
基于WiFi和WSN的室内外混合定位研究
2018-12-26 08:35吴东金夏林元李倩霞耿继军
地理空间信息 2018年12期
吴东金,夏林元,李倩霞,程 静,耿继军
(1. 中山大学 地理科学与规划学院,广东 广州 510275;2. 中山大学 广东省城市化与地理环境空间模拟重点实验室,广东 广州 510275)
随着全球导航卫星系统(GNSS)和泛在信号基础设施的完善和发展,基于泛在信号的定位为推动位置服务(LBS)和智慧城市的建设提供了强有力的支撑。传统的单一定位手段通常依赖GNSS和基于小区识别(Cell-ID)的蜂窝网络,在室内和卫星信号遮蔽区域,GNSS的可用性受到了极大的限制。而Cell-ID方法的低精度则难以满足位置服务越来越高的要求。近年来,由于接入点和热点的广泛分布,基于WiFi的定位技术[1]被看作是最具潜力的室内外定位技术之一。
基于单一的泛在信号,比如WiFi定位虽然能够满足特定场合下的需求,但对于室内外复杂环境下LBS和智慧城市中的无缝位置信息需求来说,仍然存在服务覆盖率不足或者定位精度不高等问题。近年来,越来越多的研究工作开始关注基于多种泛在信号[2-3]或者基于多种观测量[4-5]的混合定位。已有的研究工作在一定程度上改善了位置服务覆盖率[2]和定位精度[4]。不过,当前对于合理利用数学模型进行多种泛在信号混合定位的研究还很缺乏。
本文针对室内及卫星信号遮蔽区域的定位问题,提出了基于粒子滤波的混合定位方法。根据WiFi和WSN(wireless sensor network, 2.4GHz Zigbee)信号的特点,在传统序贯重要性重采样(Sequential Importance Resampling, SIR)方法[6]的基础上提出多源泛在信号辅助的改进方法。所提出的方法综合利用WiFi和WSN信号的信号强度(RSSI)随机特性优化粒子结构,提高粒子重采样的准确性,进而有效地提高粒子滤波的位置跟踪性能。实验结果表明,与基于单一信号定位方法相比,我们所提出的混合定位方法取得了更高的定位精度。
1 基于泛在信号的定位
1.1 基于泛在信号的基本定位方法
基于泛在信号的基本定位方法大致可以分为3类:接近度(proximity)、交会(intersection)和场景分析(scene analysis)[7]。其中基于接近度的定位方法通过探测目标是否靠近某已知位置来确定目标的位置。比如,Cell-ID方法将移动设备当前连接蜂窝小区的坐标作为该设备的位置。这种方法虽然能够简便快速地确定移动终端的位置,但是定位精度比较低。
交会方法的位置解算原理与卫星伪距绝对定位原理相同,即基于移动端到4个以上基站的距离利用最小二乘法或者极大似然估计进行位置估算。根据观测量的不同,交会方法可以分为基于信号强度(RSSI)、到达时间(TOA)和到达角度(AOA)等方法。这些观测量的测量精度直接影响定位精度,而它们或者测量精度不高(比如RSSI),或者定位设备复杂(比如TOA和AOA)。
对于场景分析方法,在定位中的一种应用实例是位置指纹匹配(location fingerprinting)方法。位置指纹匹配是基于RSSI的定位系统通常采用的技术,一般由线下阶段和线上阶段组成。在线下阶段,需要建立覆盖目标区域的位置指纹库,位置指纹库由目标区域各个位置扫描到的信号强度向量构成。在线上阶段,利用目标物实时采集的信号强度向量与位置指纹库进行匹配,选取最相似的一个或多个位置指纹点估计目标的位置。匹配方法通常可以分为确定性[8]和或然性[9]方法。确定性方法估计目标位置时仅考虑纯粹的信号强度值,而或然性方法解算目标位置时考虑的是信号强度概率分布。位置指纹匹配方法虽然定位精度较高,但是需要建立和不断更新位置指纹数据库。
这些基本定位方法存在着各种不足,学者在从基本原理解决问题的同时,也需要注重不同方法之间的互补性,研究混合定位方法。
1.2 基于泛在信号的混合定位方法
基于单一技术的定位方法比较适合特定场合下的应用,但不能满足无缝位置服务的要求,而融合了不同信号或技术的混合定位是可以选择的解决方案之一。比如,PlaceLab[2]混合GPS、WiFi、GSM和蓝牙等信号进行定位。由于混合了多种信号,系统的位置服务覆盖率能达到100%,精度一般在20~30 m之间。Kritzler等[3]提出在工业环境中利用UWB、RFID、键击传感器(keystroke)和WiFi等技术进行混合定位。他们采取的混合定位方法仅仅是将不同技术的定位结果进行简单平均。McGuire等[4]从不同角度对CDMA蜂窝网络信号的RSSI和TDOA观测量进行混合定位研究。其中,从估算层面提出根据误差协方差对两种观测量单独解算的结果进行线性加权平均的混合定位方法,以及从观测层面提出综合利用两种观测量进行混合解算的定位方法。实验结果表明,观测层面的混合定位方法定位精度更高,但计算负担也相对较大。WHERE项目[5]开展了射频信号的不同观测量在不同组合方式下的混合定位研究,比如,TOA和RSSI混合定位;TOA、AOA、AOD(angle of departure)和多普勒频移混合定位;基于EKF(扩展卡尔曼滤波)和RBPF(Rao-blackwellized particle filter)的动态位置跟踪等,如图1所示。
综合以上研究现状,当前缺乏对基于多种泛在信号进行混合定位的研究,特别是对于混合定位数学模型的研究。
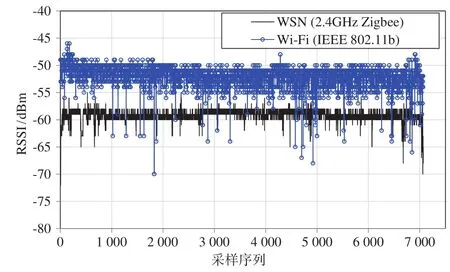
图1 WiFi和WSN (2.4GHz Zigbee)的RSSI采样序列
2 基于WiFi与WSN室内混合定位
2.1 WiFi与WSN(2.4GHz Zigbee)信号特性
因为WiFi和基于IEEE 802.15.4的Zigbee工作频段都处于2.4 GHz左右,是全世界公共的工作频段,很容易受到同频段信号,如蓝牙、无线USB的干扰。WiFi单个信道带宽较宽(IEEE 802.11b信道带宽为22 MHz[10]),而2.4 GHz Zigbee单个信道带宽只有2 MHz[10],因此WiFi受到干扰的几率大得多,其信号传输质量也趋于不稳定。针对WiFi和WSN信号传输过程中的信号衰减情况开展相关实验,结果证明2.4 GHz Zigbee信号质量更加稳定。图1展示的是两种信号在环境相同情况下的RSSI序列,采样频率为1Hz,从图中可以看出2.4 GHz Zigbee的RSSI数值波动幅度平均约为1 dBm,而WiFi(IEEE 802.11b)的RSSI数值波动幅度平均约为3 dBm,实验结果验证了推理。因此,本文选择WSN作为增强信号辅助粒子重采样。
2.2 混合定位模型
2.2.1 状态模型
假设有状态序列{Xk,k∈N},考虑到本方法适用场景下的目标移动速度通常较小,采用了静态状态模型,其表达式为:

式中,ωk表示模型噪声。
由于观测噪声,移动目标的位置通常不能直接测量,而且估算误差通常也不具备高斯变化特征。利用非线性表达式描述观测量和状态之间的关系:

式中,hk代表非线性函数;μk表示观测噪声。
因为粒子滤波模型能够表达任意概率密度分布,包括非线性和非高斯分布,并能够收敛于真实后验分布[6,11-12],所以选择粒子滤波模型进行位置估算。
2.2.2 SIR粒子滤波模型
粒子滤波是一种采用粒子群表达概率密度的序贯蒙特卡罗方法,它可以用在状态空间模型中[11]。假设有一粒子集{,i=1, …,N}(N表示粒子的数量),ss以及相应的正则化权重。以X0:k= {Xj,j= 0, …,k} 表示到k时刻所有状态,那么k时刻其后验概率密度可以近似地表示为:

式中,δ(·)是狄拉克函数,利用重要性采样原则[11]选取权重Xki。假设重要性函数为q(X0:k|Z1:k),并且重要性分布只与前一个时刻状态和当前时刻观测有关,那
么权重的递推公式[12]可以表示为:


由于在每一步粒子更新过程中都进行了重采样,并且粒子权重都重置为,所以粒子权重可进一步简化为:

SIR方法要求每一次迭代都进行重采样的策略有效解决了粒子退化问题。
最终可以不断地利用粒子群及相应权重估算:

2.2.3 辅助重采样方法
由于观测值易受环境,如空气温度、空气湿度、人员走动等的影响,在粒子重采样过程中会出现严重偏离状态的真实概率密度的问题。本文在SIR方法的基础上提出了一种改进方法,即利用抗干扰性更好的WSN信号确定以信号源为中心,R(由RSSI测距所得)为半么的高概率粒子分布区,通过欧氏距离选取处于分布区内的粒子位置分布ψk:

式中,Nk为分布区内粒子数目,取ψk的几何中心作为重采样的粒子初始位置:最后形成新的粒子集{,i= 1, …,Ns}。

在计算粒子权重时利用k时刻观测向量Zk与位置指纹库中观测值向量之间欧氏距离的倒数近似地估计p(Zk|),即

式中,N为观测向量的维度;RSSIj为观测向量信号强度值,而RSS是位置指纹信号强度值。
3 实验设计与结果分析
3.1 实验设计
为了验证本文提出的混合定位方法,在中山大学校园内一栋科研大楼旁边的草地上(如图2所示)进行了多项实验。这是一块边长为20 m的正方形区域,将其划分为2 m×2 m的格网进行线下位置指纹库的采集。在这块场地中总共可以探测到7个WiFi接入点(AP)和4个WSN参考节点(RP),其中4个WSN RP安置在场地的四个角落,而两个WiFi AP安置在场地一对顶角处,坐标为(0, 0) 和(20, 20),其余的WiFi AP可能分布在旁边的建筑物内。实验利用一台笔记本和一个WSN定位节点作为移动终端。实验中的参数设置如下:粒子滤波状态模型噪声遵循N(0,22),粒子数为1 000,增强信号搜索半么R为1.5 m。

图2 实验场地现场布局
3.2 实验结果与分析
先针对不同的定位算法开展了对比实验,其中传统SIR粒子滤波和K加权最近邻(K weighted nearest neighbors,KWNN)算法作为比较对象。图3展示了不同算法的定位误差累积分布对比结果。从图中可以看到,改进的SIR粒子滤波(M-SIR PF)的定位精度高于其他两种算法。表1展示了3种算法定位误差的详细对比结果。其中,与传统SIR粒子滤波算法(SIR PF)相比,改进的SIR粒子滤波的平均定位误差下降了10%;与KWNN(K=4)算法相比,其平均定位误差下降了30.8%。所示,路么一部分处于增强信号辅助区域(由空心三角形标出)。从图中可以看出,在增强信号的辅助下,改进的SIR粒子滤波算法的跟踪效果明显好于传统SIR粒子滤波算法。因此,充分合理地利用泛在信号进行混合定位,对于降低定位误差、提高定位精度具有积极的意义。
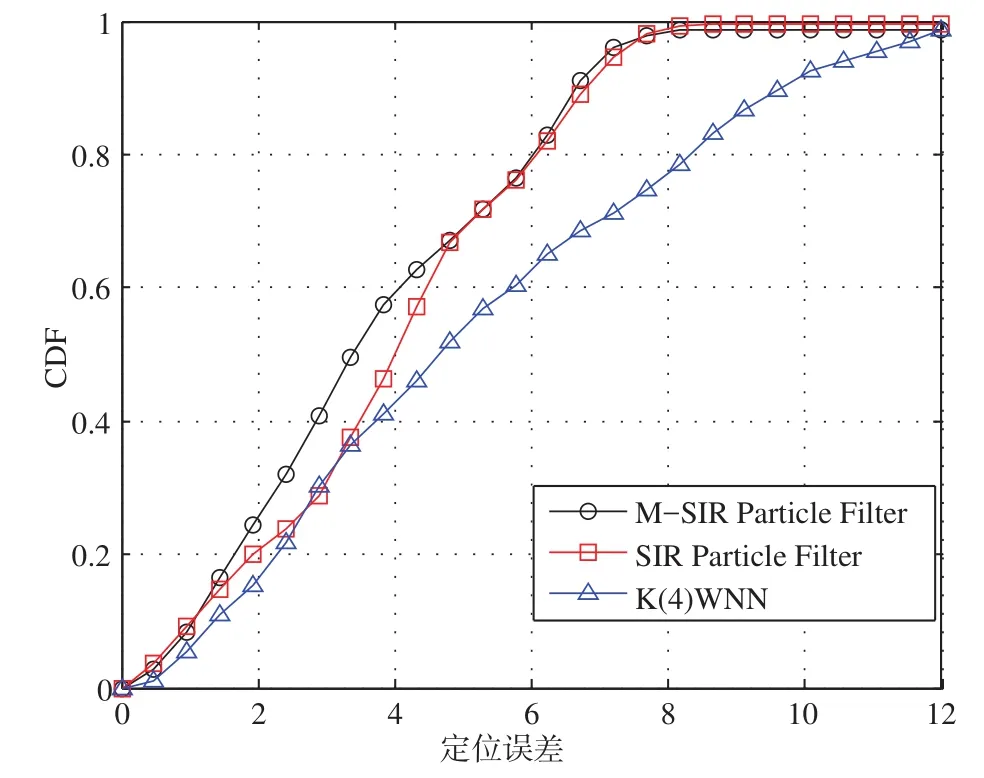
图3 不同算法的定位误差累积分布图

表1 定位误差的对比结果
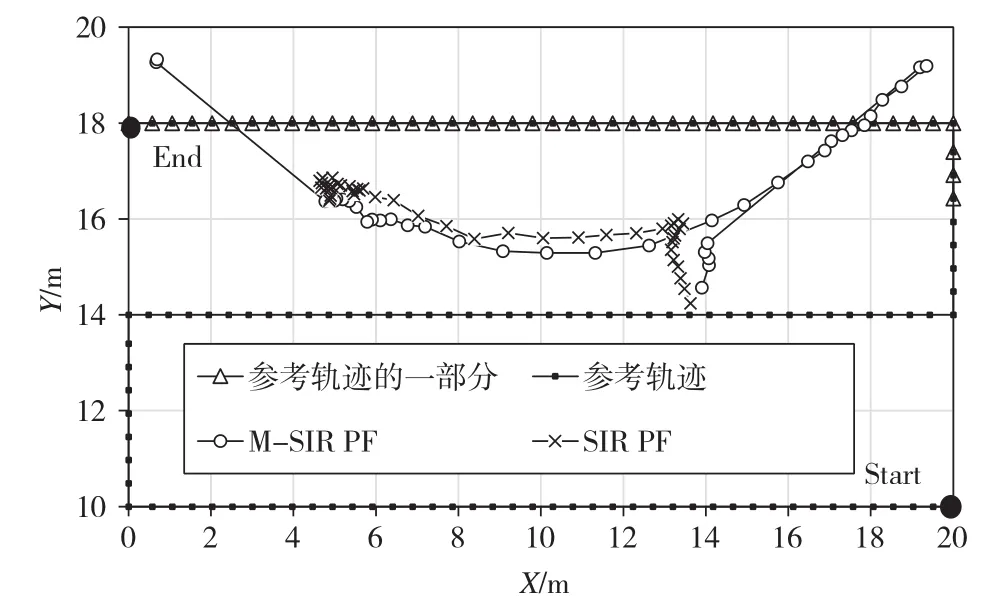
图4 改进的SIR粒子滤波和传统SIR粒子滤波的跟踪效果对比
改进SIR方法的关键在于在滤波过程中加入了泛在信号辅助的粒子采样步骤。本文根据泛在信号产生作用的不同距离,即以泛在信号源为中心的不同搜索半么开展了多次实验,图5展示了系统的定位结果。从图中可以看出,搜索半么太小或太大,定位误差都较大,而在1.5 m处取得了最好的定位结果。其中的原因在于,搜索半么太小导致泛在信号辅助的粒子采样方法无法发挥作用,而搜索半么太大又导致粒子采样过程被过度校正。

图5 增强信号不同搜寻半径对应的平均定位误差和标准差(以误差线表示)
4 结 语
针对室内及卫星信号遮蔽区域的位置服务需求,以及GNSS和单一泛在信号定位在这些区域所遭受的困境,提出了基于多种泛在信号,如WiFi和WSN的混合定位方案。此方法根据WiFi和WSN两种信号RSSI的随机特性,利用粒子滤波模型混合这两种信号,提出利用增强信号辅助粒子重采样的方法,通过提高滤波过程中粒子重采样的准确性来提升模型的位置跟踪性能。实验结果表明,我们所提出的基于泛在信号的混合定位方法取得了良好的定位结果,并且定位精度优于基于单一信号的定位方法。
猜你喜欢
军事文摘(2023年4期)2023-04-05
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
小哥白尼(趣味科学)(2021年11期)2021-02-28
小天使·一年级语数英综合(2020年10期)2020-12-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
