
汽车倒车防撞报警器的设计
2018-12-28 11:54隋美丽龙建杨立平张莹
汽车实用技术 2018年23期
隋美丽,龙建,杨立平,张莹
(北京电子科技职业学院汽车工程学院,北京 100176)
前言
通过以SPCE061A芯片为核心的汽车倒车防撞报警器系统设计与实现,硬件设计主要包括超声波测距原理及其模组电路、61单片机其编程环境。
1 硬件系统设计
汽车倒车防撞报警器系统使用61单片机,用于控制和处理超声波模组发射和接受的信号,外接LED显示模块。
2 超声波测距模组
超声波测距模组采用的是脉冲测量法。为了保证测量的可靠,检测回波信号时,采用SPCE061A的外部中断对回波的上升沿进行检测,而且利用定时器B进行计时。
2.1 超声波测距模组电路
超声波测距模组电路主要由超声波谐振频率调理电路、超声波回波接收处理电路、电源接口电路、测距模式选择跳线电路、模组接口电路五部分组成。超声波测距模组可用于测量两个不同量程的障碍物距离(精度为 0.01米):短测量距离为0.2-1米;长测量距离为0.7-4米。
2.1.1 超声波谐振频率调理电路
超声波谐振频率调理电路如图 1所示。单片机产生40KHz的方波,并通过模组接口(J4)送到模组的CD4049,-CD4049则对40KHz频率信号进行调理,以使超声波传感器产生谐振[1][2][3]。

图1 超声波谐振频率调理电路
2.1.2 超声波回波接收处理电路
超声波回波接收处理电路如图2所示。超声波接收处理部分电路前级采用NE5532构成10000倍放大器,对接收信号进行放大;后级采用LM311比较器对接收信号进行调整,比较电压为LM311的3管脚的输入,可由J1跳线选择不同的比较电压以选择不同的测距模式。
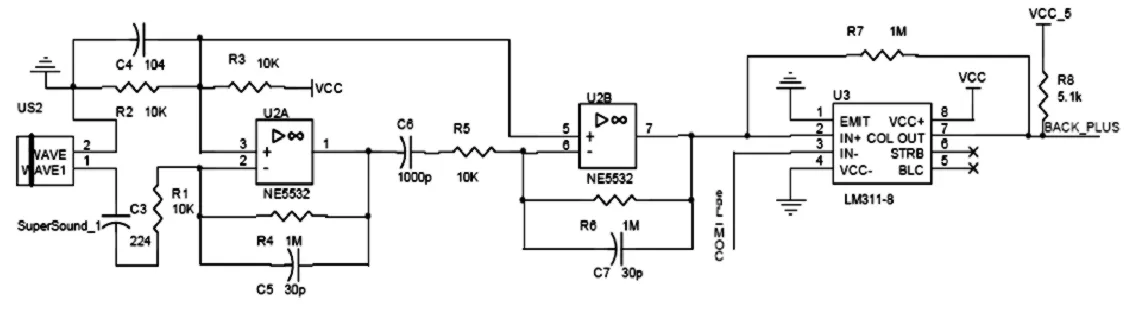
图2 超声波回波接收处理电路
2.1.3 电源接口电路
电源接口电路如图3所示。J3为外部电源接口,最高电压不要超过12V,J2为电源选择跳线,VCC_5即为由61单片机通过10PIN排线引入模组的电源;VCC即为模组的放大器、调理电路的供电电源。当用户使用61单片机为其供电时,要把VCC与VCC_5V短接;而使用外部电源时,要把VCC与VCC_IN短接。

图3 电源接口电路
2.1.4 测距模式选择跳线电路
测距模式选择跳线电路。模组提供了测距模式选择跳线J1,可以选择短距测量模式、长距测量模式。跳线选择LOW时为短距测量模式,选择HIG时为长距测量模式[4]。
2.1.5 模组接口电路
模组接口电路用户只需要把模组电源输入跳线J2、测量模式选择跳线J1设置好后,用排线把J5与61单片机的IOB口低八位相接,J4与IOB口高八位相接即可使用了。
3 单片机系统
3.1 61单片机系统简介
61单片机由最小系统、电源模块、放音模块、下载模块、复位模块和端口模块组成。最小系统包括SPCE061A芯片及其外围基本模块。SPCE061A芯片是整块61板的大脑,所有控制信息都是从这里发出的,外围基本模块则协助SPCE061A芯片控制单片机正常工作;电源模块为4.5V,电源模块为整个系统提供电源;放音模块里麦克风用来进行语音输入的,还有一个喇叭接口用来进行语音播放;下载模块:程序通过下载模块接口下载到61单片机;同时在线调试时能上传一些硬件信息到开发环境中;使用键控模块可以编写内含键盘判断的程序;当按下复位模块按键后,单片机就重新开始工作;端口模块对外挂硬件的控制或者获取外部硬件的一些状态便于单片机来进行处理[5]。
61单片机最小系统电路包括SPCE061A芯片及其外围基本模块,外围基本模块有:晶振输入模块(OSC)、锁相环外围电路(PLL)、复位电路(RESET)、指示灯(LED)等[6][7]。
电源模块电路如图4所示。61单片机的内核供电为3.3V,而I/O端口可接3.3V也可以接5V,所以在电源模块(61板上)中有一个端口电平选择跳线,如图中的J5,但是为了本系统可以可靠的工作,需要给61板外接5V的电源,并将61板的端口电平选择为5V,即J5用跳线帽将V5和VDDH短接。

图4 电源模块电路
放音模块电路如图5所示。放音模块利用的是SPCE061A内部的DAC,其中SPY0030仅需2.4V 即可工作,其输出功率约为700mW。

图5 放音模块电路
3.2 61单片机编程环境和语言特点
61单片机的开发环境叫做集成开发环境(也称 IDE),它集程序的编辑、编译、链接、调试和仿真等功能为一体。IDE具有友好的交互界面、下拉菜单、快捷键和快速访问命令列表等,使程序设计工作更加方便、高效。
4 防撞报警器测试
主要对超声波测距模组与61单片机的连接与调试、LED显示模块与 61单片机的连接与调试和汽车倒车防撞报警器的连接与调试。
超声波测距模组与 61单片机的连接包括超声波测距模组、61单片机、喇叭和电池盒四个部分。
在连接超声波测距模组和 61单片机时需把模组的电源输入跳线设为61单片机输入,再把61单片机电源输入跳线设为5V端、下载线选择跳线设为“1、2”、音频跳线选为DAC端,然后用排线把J5与61单片机的IOB口低八位(J6)相接,J4与61单片机的IOB口高八位(J7)相接。
LED显示模块使用两个LED数码管显示测量结果。显示精度为1厘米。当所测距离小于100厘米时显示后两位数字;大于等于100厘米时,显示前两位数字。
将超声波测距模组和LED数码显示模块与61板相连,即组成汽车倒车防撞报警器,可用于分别测量地面与墙面两种障碍物,测试结果结果表明,实际障碍物距离相同而障碍物不同,所测得的结果不同,误差大小由障碍物反射率决定的,反射率越好,误差越小;实际障碍物距离不同而障碍物相同,所测得的结果也不同,所测距离越大误差越大。
5 结论
本文详细介绍了汽车倒车防撞报警器的硬件系统设计、连接与调试过程。文中所设计的汽车倒车防撞报警器使用超声波传感器收发超声波信号;使用61单片机产生40KHz脉冲波形并对回波信号进行处理,具有如下功能:
1)可以探测到两个不同量程范围内的障碍物:短探测距离为0.2-1米;长探测距离为0.7-4米。
2)具有语音报警功能,可以语音播报所测得的障碍物距离。
3)具有LED显示功能,可以辅助显示所测得的障碍物距离(当所测距离小于100厘米时显示后两位数字;当所测距离大于等于100厘米时,显示前两位数字)。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
学苑创造·C版(2022年4期)2022-06-18
汽车实用技术(2021年9期)2021-05-26
软件(2020年3期)2020-04-20
装备维修技术(2020年19期)2020-03-08
科学与财富(2019年3期)2019-02-28
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
汽车工程师(2018年1期)2018-07-13
