免耕播种机星齿凹面盘式清秸防堵装置设计与试验
2019-03-06 09:07贾洪雷朱龙图李名伟赵佳乐
农业机械学报 2019年2期
王 奇 贾洪雷 朱龙图 李名伟 赵佳乐
(1.吉林大学生物与农业工程学院, 长春 130022; 2.吉林大学工程仿生教育部重点实验室, 长春 130022)
0 引言
秸秆覆盖地免耕播种是一项先进的耕作技术[1],具有节约生产成本、保护土壤和生态环境等优点,近年来在东北地区已得到大面积推广[2-4]。该地区气候低温易旱、玉米生长周期较长,致使玉米秸秆较为粗壮、量大且难以腐烂[5],春播时秸秆全量粉碎还田的秸秆覆盖量过大、粉碎长度不一致且分布不均匀,降低了防堵装置的清秸率和作业稳定性,易造成秸秆残茬缠绕、堵塞播种机,降低播种作业质量和工作效率[6-7]。清理播种行内的秸秆和残茬还具有提升地温,提高种子的出苗率和出苗一致性,增加产量等优点[8-11]。因此,高质量的清秸防堵作业是保障秸秆覆盖地免耕种植模式作业质量的基础。
目前,防堵装置按照工作原理可分为驱动式和被动式,其中被动平面轮盘式防堵装置因具有土壤扰动小、保墒效果好、作业阻力低等优点,已得到了广泛应用[12]。近年来,相关学者对被动平面轮盘式防堵装置的轮指结构[13-16]和轮盘结构[17]进行改进设计,以提高其作业质量。平面轮盘式防堵装置在半量秸秆还田或垄上作业时具有较高的作业质量,当秸秆覆盖量过大时,其供给秸秆的抛出速度不足[17],对秸秆的抛掷和推送作用降低,无法及时清理过量的行间秸秆,降低了清秸率;基于2BMZF-2 型免耕播种机改进设计的凹面结构爪式秸秆清茬机构,一定程度上提高了对秸秆的抛掷速度和清秸率,但是浮动且与机架铰接的防堵机构无法使其在最佳工作参数下稳定作业,作业稳定性差;且对置安装的轮盘存在漏清区,限制了清秸率的提高。目前,该地区应用的免耕播种机通常安装与播种单体架铰接的平面爪轮式拨茬防堵机构,当在全量秸秆覆盖地作业时,特别是在垄间作业时,同样存在上述问题。因此,需要开发一种适合该地区玉米种植模式的防堵装置。
针对上述问题,本文设计一种能够在中国东北地区玉米秸秆全量粉碎还田进行高效清秸防堵作业的被动式星齿凹面盘式防堵装置,通过理论分析确定清秸盘结构参数及取值范围;通过离散元仿真试验获得清秸盘的最佳结构参数组合;通过田间对比试验验证该装置的作业性能。
1 整体结构与工作原理
1.1 整体结构
星齿凹面盘式清秸防堵装置的结构如图1所示,由固定架、平行四杆架、作业深度调节推杆、清秸盘安装架和星齿凹面清秸盘组成。

图1 星齿凹面盘式清秸防堵装置结构简图Fig.1 Structure diagram of star-toothed concave disk row cleaners1.固定架 2.平行四杆架 3.作业深度调节推杆 4.清秸盘安装架 5.星齿凹面清秸盘
1.2 工作原理
该清秸防堵装置安装在免耕播种单体的正前方,沿着拖拉机的前进方向运动。作业前,通过作业深度调节推杆调节清秸盘星齿的入土深度,使星齿穿过秸秆残茬层并切入恒定深度的土壤层。作业时,清秸盘在机具的拉力和土壤的反作用力共同形成的力偶作用下绕定轴被动转动,星齿沿切刃方向自远及近逐渐切入秸秆残茬层和土壤层,对其正下方秸秆和土壤进行切削破碎,各星齿顺次切削以保证清秸防堵装置作业深度的稳定性;清秸盘外侧的秸秆残茬沿着外表面向苗带两侧运动,且秸秆横向移动距离逐渐增加,当秸秆运动到清秸盘与地面交接的末端时,秸秆在合力的作用下,沿着星齿部分凹曲面的切线方向被侧向抛出;被抛掷的秸秆在惯性力和自身重力的作用下落在所清理苗带的两侧,形成一条清洁的播种区域。随后,播种单体在所形成的苗带上进行播种。
2 星齿凹面盘式清秸防堵装置设计
2.1 清秸防堵作业运动学分析
将田间的粉碎秸秆视为散粒体,对其进行力学分析。认为在苗带清秸过程中清秸盘的前进速度和转速为匀速运动,作业深度保持稳定[18-19]。如图2所示建立空间直角坐标系Oxyz,x轴为清秸防堵装置作业时前进方向,y轴为水平面内与x轴垂直方向,z轴为竖直方向。分析秸秆颗粒脱离清秸盘瞬时的受力情况,包括秸秆颗粒受到的盘面瞬时支持力N(与清秸盘垂直平面夹角为γ)、秸秆颗粒受到的盘面摩擦力f(清秸盘平面上被考察点的切线方向)和其自身重力G。秸秆颗粒受到的合力为F,方向与其绝对运行方向相同。

图2 秸秆颗粒在清秸盘面运动简图Fig.2 Kinematic diagrams of straw particles at surface of disc row cleaner
将支持力N和摩擦力f向坐标轴方向进行分解,则秸秆颗粒沿坐标轴方向的运动微分方程为
(1)
式中m——秸秆颗粒质点质量,kg
g——重力加速度,m/s2
t——秸秆脱离清秸盘的时间,s
γ——秸秆颗粒受到的盘面瞬时支持力与清秸盘垂直平面夹角,(°)
θ——清秸盘圆心和其与土壤交点的连线与竖直方向的夹角,(°)
α——清秸盘平面与前进方向夹角,(°)
φ——秸秆颗粒与清秸盘间摩擦角,(°)
由式(1)可得
(2)
式中vx、vy、vz——秸秆颗粒在x、y、z轴方向分速度,m/s
由式(2)可知,影响秸秆颗粒脱离速度的主要外界因素是α、θ、γ。
由清秸盘的结构可知
(3)
式中r——清秸盘回转半径,mm
h——清秸盘入土深度,mm
e——偏心距,mm
ρ——曲率半径,mm
q——圆盘曲面投影长度,mm
由式(3)可知,影响秸秆颗粒速度的清秸盘结构参数为清秸盘回转半径r、圆盘曲面投影长度q和曲率半径ρ。
2.2 清秸盘结构参数的确定
2.2.1圆盘曲面
2.2.1.1清秸盘回转半径r
图3为清秸盘作业时安装示意图。

图3 清秸盘安装示意图Fig.3 Working diagram of disc row cleaner
清秸盘平面与前进方向夹角为α,因此,单个清秸盘的有效清秸宽度为
b=Lmnsinα
(4)

(5)
式中b——清秸盘有效清秸幅宽,mm
Lmn——清秸盘与土壤接触的有效长度,mm
为了消除两个清秸盘间的漏清区,将清秸盘前后交错配置,如图4所示。

图4 清秸防堵装置理论幅宽示意图Fig.4 Sketch of theoretical width of row cleaners
因此,清秸防堵装置形成的理论幅宽为
(6)
式中B——清秸防堵装置理论幅宽,mm
根据星齿部分深入秸秆层及土层深度要求,按照经验公式[18]计算
D=2r=KH
(7)
式中D——清秸盘直径,mm
K——径深比(选取范围为3~5,设计时有效作业深度大取小值,反之取大值)
H——星齿深入秸秆及土层深度,mm
清秸盘直径还要满足结构要求
D>2H+c
(8)
式中c——连接法兰盘最大外径,mm
2.2.1.2曲率半径ρ和圆盘曲面投影长度q
如图5所示,清秸盘回转半径确定后,清秸盘的凹面结构由曲率半径ρ和圆盘曲面投影长度q共同决定。研究表明[20],增加星齿部分的曲率和减小圆盘曲面投影长度均能加强清洁盘对秸秆的侧推和抛掷性能,但是曲率过大或圆盘曲面投影长度过小将使作业阻力增加。因此,曲率半径ρ和圆盘曲面投影长度q为影响清秸盘作业质量的重要结构参数。

图5 清秸盘凹面结构示意图Fig.5 Schematic of disc row cleaner
综合上述分析,根据东北地区采用免耕覆盖种植模式进行播种作业时的田间实际情况,以及玉米免耕播种机清秸防堵装置的安装结构参数进行本装置的结构参数设计。根据玉米免耕播种作业技术要求,免耕播种机作业时对土壤扰动需小于田面的30%,且应为播种作业准备出15~25 cm的播种区[1]。东北地区玉米常规垄距为650 mm,春季播种时覆盖在地表的秸秆层厚度为40~50 mm,为使清秸轮转动效率高,设清秸盘入土深度h为20 mm,选取径深比K为5,清秸盘法兰盘结构尺寸c为120 mm,清秸盘平面与前进方向夹角α为30°[16]。综合以上设计要求,经过计算,确定取值范围为150 mm≤r≤180 mm、30 mm≤q≤70 mm、160 mm≤ρ≤190 mm。
2.2.2圆盘星齿
2.2.2.1星齿刃口曲线


图6 星齿刃口曲线示意图Fig.6 Diagram of star-toothed edge curve
星齿刃口曲线的参数方程为
p2-2dpsinψ=R2-d2
(9)
式中p——切刃上任一点到清秸盘圆心距离,mm
d——切刃的偏心距,mm
ψ——过切刃上任一点和清秸盘圆心连线与水平方向夹角,(°)
R——切刃的偏心圆半径,mm
(10)
2.2.2.2星齿数量
星齿布置如图7所示,为保证星齿对地表的粉碎秸秆具有连续的拨动和抛掷作用,同时避免两星齿根部出现夹秆现象,按照农业机械设计手册[18]要求计算星齿数量
(11)
式中s——相邻齿根弦长,应略大于秸秆直径,mm
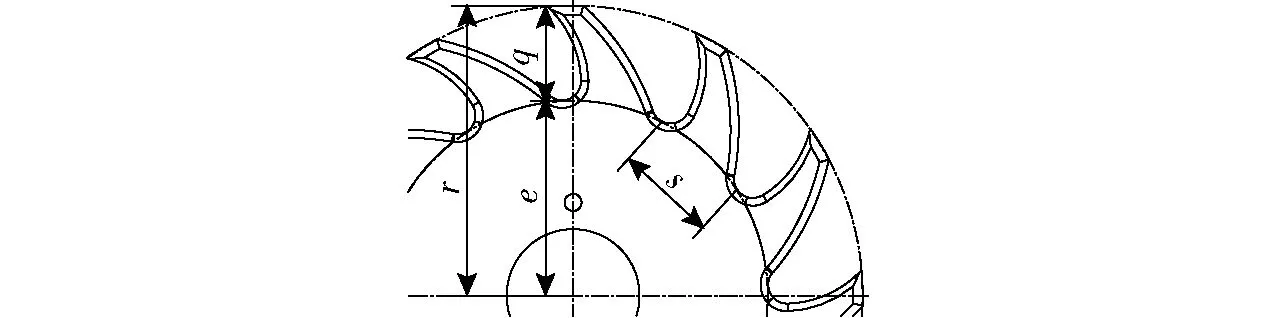
图7 星齿数量计算简图Fig.7 Diagram of star-toothed number calculation
由式(11)可知,星齿数量i与回转半径r、圆弧投影长度q有关,因此需根据不同结构参数确定清秸盘星齿的数量。
2.3 清秸盘安装架设计
清秸盘工作参数的变化影响清秸防堵装置的作业质量。由于作业环境地表不平、坚实度不一致和秸秆量不均匀等,使清秸防堵装置在作业过程中产生竖直方向的位移变化。如图8a所示,平面爪轮式清秸防堵装置铰接在播种单体上,当清秸盘竖直方向位移变化量为Δh时,清秸盘的安装倾角变化量为Δβ,改变了清秸防堵装置设定的最优工作参数,影响苗带清秸质量。针对此问题,本文运用平行四杆机构设计清秸盘的安装架,如图8b所示,可使清秸盘始终保持设置的工作参数运行,避免因地况的变化导致清秸质量的下降。

图8 清秸防堵装置工作参数随深度变化示意图Fig.8 Sketches of working parameters changed with working depth
3 离散元仿真
运用离散元仿真软件EDEM建立作业部件-土壤-秸秆间作用模型,以苗带清秸率和作业阻力为主要评价指标,模拟清秸防堵装置田间作业环境,分析影响清秸防堵装置作业性能的主要因素,寻求最优结构参数组合,为后续田间试验奠定基础。
3.1 离散元模型建立
3.1.1清秸防堵装置模型
为合理有效地进行仿真模拟与计算,对清秸防堵装置模型进行简化处理,去除其工作过程中无关的部件。运用三维制图软件Creo 对清秸防堵装置进行实体建模(比例1∶1),以.igs格式导入EDEM软件Geometry项中,仿真模型如图9所示。设置仿真模型的材质属性为45号钢,泊松比为0.31,剪切模量为7.0×1010Pa,密度为7 800 kg/m3。

图9 星齿凹面清秸盘几何模型Fig.9 Geometric model of row cleaners
3.1.2土槽模型
为简化模型,缩短仿真时间,采用直径为8 mm的球体作为土壤颗粒模型[23-24],设定土壤颗粒力学关系模型为Hertz-Mindlin with bonding模型,剪切模量为1.0×106Pa,密度为1 850 kg/m3,泊松比为0.38;根据粉碎秸秆的实际尺寸,采用8个直径为20 mm、球心间距为10 mm的球体组成的长为90 mm的长线性模型作为秸秆颗粒模型,设定秸秆颗粒力学关系模型为Hertz-Mindlin无滑动接触模型,泊松比为0.4,剪切模量为1.0×106Pa,密度为241 kg/m3。根据文献[24]得到仿真材料的接触参数如表1所示。

表1 仿真材料接触参数Tab.1 Material contact parameters of simulation
为模拟实际田间清秸作业状态,运用EDEM软件建立虚拟土槽,根据该地区春季播种前田间秸秆覆盖情况,设定土壤层厚度为50 mm,秸秆层厚度为40 mm,设置土槽尺寸(长×宽×高)为2 000 mm×650 mm×100 mm,将其设定为虚拟颗粒工厂,保证槽内存有充足颗粒进行仿真,如图10所示。在生成土壤颗粒过程中,使其仅在重力作用下自由沉降,且整体生成后在颗粒群上方加载校准土壤密度所需的垂直载荷,进行土壤模型压实,使仿真与实际土壤一致。

图10 虚拟土槽模型Fig.10 Virtual model of bench
3.2 虚拟仿真过程
在虚拟仿真过程中,设置清秸防堵装置位于土槽一侧进行初始作业。根据机具实际作业状态及免耕播种农艺要求,设置该装置前进速度为2.22 m/s、清秸盘入土深度为20 mm。为保证仿真的连续性,设置其固定时间步长为Rayleigh时间步长的15%,总时间为7 s,网格尺寸设置为土壤颗粒尺寸的2倍,以便对后续数据精准处理。仿真过程如图11所示。

图11 清秸作业EDEM仿真Fig.11 EDEM simulation processes of strap row clearing
4 EDEM虚拟仿真试验
4.1 虚拟仿真试验设计
为研究清秸防堵装置作业质量与作业阻力变化规律,分析影响苗带清秸作业性能的主要因素,得到理想结构参数组合,进行EDEM 虚拟仿真正交试验研究。根据理论分析结果,确定清秸盘回转半径、曲率半径和圆盘曲面投影长度为试验因素,以作业后苗带清秸率和作业阻力为试验指标,采用三因素三水平Box-Behnken设计试验确定清秸盘最佳参数组合[25-26],试验因素和编码如表2所示。

表2 试验因素编码Tab.2 Coding of experimental factors
4.2 试验指标
由于目前国内外尚无评价苗带清秸作业质量的统一标准,通过查阅相关资料并结合实际玉米免耕播种作业技术要求[27-28],选取苗带清秸率为试验的评价指标,同时考察该装置在工作过程中的作业阻力。
(1)苗带清秸率
利用EDEM软件的solve report模块,可以得到建立的秸秆颗粒在仿真作业前后的数量变化,提取作业前后线框区域内秸秆颗粒数量,如图12所示。

图12 清秸率测试区域示意图Fig.12 Schematic of clearing rate test area
对苗带区域内部清洁率进行计算
(12)
式中C——苗带清秸率,%
S1——仿真作业后秸秆数量
S——仿真作业前秸秆数量
(2)作业阻力
运用EDEM软件的Analyst项的Graph模块,获取清秸轮作业过程中的实时受力数据,如图13所示,计算其在稳定工作阶段的受力平均值作为试验结果。

图13 清秸轮受力随时间变化曲线Fig.13 Force-time chart of row cleaner
4.3 试验结果分析与优化
虚拟试验操作值与参数设计值无误差,可根据数据进行结果分析,具体试验方案与结果如表3 所示,x1、x2、x3为因素编码值。
通过Design-Expert软件对试验数据进行回归分析和因素方差分析,筛选出影响显著因素,从而得出清秸率y1和作业阻力y2的回归方程

(13)

(14)
为直观分析试验因素与指标间关系,运用Design-Expert软件得到响应曲面图,如图14所示。
根据上述回归方程和响应曲面图可知,清秸轮回转半径和曲率半径间对清秸率存在交互作用,如图14a所示,其中曲率半径比回转半径对清秸率的影响显著;当回转半径一定时,清秸率随曲率半径增加而降低;当曲率半径一定时,清秸率随回转半径增加而降低。曲率半径和圆盘曲面投影长度间对清秸率和作业阻力均存在交互作用,如图14b、14d所示,其中曲率半径比圆盘曲面投影长度对清秸率和作业阻力的影响显著;当曲率半径一定时,清秸率随圆盘曲面投影长度增加而降低,作业阻力随圆盘曲面投影长度的增加而下降;当圆盘曲面投影长度一定时,清秸率随曲率半径增加而降低,作业阻力随曲率半径的增加而下降。回转半径和圆盘曲面投影长度间对作业阻力存在交互作用,如图14c所示,其中圆盘曲面投影长度比回转半径对作业阻力的影响显著;当回转半径一定时,作业阻力随圆盘曲面投影长度增加而降低;当圆盘曲面投影长度一定时,作业阻力随回转半径增加而升高。分析上述影响规律产生的原因可知,增大清秸盘的回转半径,降低了清秸盘的转动速度,减弱了清秸盘对秸秆的抛掷作用,从而使清秸率下降;同时,增加了清秸盘在相同作业深度条件下的有效作业面积,从而使作业阻力上升。增大曲率半径,降低了其对秸秆的抛掷速度,减小了清秸盘的有效作业面积,从而使清秸率和作业阻力均下降。增大圆盘曲面投影长度,增大了相邻星齿的间距,使作业过程中漏清的几率增加,同时减小了清秸盘有效作业面积,从而使清秸率和作业阻力均降低。

表3 试验方案与结果Tab.3 Schemes and results of tests
为得到该清秸防堵装置最优结构参数组合,对试验因素进行优化设计,遵循提高苗带清秸率、降低作业阻力的原则,采用多目标变量优化方法,结合试验因素边界条件,建立非线性规划参数模型为
(15)
基于Design-Expert软件中的多目标参数优化(Optimization)模块对数学模型进行分析求解,从优化结果中选取一组合理参数组合,即当清秸盘回转半径为152.5 mm,曲率半径为160 mm,圆盘曲面投影长度为50.9 mm时,清秸防堵装置作业性能较理想,其清秸率为91.2%,作业阻力为112.8 N。根据所优化的结果进行虚拟仿真验证,其清秸率为92.1%,作业阻力为114.2 N,与优化结果基本一致。
5 田间试验
为验证星齿凹盘式清秸防堵装置在田间作业时的工作性能,于2018年10月在吉林大学农学部试验田进行田间试验。试验田的土壤类型为东北黑钙土,试验地前茬作物为玉米,秋季采用自走式玉米收获机收获的同时将全量秸秆进行粉碎还田处理。试验期间日平均气温为12~16℃,无降雨。表4为试验时田间地况的主要参数。
加工试制星齿凹面盘式清秸防堵装置,清秸盘的结构参数选取优化后的结果:清秸盘回转半径为152.5 mm,曲率半径为160 mm,圆盘曲面投影长度为50.9 mm。星齿凹面盘式清秸防堵装置安装在带有限深地轮的三点悬挂架上,通过悬挂架与拖拉机相连,同时在悬挂架上安装平面爪轮式清秸防堵装置作为对照。试验前,将两清秸防堵装置的清秸盘(轮)调至同一水平高度,调节拖拉机的上、下拉杆保证机架与地面保持水平,并调整清秸盘的入土深度为20 mm。试验时,控制拖拉机的前进速度为2.22 m/s(8 km/h),测试区域为50 m。田间试验现场如图15所示。

图15 田间试验现场Fig.15 Platform experiment
每次试验结束后,对苗带清秸率和苗带清秸宽度进行测量,测试点为稳定工作区内间隔2 m的连续10个测点,使用电子天平称量苗带清秸宽度内的残留秸秆质量,并与该区域内试验前秸秆质量作比值,计算苗带清秸率;使用钢尺对测点的苗带清秸宽度进行测量。每次试验过程中,通过六分力测试系统分别对两种防堵装置的作业阻力进行测定。试验重复3 次,测试结果取平均值作为试验结果,试验效果和测量过程如图16所示,相关数据结果如表5所示。

图16 作业效果及测量指标Fig.16 Operation effect and measurement index

装置类型苗带清秸率/%苗带清秸宽度/mm作业阻力/N测量值平均值测量值平均值测量值平均值星齿凹面盘式清秸防堵装置93.491.391.992.2251.7235.5240.3242.5146.4137.7143.6142.6平面爪轮式清秸防堵装置72.475.868.772.3178.5186.2172.4179.0182.7197.5176.4185.5
由表5可知,在相同工况下星齿凹面盘式清秸防堵装置田间的苗带清秸率为92.2%,作业阻力为142.6 N,苗带清秸宽度为242.5 mm,均优于平面爪轮式清秸防堵装置,且苗带清秸率提升效果显著(P<0.01)。分析对比试验结果可知,清秸盘的凹面结构提高了粉碎秸秆的抛掷初速度,使秸秆更利于被分到苗带两侧;星齿凹面盘式清秸防堵装置的两个清秸盘相交错重叠,消除了清秸盘间的漏清区,使工作幅宽内的秸秆得到充分的清理;星齿凹面盘的切刃更易于切断秸秆和切入土壤,提高了作业深度和苗带清秸宽度的稳定性;平行四杆架维持清秸盘的工作参数,提高作业稳定性。通过与仿真试验结果进行对比分析可知,田间苗带清秸作业质量与仿真试验优化结果基本一致,但是实际作业阻力高于仿真结果,产生误差的原因可能是仿真环境过于理想,而田间土壤的含水率和容积密度更大,增加了作业阻力,但误差在可接受范围内。田间试验结果表明,星齿凹盘防堵装置达到很好的作业效果,清理的苗带满足免耕播种作业的农艺要求。
6 结论
(1)设计了一种新型星齿凹面盘式清秸防堵装置,能够在玉米秸秆全量粉碎还田地进行高效的清秸防堵作业,清秸率高,工作性能稳定,作业后地表满足免耕播种机播种作业要求。
(2)通过对秸秆在清秸盘表面的运动过程进行理论分析,得出影响清秸防堵装置作业性能的结构参数为清秸盘回转半径r、圆盘曲面投影长度q和曲率半径ρ,通过理论分析和数值计算确定了各结构参数的取值范围为150 mm≤r≤180 mm、30 mm≤q≤70 mm、160 mm≤ρ≤190 mm。
(3)以清秸盘回转半径、曲率半径和圆盘曲面投影长度为试验因素,以苗带清秸率、作业阻力为试验指标,采用虚拟正交试验方法建立了因素与指标间数学模型,运用Design-Expert软件对试验结果进行处理,采用多目标变量优化方法建立了优化模型,得出被动式星齿凹盘防堵装置的最优结构参数:清秸盘回转半径为152.5 mm、曲率半径为160 mm、圆盘曲面投影长度为50.9 mm。
(4)田间对比试验结果表明,星齿凹盘防堵装置清秸率为92.2%,苗带清秸宽度为242.5 mm,作业阻力为142.6 N,其综合作业性能优于平面爪轮式防堵装置,清理的苗带满足免耕播种作业的农艺和技术要求。
猜你喜欢
小哥白尼(军事科学)(2022年4期)2022-07-08
发明与创新(2021年39期)2021-11-05
今日农业(2020年19期)2020-11-06
吉林农业(2019年20期)2019-11-23
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
数学大世界(2018年16期)2018-07-30
Coco薇(2017年10期)2017-10-12
卷宗(2017年16期)2017-08-30
安全(2015年7期)2016-01-19