
GYROX Ⅱ全站式陀螺仪定向测量技术研究
2018-12-25 09:55高常宝
中国矿山工程 2018年6期
高常宝
(金诚信矿业管理股份有限公司, 北京 100070)
1 前言
随着国家“一带一路”战略的推进,国内外基础设施投资不断加大,测量任务跨行业、跨区域已成为新常态,对测量工作提出了新要求。在矿山井巷、公路铁路隧道、城市地铁等地下工程施工中经常需要高精度的测量定向。几何定向和低精度的陀螺定向测量难以满足工程需要,随着卫星导航技术、光电一体技术、信息处理技术在测绘行业的应用,新仪器不断涌现,测量机器人发挥了测量精度高、操作简便、稳定性好的特点,例如自动全站式陀螺仪在工程定向测量中就充分体现了自动化的优势,在国内外得到了成功应用。金诚信矿业管理股份有限公司使用GYROX Ⅱ自动全站式陀螺仪在云南会泽矿、澜沧矿、湖北三鑫铜矿、铜绿山矿、江西银山矿、陕西潼金矿、赞比亚谦比希矿等国内外多个矿井建设中完成了陀螺定向测量工作,并积累了大量经验。在Zambia Chambishi Mining使用索佳GYROX Ⅱ自动全站式陀螺仪,采用跟踪逆转点法进行陀螺定向测量,井上、井下使用索佳CX-52全站仪按5″控制导线等级要求施测,确保了东南矿体两条千米竖井间、主矿体与西矿体间顺利贯通。
2 陀螺定向原理
2.1 陀螺的基本特性
(1)定轴性:陀螺是一个瞬间惯量很大的高速旋转马达,当转子角动量大且转子为自由悬挂时,其转轴方向
在空间保持不变,即陀螺轴在不受外力作用时,它的方向始终指向初始恒定方向[1]。
(2)进动性:当在转轴上施加扭矩时转轴将由于进动性而朝转矩矢量方向移动,即陀螺轴在受到外力作用时将产生非常重要的进动效应[2]。
2.2 GYRO X Ⅱ陀螺仪定向原理——钟摆式陀螺
(1)GYRO X II悬挂式陀螺仪机体内置悬挂带挂着陀螺马达(陀螺摆),架设到SX全站仪上组成全站式陀螺仪,陀螺摆绕地球子午线摆动(进动)。在悬挂带无扭矩的情况下,慢慢旋转全站仪进行跟踪进动的两个逆转点方向值,SX计算出进动的中心即真北方向。
(2)当地球重力给陀螺摆施加了扭矩所产生的向量朝北,旋转轴的N端(转子的向量)开始向北方向进动,此时重力引起的扭矩使进动继续并在北方向时进动速度达到最大。当N端越过北方向后重力矩又使新的N端(原S端)下降致使进动速度降低,当新的S端进动到这一端同样的象限角时又开始向北方向运动。地球不停地旋转和马达运行状态下旋转轴将在北方向左右往复运动[3]。
2.3 跟踪逆转点法
(1)进行真北测量时,不停地转动全站仪,使光标始终大致保持刻度0点上,当光标接近逆转点时,其移动会逐渐变缓,直到停止,然后光标将会向着相反的方向移动,这一过程会重复多次。全站仪利用多次测得的逆转点处的水平角度,计算出中值(真北方位角)。
(2)光标的移动可以看作是陀螺的进动。正弦波的顶点就是逆转点,这些逆转点可以通过光标的移动观测。
3 陀螺观测程序
3.1 测量程序
陀螺定向工作执行“3- 2- 3”的测量程序,即下井前在地面已知边上采用三测回测量陀螺方位角,在井下定向边上采用两测回测量陀螺方位角,上井后再用三测回测量陀螺方位角,其中下井前和上井后测量的陀螺方位角是用来求陀螺仪的常数的[4]。
3.2 一测回观测步骤
1)安置仪器
(1)测点上安置仪器时要严格整平对中,观测过程中水准气泡不得偏离0.5格,每次观测由一个测回转到下一个测回前仪器要重新整平和对中。
(2)SX、陀螺仪、逆变器和电池要正确连接。
(3)松开管式罗盘锁紧螺旋,将其安置在陀螺仪顶部,使罗盘体与SX望远镜处于同一方向线上,转动仪器使罗盘指针处于中央位置。
(4)打开检查开关检查游标在零分划线左右摆动是否对称。
2)测前零位观测
取下陀螺锁紧扣,将陀螺仪锁紧螺旋旋至自由悬挂位。
启动检查模式(仪器自动监测),测量结束后托起陀螺,使陀螺处于锁紧状态。
3)初测北方向
开启逆变器电源,下放陀螺使游标自由摆动。
通过SX自动跟踪逆转点确定初北方向。
观测结束,托起陀螺并锁紧。
4)精测北方向
将观测的北方向值赋值到SX上,再次下放陀螺使游标自由摆动。
用逆转点法精确跟踪5个逆转点,确定北方向。
观测结束,托起陀螺并锁紧。
5)观测基线陀螺方位角
(1)将观测的北方向值赋值到SX上,转动全站仪测量基线或定向边的陀螺方位角。
(2)二测回测量陀螺方位角,可以测前和测后分时段观测。
6)测后零位观测
关闭逆变器电源进行测后零位观测,方法同测前零位观测。
3.3 操作要点
(1)打开和关闭陀螺之前陀螺必须锁紧,防止悬挂带损坏。
(2)连接和拆除电源线时陀螺必须锁紧并将锁紧扣罩在锁紧螺旋上。
(3)精确测北时陀螺下放到阻尼位置时应停留10s,使游标移动平稳并限幅,再下放到自由位置。
(4)一测回结束关闭陀螺电源后应等待15min,再进行下一测回测量或拆除仪器。
4 限差及技术标准
4.1 基线点
(1)地面测定仪器常数选用地区最高等级已知边进行,基线已知坐标方位角中误差不超过10″[5]。
(2)井下定向边两端点应为永久点并成组设置,点间距不少于50m。
(3)地面控制点使用前应进行检查。
4.2 陀螺观测各项限差
GYROX Ⅱ自动全站式陀螺仪标称精度为±15″。参照测量规程规定,确定各项限差如下。
(1)逆转点个数:初测北2个,精测北5个。
(2)SX前后两测回的方向值互差的限差为10″。
(3)逆转点法观测摆动中值的相邻互差取20″,间隔互差取30″;中天法观测相邻时间差互差取0.4s,间隔时间差互差取0.6s。
(4)地面仪器常数互差取20″。
(5)井下定向边陀螺方位角测回间互差取30″。
(6)相邻逆转点的衰减值互差取60″;间隔逆转点衰减互差取75″。
(7)悬挂带零位变动误差应在±0.5格内。
5 测量成果计算
5.1 子午线收敛角
坐标方位角与地理方位角关系为A=α+γ。
1)根据高斯平面坐标解算
子午线收敛角根据安置仪器点的高斯平面坐标解算求得为
γ=k·y
(1)
式中:γ——安置仪器站子午线收敛角,符号由安置仪器点来确定;
y——仪器安置点横坐标值;
k——系数,以纵坐标X为引数(以km计)查表即可。
2)根据经纬度解算
γ=sinB·L
(2)
式中:B——安置仪器站纬度;
L——经度差。
5.2 仪器常数
1)摆动中值平均值
一测回摆动中值平均值计算公式为
(3)
式中:NT——摆动中值平均值;
N1、N2、N3——摆动中值;
a1、a2、a3、a4、a5——5个连续跟踪的逆转点读数,具体形式如图1所示。
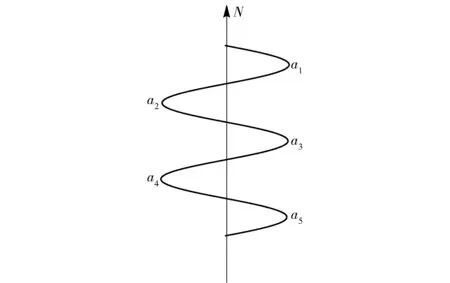
图1 连续逆转点
2)陀螺方位角
测线陀螺方位角计算公式为
αT=M-NT
(4)
式中:αT——测线一次测定陀螺方位角;
M——测线方向值平均值。
3)地面基线仪器常数
地面基线仪器常数计算公式为
Δ=A-αT=α+γ-αT
(5)
式中: Δ——仪器常数;
A——已知边的地理方位角,A=α+γ;
α——已知边的坐标方位角;
γ——已知边测站子午线收敛角;
αT——已知边的陀螺方位角。
5.3 定向边坐标方位角
定向边坐标方位角计算公式为
α′=A′-γ′=αT′-γ′+Δ
(6)
式中:A′——定向边的地理方位角,A′=α′T+Δ;
α′——定向边的坐标方位角;
γ′——定向边测站子午线收敛角;
α′T——定向边的陀螺方位角。
6 精度评定
6.1 定向边的坐标方位角中误差
(1)根据陀螺定向边坐标方位角计算公式,由误差传播定律得出定向边的坐标方位角中误差的计算公式为
(7)
式中:mα——定向边的坐标方位角中误差;
mΔ平——已知边测定仪器常数中误差;
mT平——定向边测定陀螺方位角中误差;
mγ——定向边测站子午线收敛角中误差。
(2)根据多个实测资料求定向的坐标方位角中误差。设同一台仪器(等精度)采用相同的测量方法进行了N次定向,各次定向的精度分别为mα1、mα2、…、mαN,则定向的坐标方位角中误差为
(8)
式中:mα平——定向边的坐标方位角中误差;
mαi——定向边的坐标方位角中误差;
N——定向边数。
设每次定向测量仪器常数测回数为nΔ1、nΔ2、…、nΔN,定向边测量陀螺方位角测回数分别为n1、n2、…、nN,则
(9)
式中:p——测仪器常数的权,pi=1/[nΔi*(nΔi-1)];
p′——测量定向边的权,p′i=1/[ni*(ni-1)];
v、v′——分别为井上下陀螺方位角均值与观测值之差。


6.2 已知边测定仪器常数中误差
(1)仪器常数一次测定中误差计算为
(10)
式中:mΔ——仪器常数一次测定中误差;
v——陀螺方位角均值与观测值之差,vi=[αT]/nΔ-αTi;
nΔ——已知边测量陀螺方位角测回数。

6.3 定向边测定陀螺方位角中误差
1)井下陀螺方位角一次测定误差
井下陀螺方位角一次测定误差计算公式为
(11)
式中:mT——井下陀螺方位角一次测定误差;
d——同一边两次定向方位角之差;
n——差值个数,即观测对数。
2)定向边测定陀螺方位角中误差
6.4 子午线收敛角误差
因子午线收敛角中误差mγ很小,可忽略不计。
7 赞比亚谦比希矿陀螺定向测量实例
7.1 谦比希矿井巷工程概况
Zambia Chambishi Mining位于赞比亚北部铜带省,南纬12°40′,东经28°7′,矿区海拔标高1 240~1 320m。矿体分为主矿体、西矿体和东南矿体,主矿体开拓方式为主斜坡道(长4 600m)和竖井(深1 020m),西矿体开拓方式为中央斜坡道(长3 800m)和174斜坡道(长3 600m),东南矿体开拓方式为副井(深1 260m)和北风井(深996m)。矿井设计主矿体与西矿体之间通过300~400m水平采区斜坡道贯通,距离6 200m,需要加测陀螺边提高导线测量精度;东南矿体两条竖井到底后在-980m水平进风道贯通,贯通距离4 800m,竖转平需要进行联系测量,以使井上下采用统一的平面坐标系统。
7.2 测量方案
图2所示为东南矿体间井与副井贯通陀螺导线图,图3所示为西矿体与主矿体贯通陀螺导线图。图2中K为根据工程计划和施工进度确定进度确定井下巷道贯通相遇点。井下定向边为东南矿体北风井980m水平A18—A17、副井980m水平F2—F3、主矿体400斜坡道400Z8—400Z9和西矿体300斜坡道300R7—300R5。地面基线为E09—E08-1,使用GYROX Ⅱ自动全站式陀螺仪,“3- 2- 3”观测程序,跟踪逆转点法测量陀螺方位角,求算定向边坐标方位角。
7.3 测量成果及精度评定
定向边坐标方位角计算及精度评定见表1。

图2 东南矿体北风井与副井贯通陀螺导线图

图3 西矿体与主矿体贯通陀螺导线图
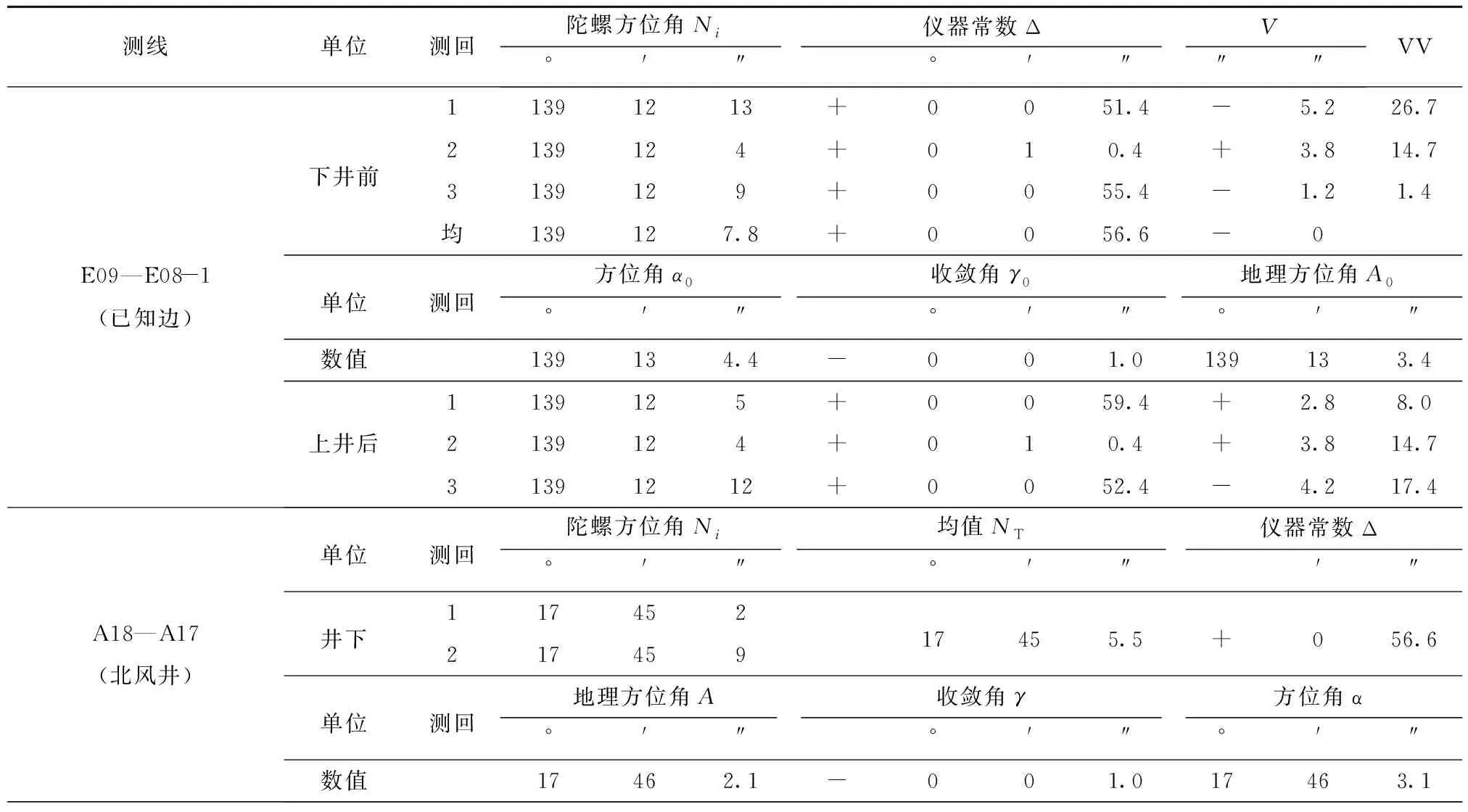
测线单位测回陀螺方位角Ni仪器常数ΔV°'″°'″″″VVE09—E08-1(已知边)11391213+0051.4-5.226.7下井前2139124+010.4+3.814.73139129+0055.4-1.21.4均139127.8+0056.6-0单位测回方位角α0收敛角γ0地理方位角A0°'″°'″°'″数值139134.4-001.0139133.41139125+0059.4+2.88.0上井后2139124+010.4+3.814.731391212+0052.4-4.217.4A18—A17(北风井)单位测回陀螺方位角Ni均值NT仪器常数Δ°'″°'″'″井下11745217455.5+056.6217459单位测回地理方位角A收敛角γ方位角α°'″°'″°'″数值17462.1-001.017463.1

续表1
8 结语
(1)国外使用全站式陀螺仪,测量技术要求应满足工程所在地的测绘法规的相关规定。
(2)国内外不同坐标系统计算子午线收敛角的方法有所不同,国内测站点横坐标值应去掉带号再减去500km。
(3)对等精度和不等精度定向测量成果应分别进行精度评定。
(4)陀螺仪的适用范围不宜超过纬度75°,工作温度-20~50℃,超出此范围测量精度下降很快。
(5)GYROX Ⅱ全站式陀螺仪精度较高(±15″,0.005gon/0.074mil),陀螺定向测量技术可推广至地下各种工程定向测量,也可从严规定各种限差满足各行业高精度定向要求。
猜你喜欢
结构工程师(2022年2期)2022-07-15
北京航空航天大学学报(2021年9期)2021-11-02
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
卷宗(2018年14期)2018-06-29
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
山东工业技术(2016年15期)2016-12-01
新高考·高一物理(2016年3期)2016-05-18
