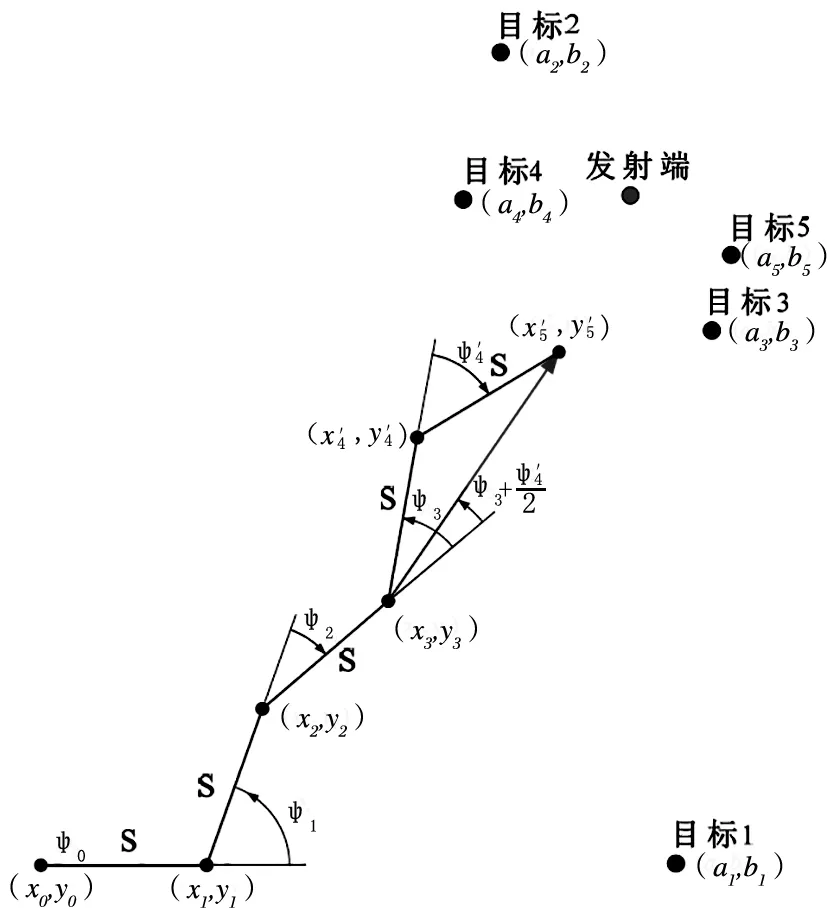
图3 机器人移动示意图
3 实验验证
导航程序采用VB6.0语言编写,实验中机器人由原点位置出发,目标点设在与机器人相距4m,与x轴夹60°角处,相当于平面坐标(200,346.5)的位置。如图4所示,机器人最终停止坐标为(232,300.5),与目的坐标的距离误差为56.03cm。
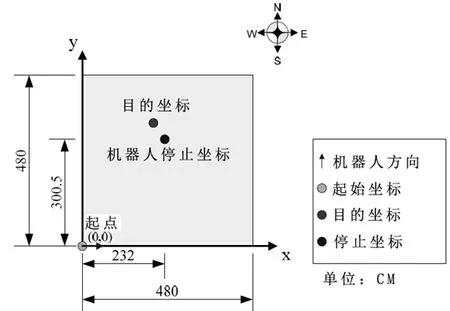
图4 机器人移动距离误差
由此看出,灰色导航定位系统可将机器人与目标点的距离误差控制在半径60厘米之内,能有效解决累积误差的问题。
4 结语
本研究解决机器人因使用光电编码器计算位置坐标时产生累积误差的问题,以RFID技术代替传统光电编码器,使用RSS定位法计算目标点坐标,为避免机器人移动时不必要的旋转,导入灰色预测法计算机器人的旋转角度,提出以灰色预测法结合RSS定位法的灰色导航定位系统。由实验可知,灰色导航定位系统可将机器人与目标点的距离误差控制在半径60cm之内,能够有效地解决累积误差的问题。本导航系统以RFID进行定位,只需将电子标签设置于目标处,机器人即可自行追踪进行导航,可应用于不同的工作地点,节省系统开发时间。
猜你喜欢
橡胶科技(2022年10期)2022-11-03
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
机械设计与制造(2022年5期)2022-05-19
中成药(2022年1期)2022-01-27
中国交通信息化(2017年8期)2017-06-06
科技资讯(2015年19期)2015-10-09
中国交通信息化(2015年11期)2015-06-06
创新科技(2014年16期)2014-07-27
中国交通信息化(2014年4期)2014-06-05
中国交通信息化(2014年8期)2014-06-05