电导增量法在光伏系统MPPT中的分析与改进策略
2019-01-22 08:24关晓晴何安然
安徽理工大学学报(自然科学版) 2018年6期
关晓晴,何安然
(1.神华国华能源投资有限公司规划发展部,北京 100007;2.南瑞集团国电南瑞科技股份有限公司南瑞研究院,江苏 南京 210003)
目前,生态环境的破坏以及资源的短缺已经成为日益严重的全球性发展问题。因此,尽快开发利用足以支撑人类社会的可持续发展的可再生能源成为亟待解决的问题[1]。在众多可再生能源中,太阳能光伏发电具有使用寿命长、维护简单、安全可靠无污染等优点,受到全世界各国的普遍关注,发展前景广阔[2]。由于影响光伏电池输出功率的因素较多且大都不可控,导致光伏发电具有一定的随机性,光伏电池的输出也在发生着变化。另外,光伏发电系统的成本普遍相对较高,因此需要充分利用光伏发电最大发电效率,以便更好地取得经济效益。所以最大功率点跟踪技术(Maximum Power Point Tracking,MPPT)就成为光伏发电控制系统中必要的控制策略[3]。
目前MPPT技术控制方法很多,如传统的短路电流法、恒定开路电压法、扰动观察法、电导增量法,还有近些年的非线性控制策略如模糊逻辑控制、神经网络法等。虽然各具特色,但在实时跟踪的快速性和稳态跟踪精度等方面仍显不足,具体表现为短路电流法、恒定开路电压法都是在静态情况下获得最大功率点,当外部日照、温度等因素变化时,无法动态追踪最大功率点,从而导致新能源利用率低下[4];扰断观察法虽能动态跟踪最大功率点,但当外部环境较为稳定时,需要不断扰动最大功率点,从而导致部分时间工作于非最大功率点,造成能量损失[5];电导增量法虽能快速跟踪最大功率点,但是当外部环境变化较为剧烈时,存在无法跟踪的问题[6];而近些年一些智能算法相对复杂、实现困难,无法在实际工程中普及应用。因此必须结合各方面因素考虑选择合适的方法。
在各种算法中,常用的扰动观察法(Perturbation and Observation,P&O)和电导增量法(Incremental Conductance,INC)因效率相对较高且系统简单容易实现而得到广泛应用[7]。但是,这两种控制策略在光强突变等情况下也存在误判的问题。为了解决这个问题,学者们先后设计出了很多智能控制方法,但大多较为复杂不易实现。本文提出基于观测最大功率点的改进型变步长电导增量法,通过观测算法识别当前距离最大功率点的程度,改变跟踪步长,快速识别最大功率点,解决了外部环境突变情况下的电导增量法无法快速、准确跟踪最大功率点的问题,对提升光伏新能源的最大效能利用,有极大的促进作用。
1 光伏电池数学模型
1.1 光伏电池工程模型
典型的光伏电池的结构是一个类似于二极管的由半导体材料制成的PN结。光伏电池的基本原理为光生伏特效应,即太阳光打在光伏电池板表面时,在一定条件下,光能会被半导体所吸收,产生电子-空穴对,在内建电场的作用下,电子和空穴分别拉向不同测,PN结两段由此产生电动势,从而将太阳能转化为电能[8]389。根据这一原理,光伏电池的等效电路模型如图1所示。

图1 光伏电池的等效模型
由图1计算可得,PV电池的输出输出关系式为
(1)
式中:I为光伏电池的输出电流,Iph为光生电流,Ic为二极管反向时的饱和电流,Rs为等效串联电阻,Rsh为等效旁漏电阻,A为二极管品质因子(一般介于1~2之间),K为玻尔兹曼常量(1.38×1023J/K),T为光伏电池温度(为t+273K),q为电子电荷常量(1.6×10-19C)[8]390。
1.2 光伏电池的输出特性
对光伏电池建立仿真模型,得到光伏电池的输出P-U、I-U特性曲线如图2所示。在温度和光照都一定的情况下,光伏电池输出的P-V曲线是一个近似抛物线的单峰值曲线,并且存在唯一的最大功率点[9]。MPPT控制的原理就是,先对太阳能电池的工作电压和工作电流同时采样,经过乘法运算得到功率数值,然后通过一系列寻优过程,最终使其工作于最大功率点附近[10]。
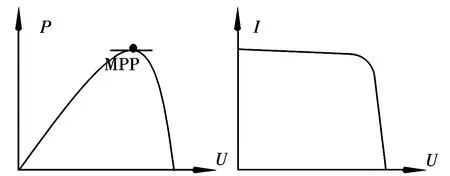
图2 光伏电池输出等效P-U和I-U特性曲线
2 系统原理图
光伏并网系统中,一般包括单级式并网逆变器和双级式并网逆变器,其中单级式并网逆变器其一级结构中同时实现最大功率跟踪和并网逆变功能,一般多见于集中式大型并网逆变器,功率等级一般在百千瓦级以上;双级式并网逆变器包括DC/DC整流和DC/AC逆变两部分,其中DC/DC负责最大功率跟踪,DC/AC负责并网逆变功能,在实际工程应用中的,组串式逆变器即为此结构,功率等级一般为十几-几十千瓦等级[11]。
根据输入输出之间连接的开关器件、二极管等位置的不同和输出目的不同,DC/DC电路有降压斩波电路(Buck电路)、升压斩波电路(Boost电路)、升降压斩波电路(Buck-Boost电路)和库克电路(Cuk电路)等,根据系统结构和目的不同选择不同的变换电路[12]。在组串式并网逆变器中,一般一个DC/AC并网逆变器单元前置4~8(甚至更多)个DC/DC变换器用于最大功率跟踪[13]。Boost电路具有升压和电流连续的优点,所以在组串式并网逆变器中,一般选择BOOST升压电路实现最大功率跟踪。
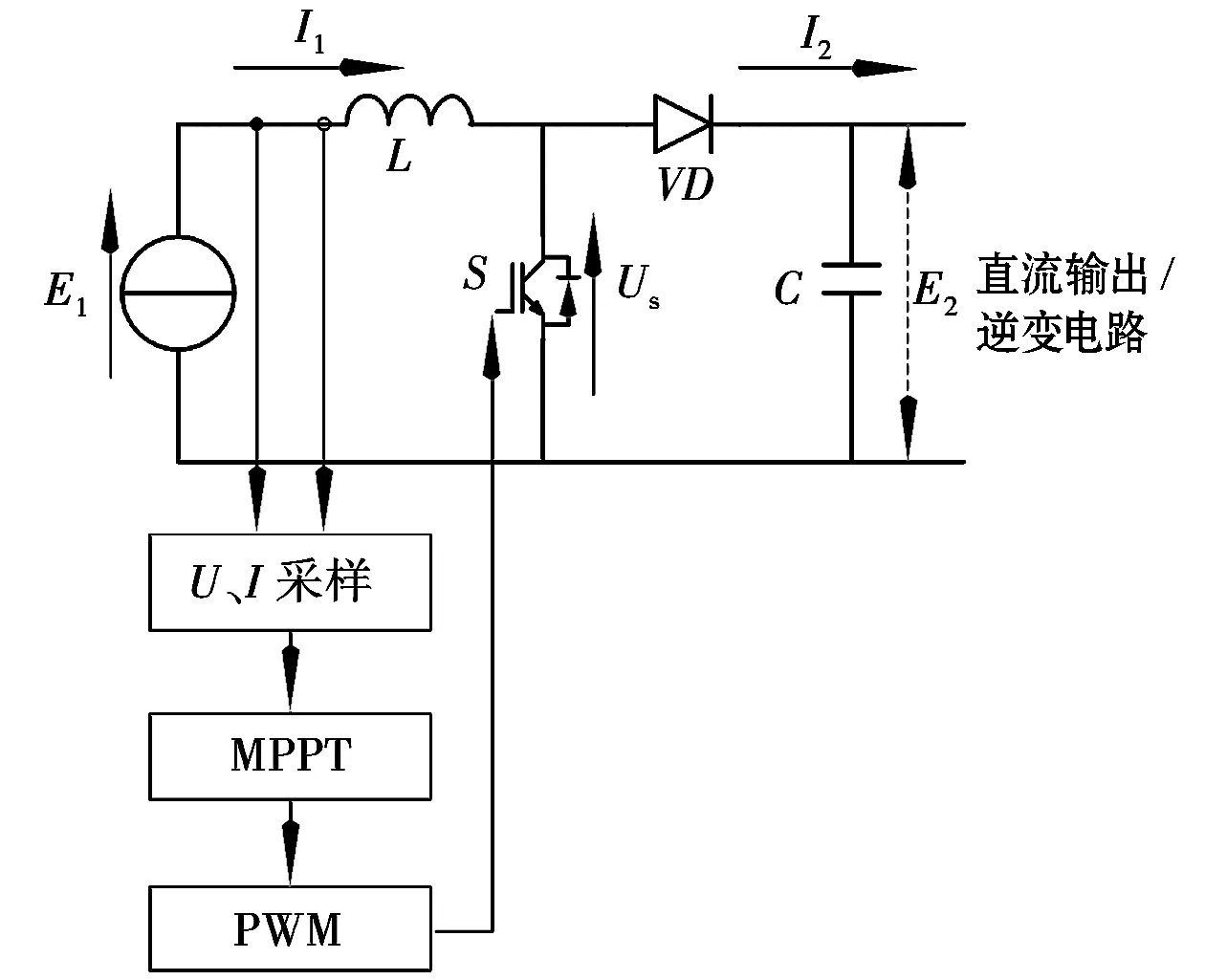
图3 基于Boost电路的MPPT系统框图
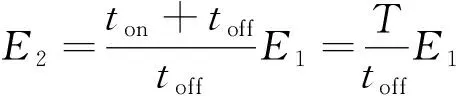
如图3所示,当功率管收到触发信号导通时,电感L上积蓄能量;触发信号中止功率管S关断时,电感积蓄的能量与电源的能量同时提供给负载/后级逆变。假设L充分大,流经L的电流为恒定值I1;二极管导通时,假设导通时间为ton,则L中积蓄的能量为E1I1ton。然后关断功率管,假设C充分大,输出电压为恒定值,S关断时间为toff,则释放到负载/后级逆变的能量为(E2-E1)I1toff。稳态时两者相等,所以有
E1I1ton=(E2-E1)I1toff
(2)
从而得到
(3)
定义功率管占空比D=ton/T,结合式(3)可以得到,系统的输入输出电压关系为:
(4)
可见,通过MPPT控制模块向PWM驱动电路输出电压信号来产生功率管驱动信号控制占空比D,最终实现光伏电池工作于最大功率点处[14]。
3 电导增量法原理及误判分析
3.1 电导增量法原理
分析图2,电压逐渐增大时,P-U曲线的导数dP/dU由大于0逐渐减小直到小于0,其中dP/dU=0时为最大功率点,且在最大功率点右侧时,dP/dU变化速率较快。因此可以得到:
1) dP/dU=0,光伏电池工作于P-U曲线的最大功率点处,保持电压不变;
2) dP/dU>0,光伏电池工作于P-U曲线的最大功率点左侧,需增大输出电压;
3) dP/dU<0,光伏电池工作于P-U曲线的最大功率点右侧,需减小输出电压。
所以,可以通过判断dP/dU来判断光伏阵列是否工作在最大功率点,并根据所处工作状态加以调整。
实际电路,对电压和电流能够直接采样,而功率P无法直接获得,因此通常对表达式:dP/dU利用偏微分进行变换。
(5)
I/U为电导,dI/dU为电导增量,通过dP/dU进行最大功率跟踪,本质上为对电导增量判断,故称之为电导增量法[15]。
3.2 电导增量法误判分析
在环境条件剧烈变化的情况下,电导增量法存在着误判的可能。如图4所示,设当前光伏阵列工作时间点为k,输出采样电压电流值分别为U(k-1)、I(k),功率P(k)=U(K)*1(k);前一个采样周期工作于P(k-1),采样值为U(k-1)和I(k-1),功率P(k-1)=U(k-1)*I(k-1);后一个采样周期工作于P(k+1),采样值为U(k+1)和I(k+1),功率P(k+1)=U(k+1)*I(K+1)。则dU和dI分别表示相邻两个采样周期之间U和I的差值。
假设光伏阵列一直工作在功率曲线a上,k-1处的曲线导数dP/dU>0,需增大电压U,所以设定dU>0,下一工作点调整到k点,可见P(k)>P(k-1)。此时采样U(k)和I(k)发现k点处dP/dU仍然大于0,同理需继续增大电压,继续设定dU>0。但此时,假设光照强度发生剧烈变化,功率曲线由a骤变到b,输出功率就会由P(k+1)变成P’(k+1)。由图可见此时dU>0,但dP<0,则dP/dU<0,需减小输出电压U,而事实上需继续增加电压U,系统发生误判[16]。
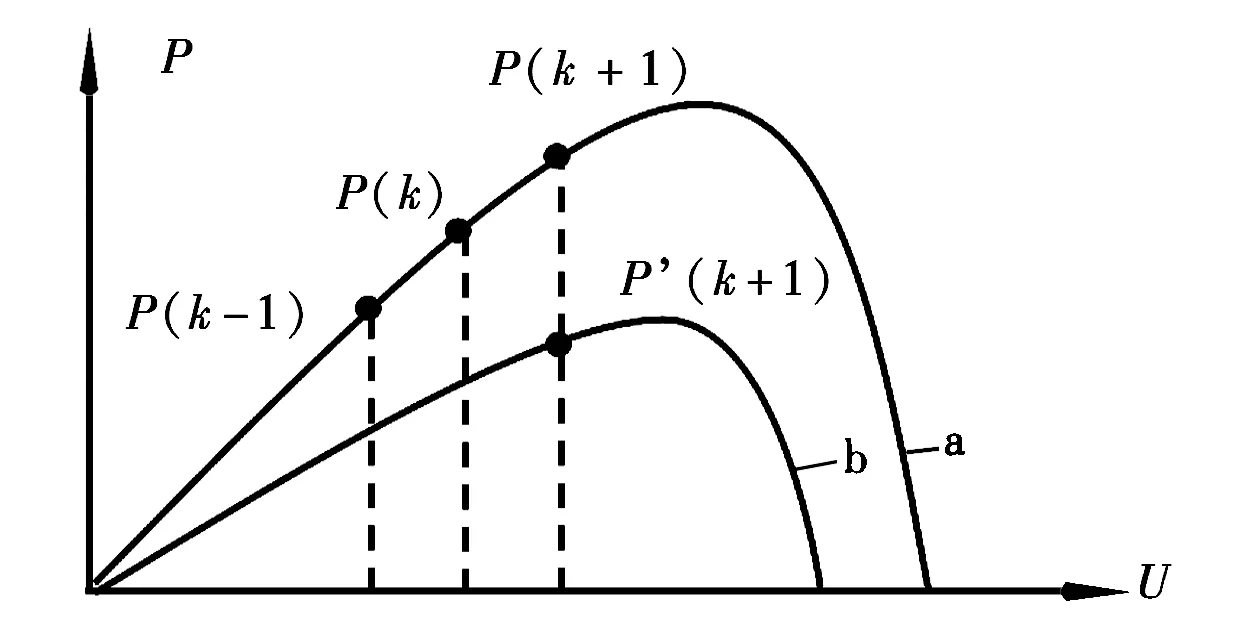
图4 不同光照强度的P-U特性曲线
以上分析可以看出,如果能够检测到光照突变,并对算法进行改进,可有效减少或避免程序误判带来的损失。
4 改进变步长电导增量法
4.1 光强突变
在外界条件不变的情况下,通过传统方法不难跟踪系统的最大功率点,但天气的变化使得系统无法工作在理想状态,所以在传统方法上做了相应改进。影响光伏电池的两大重要因素是光照和外界温度。温度的变化,相对于光照来说是很缓慢的,所以在研究MPPT跟踪技术时,可以大致认定短时期内,材料表面温度保持不变,只考虑改变光照强度的变化。
在标准状态下进行试验,保持工作点的电压不变的情况下,光伏电池的输出功率P与辐照量近似可成线性关系,即与输出电流I也近似成线性关系,当辐照量改变时,输出电流也会做出相应变化。
根据上述分析,同时根据光伏阵列I-U特性曲线,在dU=0时,工作点电压不变,辐照量变化一定会导致输出功率P的变化;在dU<0时,如果dI≤0,则说明光强变弱;如果dI>0,则说明光强变强。另外,可以设定一个范围阈值m,若|dI|>m,则认定光照强度发生较大变化。
4.2 变步长电导增量法
如图5所示,首先采样光伏电池k时刻电流、电压信号。

图5 改进变步长电导增量法流程图
1) 当dU≠0时,说明此时系统运行于不稳定状态,需调整跟踪最大功率点。
①当外部环境较为稳定时dI/dU<0,即电压变大,则光伏板的电流一定变小,此情况可以理解为在同一“P-U”曲线上进行最大功率跟踪。而当出现dI/dU≥0时,说明电压和电流变化趋势相同,则意味着最大功率跟踪装置需要在在不同的“P-U”曲线上跟踪最大功率点。并由此判断此时存在较大光强突变。由于电流变化方向与最大功率点的电压变化方向一致,所以取步长ΔU=m3·dI,可快速追踪光强变化引起的最大功率点电压变化。
②当dI/dU<0时,虽然电压电流变化趋势相反,符合特性曲线特征,但不能确定是否有一定的光强变化,需进一步判断。
设定m值为某一定值,当|dI|>m时,说明(k+1)时刻的特性曲线与k时刻的特性曲线差距较大,认为有相对较强的光强变化,可与①取相同步长ΔU=m3·dI来快速跟踪;
当|dI|≤m时,可认为光强无变化或变化忽略不计,光伏电池在同一特性曲线运行。若dP/dU≥0,说明此时运行于最大功率点左侧,需适当提高工作点电压,即设置步长ΔU>0。在此区域内,离最大功率点越远,dP/dU越小,而此时又需要增加步长;离最大功率点越近,dP/dU越大,此时为了精准跟踪不出现振荡,需要减小步长,所以设置步长ΔU=m1·(dP/dU)n,其中m1和n为大于1的适当常数,可扩大dP/dU>1时的步长,并缩小dP/dU<1时的步长,起到迅速变换步长从而缩短时间的作用。若dP/dU<0,说明此时运行于最大功率点右侧,应当降低工作电压,即ΔU<0。 在此区域内,dP/dU的变化速率相对较快,所以取ΔU=m2+dP/dU。
2)当dU=0时,需进一步判断是否工作于最大功率点。
①dP=0时,说明光伏电池的输出电流电压功率都处于稳定状态,即无光强变化时的最大功率点处,设置步长ΔU=0保持。
②dP≠0时,说明此时光强发生了变化,同样设置ΔU=m3·dI,实现MPPT控制。
5 仿真及结果
为了验证该方法的有效性,在MATLAB/Simulink系统中分别搭建了传统型与本文改进型电导增量法MPPT控制系统到PWM控制系统仿真模型。其中PV模块的参数设置如下:Uoc=44.7V,Isc=8.32A,Um=35.1V,Im=7.95A。在仿真平台上,仿真时间设置为1s,光照强度R=700W/m2,温度T=25℃(298K)。在t=0.3s时开启MPPT控制,在t=0.5、 0.7、 0.8s时,光照强度分别突变为R=1 400、1 200、500W/m2。从图7输出功率仿真结果可见,在光强突变时,传统型电导增量法会因跟踪不够及时导致短时间能量损失,尤其在光强突变较大时尤为明显,而改进型变步长电导增量法则可修复此问题,较好的实现MPPT控制。
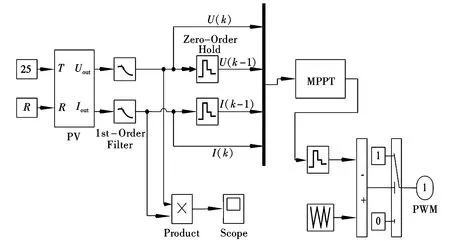
图6 MPPT算法的Simulink仿真

图7 输出功率的仿真结果
6 结论
本文利用光伏电池工作电流、电压变化与光强变化之间的关系,针对传统的电导增量法INC的原理及存在的误判问题,提出一种变步长改进电导增量法,此方法同样可以改进扰动观察法。该方法实现简单,能在光强突变的情况下,保证光伏阵列快速准确的跟踪到最大功率点,而且稳态精度高,振荡较小,可以实现对太阳能的高效利用,大幅降低能源浪费。最终通过Simulink仿真平台验证了该方法的可行性。主要结论如下:
(1)变步长电导增量法与传统电导增量法稳态跟踪效果相同,具有同等效果的跟踪精度,保障了稳态功率跟踪,最大效能的利用光伏新能源。
(2)与传统电导增量法相比,变步长电导增量法主要通过通过观测dI/dU的符号和变化深度,识别是否在不同“P-U”曲线进行跟踪,并以改变步长实现快速的最大功率跟踪,相较于传统电导增量法具有更快的动态跟踪能力。
(3)相较于传统电导增量法,变步长电导增量法,算法复杂度增加较小,完全具备嵌入式控制器工程移入条件,工程可实现性较高。
虽然文中的改进变步长算法在仿真平台中实现了其可行性,但由于时间及能力限制,仍存在一些问题需要进一步探讨和改进。比如:本算法只在仿真平台上搭建模型和模拟运行,并未在实际系统中实践;本算法仅考虑光照强度突变情况,并未研究在局部阴影或温度骤变等多种外界条件变化时的输出特性;文中仅搭建了MPPT部分的仿真模型,尚未对整个逆变系统进行深入研究。如今光伏发电并网技术日益成熟,应该对并网技术及电压谐波、电磁辐射等问题进一步研究讨论。
猜你喜欢
湖北大学学报(自然科学版)(2022年5期)2022-09-07
北京航空航天大学学报(2022年5期)2022-06-06
健康护理(2022年3期)2022-05-26
当代陕西(2022年6期)2022-04-19
福建师范大学学报(自然科学版)(2022年2期)2022-03-16
成都信息工程大学学报(2021年5期)2021-12-30
当代水产(2021年8期)2021-11-04
西安邮电大学学报(2021年1期)2021-04-19
无线电通信技术(2019年4期)2019-06-25
妇女生活(2019年1期)2019-01-17