基于视觉的嫦娥四号探测器着陆点定位方法
2019-03-07 01:40万文辉赵焕洲王保丰荣志飞
载人航天 2019年1期
王 镓,万文辉,赵焕洲,王保丰,2,彭 嫚,荣志飞
(1. 北京航天飞行控制中心,北京 100094; 2. 航天飞行动力学技术重点实验室,北京 100094; 3. 中国科学院遥感与数字地球研究所,北京 100101)
1 引言
月球作为深空探测的前哨站和转运站,是人类探索宇宙、各国开展深空探测的首选目标[1]。我国月球探测工程始于20世纪90年代,2013年12月14日嫦娥三号月球探测器在月球虹湾地区成功着陆,实现了我国航天器首次地外天体软着陆。2018年12月8日发射的嫦娥四号月球探测器,实施世界上第一次月球背面软着陆和巡视探测,着陆区选定在月球背面南极——艾特肯盆地内的卡门撞击坑内[2]。探测器着陆点的快速高精度定位是实现这一过程的重要技术环节,也是地外天体探测器开展各项工作的重要前提。
目前国际上月球探测器着陆点的定位方法主要有基于地基测量和基于视觉图像两种[3]。基于地基测量的着陆定位技术是指利用地面跟踪站对着陆器进行测距测速和干涉测量(Very Long Baseline Interferometry,VLBI),结合月球运动信息,将测量数据进行综合平差处理,从而确定探测器在天体中的位置[4]。基于视觉图像的定位是指利用探测器着陆过程序列图像与轨道器卫星影像的配准关系和轨道器所携带相机的精密成像模型,结合已有的高精度数字高程模型来实现着陆器落点的定位[3]。嫦娥四号任务着陆区为月球背面,由于遮挡,传统测距、测速及VLBI测角技术在探测器动力下降段无法发挥作用,因此依靠视觉系统完成探测器着陆点的快速、高精度定位是一种主要的技术手段。
基于视觉图像的着陆定位技术在月球、行星、小行星和彗星的着陆与采样返回任务中均得到了应用[5]。深空1号(DS-1)小行星探测任务首次对该方法进行了试验验证,完全利用视觉图像的方法实现了自主轨道确定[6-7]。在火星探路者任务中,Golombek等利用Viking卫星影像与着陆器影像上人工选取的5对特征点通过方位角计算进行着陆点定位,定位精度达到100 m[8]。我国在嫦娥三号任务中也采用了视觉图像处理的方法实现探测器着陆点的定位。万文辉[9]、贾阳[10]等利用降落图像、导航相机图像和嫦娥二号DOM影像对着陆点位置进行解算,其定位结果均是在探测器落月后数小时完成的。Wagner[11]、刘斌[12]等利用月球勘测轨道器(Lunar Reconnaissance Orbiter,LRO)再次飞越着陆区上方获取的图像,以事后处理的方式对定位结果的精度进行了评估。目前,应用于工程中的着陆点视觉定位方法实时性不高,不能完全满足工程任务的实际需求。
本文在充分分析降落相机序列图像成像特点的基础上,针对相邻图像间的尺度与旋转变化特点引入SIFT匹配方法,基于相邻图像间获得的匹配点集建立同名像点的映射模型。结合着陆区高精度正射影像图(DOM),通过两类影像间的撞击坑匹配建立几何关系,将降落序列影像上的着陆点投影至着陆区DOM上并获取相应的地理位置,以提升定位效率。
2 着陆过程分析
相对于嫦娥三号任务,嫦娥四号任务的着陆区地形起伏程度明显增加且波动明显,因此在动力下降策略中进行了如下优化[2]:在主减速段结束后探测器调整姿态,由倾斜运动轨迹改为垂直向下运动轨迹,以实现测距波速指向与着陆点位置基本一致;同时,引入测距敏感器对导航滤波算法进行修正以保证高度方向导航结果的正确性,实现安全着陆。嫦娥四号任务探测器动力下降过程示意如图1所示。
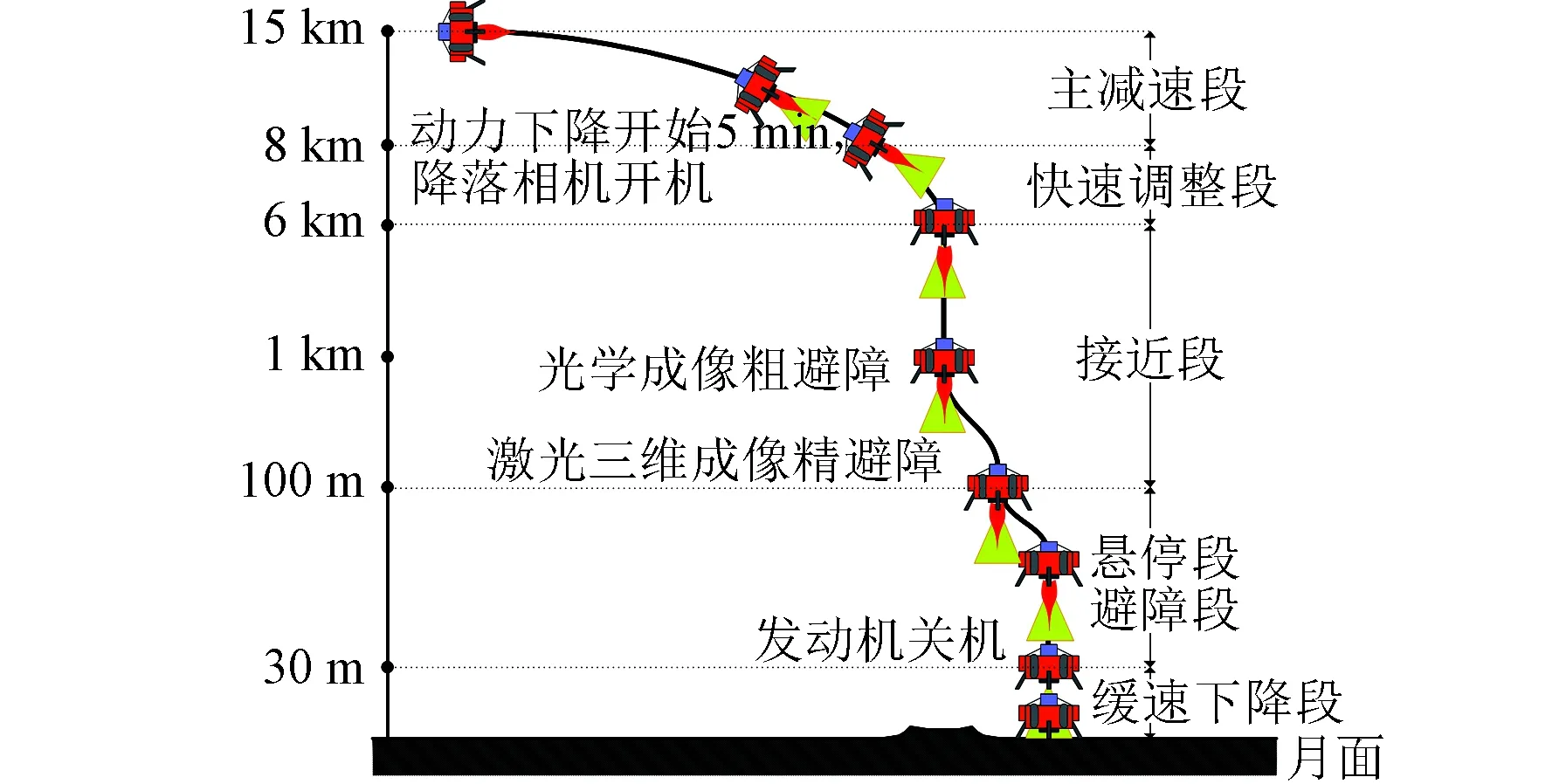
图1 嫦娥四号动力下降轨迹示意图[2]Fig.1 Powered descent of Chang′e-4[2]
同嫦娥三号任务一样,嫦娥四号探测器底部安装有降落相机,是1024×1024像素的面阵相机。在动力下降开始5 min后降落相机将开机随后开始抽帧下传降落相机的图像数据,直至探测器着陆月面后,降落相机关机。降落相机相关参数与嫦娥三号任务一致,在1×1(km2)范围内,影像分辨率高于1 m;在以着陆点为中心的50×50(m2)范围内分辨率可达到0.1 m[13]。由此可见,通过获取的降落相机图像,不仅能够连续反映探测器落月过程月球表面的变化范围,还能实时监视探测器的降落过程,并且影像的重叠度较高,是基于视觉的探测器着陆定位的重要数据源。
嫦娥四号任务主要采用国防科技工业局发布的由嫦娥二号月球探测器获得的分辨率为7 m的全月球影像图作为着陆点定位的基础数据。
3 着陆点定位方法
探测器着陆点的定位流程如图2所示,主要分为以下四步:首先利用降落相机下传的抽帧序列图像进行相邻图像重叠区域的特征提取与匹配,根据得到的匹配特征点集计算降落相机初帧图像和末帧图像的坐标变换关系,从而求解探测器落点在初帧图像中的像坐标;接着根据相邻图像间的坐标变换关系,建立成像面对应地面水平的约束条件,对图像进行单应变换,实现降落序列图像的着陆区图像拼接;然后,根据惯性导航提供的相关位置数据对预选着陆区DOM影像进行裁剪;最后,通过MeanShift算法依次完成撞击坑的提取、撞击坑的匹配,将拼接影像与裁剪的DOM进行配准,从而实现着陆点的高精度定位。
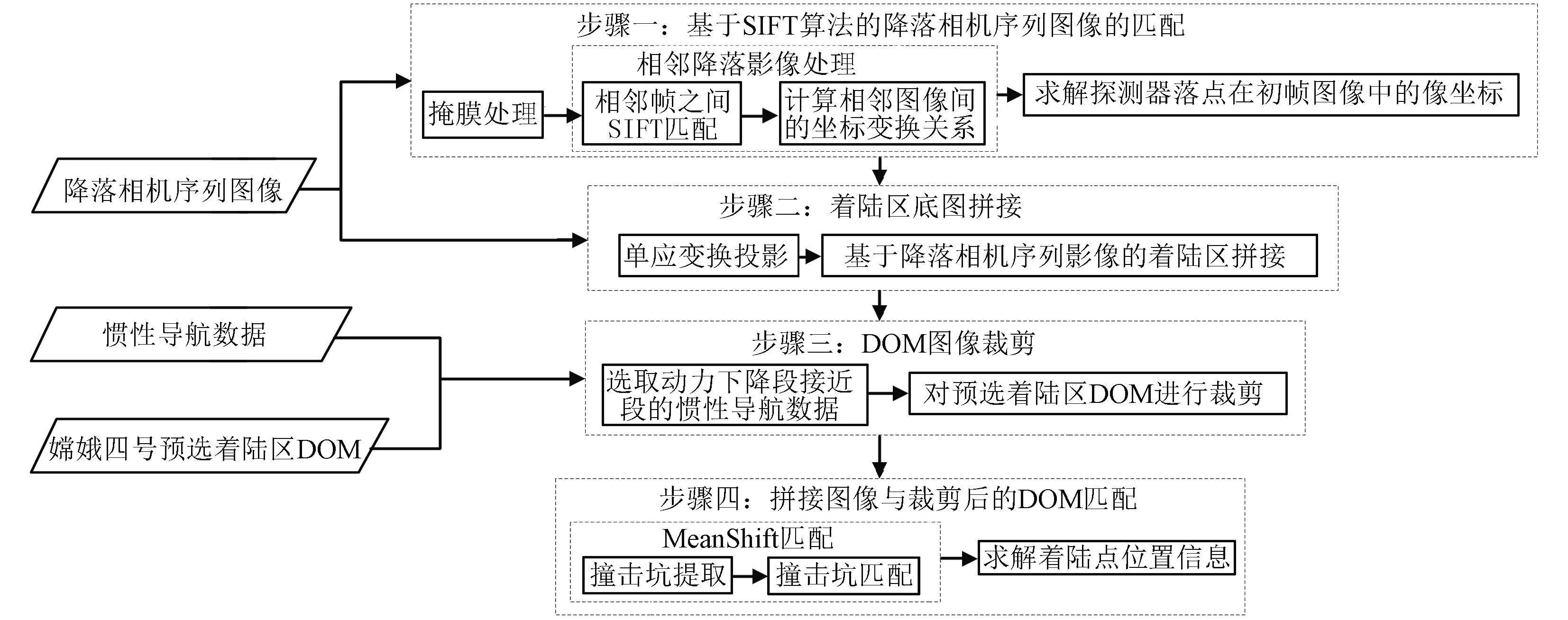
图2 着陆点定位实现流程图Fig.2 Flowchart of landing positioning
3.1 基于SIFT的降落相机相邻影像间的匹配
由于相邻两幅降落相机序列图像存在缩放、部分旋转等仿射变形,为获得稳健的匹配结果,选用SIFT特征提取作为图像仿射不变特征提取方法,并基于提取的特征实现图像间的匹配。具体步骤如下:
1)生成SIFT特征向量:获取降落相机在探测器着陆过程中拍摄的序列图像,分别生成相邻序列图像的SIFT特征向量。为了增强匹配的稳健性,对每个关键点使用4×4共16个种子点来描述。这样SIFT特征向量已经去除了尺度变化、旋转等几何因素的影响,后续再将特征向量的长度归一化,便可以进一步去除光照变化的影响。
2)特征匹配:采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量,如果最近的距离除以次近的距离小于某个比例阈值,则接受这一对匹配点。降低这个比例阈值,SIFT匹配点数目会减少,但会更加稳定。应用中为了获得足够多的特征点,一般取0.75~0.85。
3.2 基于降落相机图像的着陆区底图拼接
降落相机序列图像覆盖探测器从动力下降段主减速段至着陆月面过程中平扫过的月球表面纹理。为了便于实现与预选着陆区底图DOM进行配准,设计中将变分辨率降落相机序列图像进行拼接,以扩大图像数据区域范围。具体步骤如下:
(1)
式中,(x1,y1)、(x2,y2)分别为同名特征点在图像L1、L2上的像点坐标。
2)由上述单应变换参数计算拼接图像L1 M边缘四个角点(0,0)、(0,w-1)、(h-1,0)、(w-1,h-1),其中w为图像宽度,h为图像高度。它们在图像L2中的对应坐标范围记为R1-2。根据图像L1 M边缘四个角点坐标计算拼接图像L1 M的坐标范围,记为R2 M,同时计算它的起始坐标,记为O(w2M,h2M)。
4)依次传入后续降落相机图像L3至LN,同L2 M通过上述第1~3步构建L3 M至LNM,最终可获得经N张降落相机序列图像拼接的图像LNM。
3.3 基于MeanShift算法的拼接图像与着陆区DOM影像的匹配
拼接图像与着陆区DOM影像在成像时间、太阳高度角、太阳方位角均不相同,而这些因素又会导致两幅影像基于同一目标区域的纹理出现较大差异,常见的基于点特征的匹配算法均无法适用。实际上,月球表面又会布满大大小小的撞击坑,由于地形凹陷,这些撞击坑在影像中多会呈现出两侧坑沿明暗对比明显的特点。
MeanShift算法通过检测局部图像的特征矢量能够处理图像的缩放、旋转等变形带来的匹配困难的问题。依据现有的经验,目前该算法可适用于观测图(如拼接图像)与基准图(如着陆区DOM影像)6倍以内缩放的自动匹配。因此,在实施过程中可首先通过MeanShift提取两幅影像中撞击坑的中心位置[14]而得到相应撞击坑的分布情况,然后计算两幅影像中撞击坑分布的几何关系,从而实现影像间的特征匹配,具体的实现方法参见文献[9]。
4 实验与分析
考虑嫦娥四号与嫦娥三号任务的动力下降过程具有一定相似性,选用嫦娥三号任务接近段至缓速下降段的37幅降落相机序列图像数据、相关惯性导航数据及虹湾地区DOM影像进行着陆点定位实验,中间的处理结果见本章各节。经解算,嫦娥三号探测器着陆点位置信息为(44.1210°N,19.5112°W),与目前国内外公布的定位结果精度一致,见表1。

表1 嫦娥三号探测器着陆点定位结果统计
4.1 降落相机序列图像间的匹配
受降落相机安装位置影响,每幅降落相机图像中均有一部分固定区域被探测器支架遮挡。如果直接使用原始图像进行匹配,遮挡区域会产生一定数量的无效特征点。因此,在进行相邻序列降落图像的匹配运算之前,先对每幅图像进行预处理,图3(a)为一幅降落相机的原始图像,图3(b)为用于标记无效区域的掩模模板。
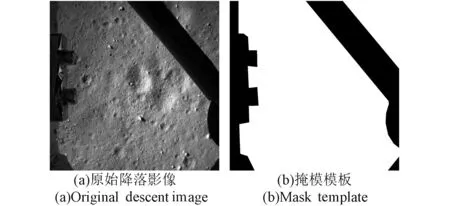
图3 降落相机原始图像与掩模影像Fig.3 Original descent imageand its mask template
利用SIFT算法进行相邻序列降落相机图像的匹配,其中降落相机图像共37幅,图像间隔约为5 s,具体的成像情况见表2所示。其中成像高度信息由惯性导航系统经由遥测信息下传提供给地面控制中心,是一个概略值,与实际情况存在一定的偏差。由表2中可以看出,图像23至图像32探测器在进行精避障,之后探测器发动机关机,图像33至图像37探测器缓速下降至月面,距月面高度接近于0,与设计的下降轨道基本一致。
记降落相机视场角为θ,探测器垂直月面的高度为h,月面视场距离为L,像素个数为s,图像分辨率为r。根据嫦娥三号任务降落相机相关参数,相机视场角θ=46.4°、像素个数s=1024,可将降落相机图像分辨率r表示如式(2):
(2)
根据每幅降落图像距离月面的高度计算其分辨率,结果见表2。由于图像23至图像37的距离月面高度不是很准确(表2中标红处),因此这几幅图像的分辨率也不是很准确。经事后分析,图像37的成像高度约为2 m,分辨率约为0.008 m/pixel。根据第3.1节给出的相邻序列图像的匹配算法,37幅降落相机相邻图像的(部分)结果如图4所示,计算出的探测器着陆点在每幅降落相机图像中的像点坐标见表2右侧两列。
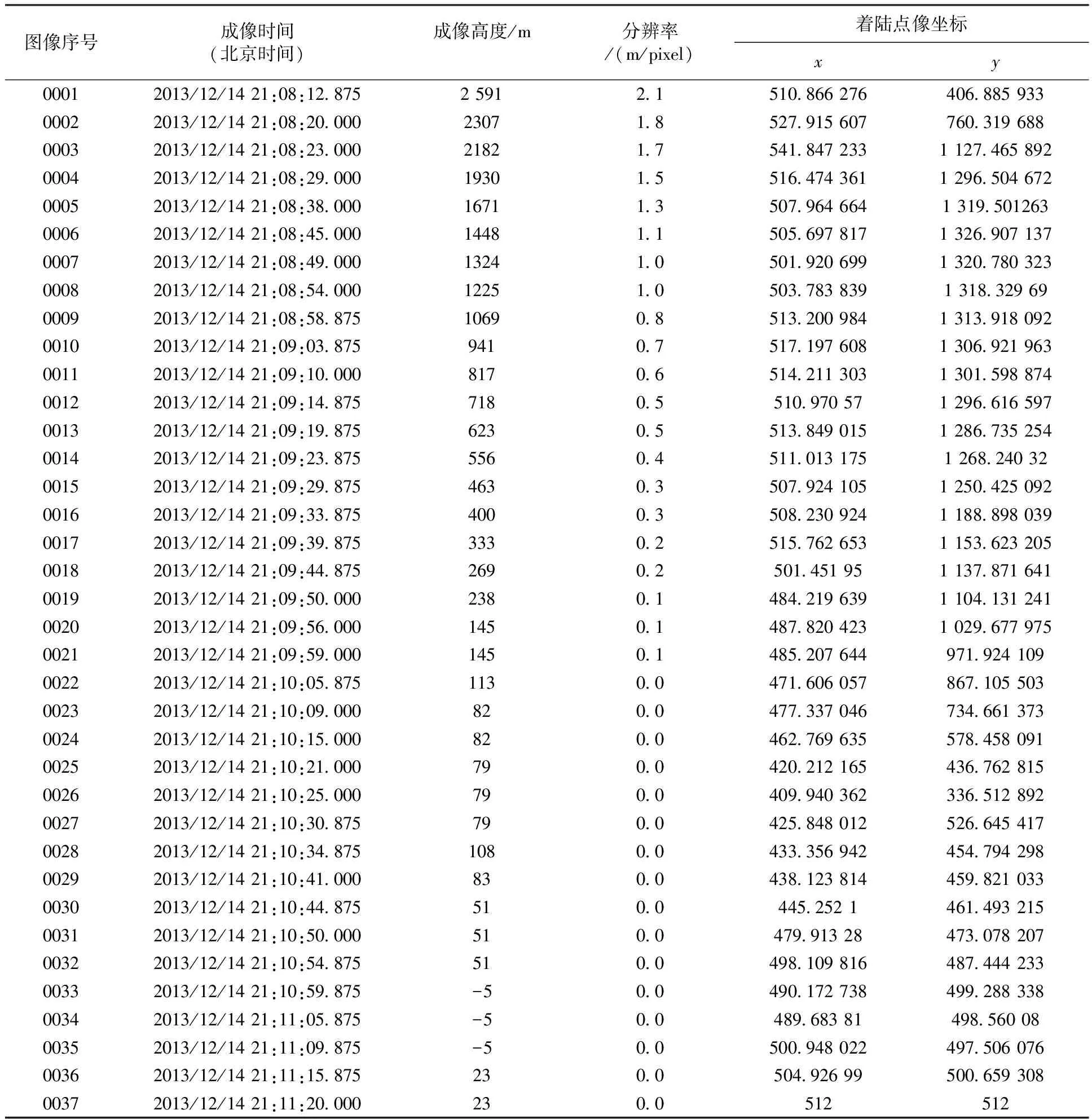
表2 降落相机成像情况

图4 相邻图像的SIFT匹配结果Fig.4 Matching results of adjacent descent imagesbased on SIFT
4.2 着陆区底图拼接
单应投影变换虽有9个待求解元素,实际上只具有8个自由度,理论上只需要有4对以上的同名特征点,就可以根据最小二乘原理求解出单应矩阵对应的各元素。由4.1节匹配结果看出,相邻图像的匹配结果经RANSAC剔除粗差点之后,剩余特征点对个数均大于100。由于拼接计算的位置可能是非整数的像素,在实际拼图过程中采用双线性内插方法进行像素点重采样。
图5给出了降落相机图像的拼接结果,其中白色的十字叉代表了着陆点在该幅拼接图像中的位置情况。可以看出,经拼接处理后能明显扩大图像的数据区域范围,有利于与预选着陆区底图DOM进行图像匹配。
4.3 拼接图像与着陆区DOM图的匹配
将4.2节获得的着陆区拼接图像与CE-3虹湾地区DOM图进行图像匹配。其中,CE-3着陆区DOM图由Lunar Orbital Data Explorer下载获得[16],选用的图像名称为:NAC_DTM_CHANGE3_M1144922100_160CM.tif,分辨率为1.6 m/pixel。
首先根据惯性导航提供的探测器的概略位置对该DOM进行裁剪,生成的图像记为IDOM。然后采用MeanShift算法,将拼接图像(记为Imosaic)与裁剪后的DOM图像(即IDOM)进行匹配,两幅影像的匹配结果如图6所示。
实验采用主频为3.0 GHz、操作系统为64位麒麟系统的图形工作站进行,其中37幅降落相机序列图像的匹配及拼接在2 min内完成全自动处理,精度优于1 pixel,相比文献[9]、[12]的方法在处理效率上有提升。由于成像时刻不同,降落相机图像与着陆区DOM影像纹理差异较大,匹配时加入适量的人工交互,匹配精度优于1 pixel。
5 结论
本文采用计算机视觉的相关方法在高精度图像匹配和几何变换的基础上实现了探测器月面着陆定位。使用嫦娥三号任务相关影像开展了探测器着陆点定位实验与精度验证,解算结果与目前国内外公布的各类定位结果精度一致。该方法将降落相机序列图像进行拼接,能有效扩大着陆区域范围,提高匹配成功率,实时性也较好。但其定位结果是一个相对值,定位精度与着陆区底图DOM的制图精度密切相关。下一步将开展“月球多源遥感数据的高精度着陆区制图”研究,为基于视觉的着陆点定位方法提供覆盖范围更广、精度更高的制图产品,同时也能为探测器落月后的路径规划和安全导航提供基础数据支持。
猜你喜欢
学与玩(2022年6期)2022-10-28
环球时报(2022-08-22)2022-08-22
英语世界(2022年5期)2022-05-18
金桥(2021年1期)2021-05-21
初中生世界·七年级(2021年3期)2021-05-14
家庭影院技术(2020年2期)2020-03-25
英语文摘(2019年4期)2019-06-24
CHIP新电脑(2016年3期)2016-03-10
微型计算机(2009年4期)2009-12-23
数码摄影(2009年12期)2009-12-07