
考虑序列关联性的公路隧道沉降预测模型
2019-04-16 12:22林晓东林浩
中外公路 2019年5期
林晓东,林浩
(同济大学 土木工程学院,上海市 200092)
公路隧道设计从传统的强度验证和稳定性验证,逐渐向关注结构变形控制的动态设计方法转变。隧道沉降是反映隧道结构安全性的一个重要指标,根据沉降监测数据分析结构当前安全状态,预测沉降的发展趋势,在实际工程中具有重要的意义。目前,隧道沉降的计算预测方法主要采用理论解析和数值模拟实现,如修正的Peck经验公式、基于弹性地基理论推导的纵向变形表达式、隧道数值模型和室内模型试验等。这类方法以土力学为基础,由于地质环境的隐蔽性与复杂多变性,土体物理力学参数存在随机性和不确定性,获取准确信息难度大,而且土体本身是非均质和各项异性的复杂介质,故此类预测方法难度较大。
近年有学者采用智能算法对隧道沉降进行预测,如人工神经网络、支持向量机与蒙特卡罗方法和灰色理论预测等模型均应用于沉降的预测,智能算法对于历史数据的拟合和未来数据的预测相对其他方法更准确,但这类方法不具有明确的物理含义,输入数据经过复杂的函数映射,在实际应用中很难解释训练的模型,甚至在数据较少的情况下,会出现过拟合的现象。
常用的具有完善理论推导和明确物理意义的模型有马尔科夫和时间序列模型,如马尔科夫链模型能较好地模拟沉降变形过程的随机性,时间序列模型可结合外部输入分析外部荷载、土体扰动等对沉降预测的影响。此类模型在建立时不需考虑反映系统的物理规律,而且可识别系统中的白噪声,被证明是一种简单并有效的方法。但传统的马尔科夫和时间序列模型忽略了模型之间的相关性,如一般的沉降监测在空间上是均匀布置的,靠得越近的监测序列理论上相关性越高,考虑相关性可为模型预测提供更多信息。
综上所述,该文在时间序列模型基础上:① 采用向量式时间序列模型,模拟多维时间序列变量当期量与滞后项的关联性;② 引入结构性方程,建立模型变量之间的当期相关关系,即在时间序列方程的左右端均包含变量的当期值。以上海某一公路隧道工程为案例,说明向量-结构时间序列的应用,并与传统时间序列进行对比。
1 时间序列模型概述
1.1 自回归模型
自回归的p阶模型记作AR(p),是用自身做回归变量,对于p阶自回归序列{yt}满足方程:
yt=ρ1yt-1+…+ρpyt-p+εt
(1)
式中:εt为扰动项,即模型在t期无法解释的部分,且εt独立于y1,…,yt-p;ρj为当前数据与j阶滞后的关系。定义滞后算子L为:
Lkyt=yt-k
(2)
则式(1)可重写为:
ρ(L)yt=εt
(3)
式中:ρ(L)=1-ρ1L-…-ρpLp,为AR模型的特征多项式。
1.2 滑动平均模型
滑动平均模型记作MA(q),形式为:
yt=εt+θ1εt-1+…+θqεt-q=θ(L)εt
(4)
式中:θ(L)=1+θ1L+…+θqLq,为MA模型的特征多项式。
1.3 自回归滑动平均ARMA模型
自回归滑动平均模型是由AR模型和MA模型组合得到,记作ARMA(p,q),联立式(3)、(4)可得:
ρ(L)yt=θ(L)εt
(5)
2 向量-结构时间序列
2.1 向量式
向量式(Vector)时间序列是根据数据统计性质建立的模型,其将系统中每一个变量当作所有内生变量滞后值的函数,将单变量的时间序列推广至多变量的时间序列,即向量式时间序列,对于自回归模型,其向量式(Vector AR,记作VAR)为:
yt=Φ1yt-1+…+Φpyt-p+εt
(6)
式中:yt为k维时间序列变量;p为滞后阶数;k×k维矩阵Φ为待估计参数;εt为k维扰动列向量。
考虑式(2)的滞后算子,式(6)可表示为:
Φ(L)yt=εt
(7)
式中:Φ(L)=1-Φ1L-…-ΦpLp,为向量式自回归模型特征向量。如果行列式det[Φ(L)]的根都在单位圆外,可将式(7)表示为:
yt=Φ(L)-1εt=A(L)εt
(8)
式中:A(L)=A0+A1L+…+AqLq。
式(8)为滑动平均模型的向量式(Vector MA,记作VMA),即自回归模型的向量式与滑动平均模型的向量式在一定条件下是可以相互转换的。
由式(6)、(8)可知:在方程的右边仅出现了变量系统的滞后值,不存在变量的同期联系,可采用普通的最小二乘法对参数进行估计。
2.2 结构式
如前所述,向量式时间序列没有建立变量的当期关系,而当期关联性信息被包含在扰动项εt中。可在向量式时间序列的基础上,引入结构性方程,即结构式(Structure),对于k个变量,p阶的结构-向量自回归模型(Structural Vector AR,记作SVAR)为:
C0yt=Γ1yt-1+…+Γpyt-p+ut
(9)
式中:
(10)
(11)

C(L)yt=ut
(12)
式中:C(L)=C0-Γ1L-…-ΓpLp,为结构式自回归模型的特征多项式。
如果矩阵多项式C(L)可逆,由式(13)可以得到结构-向量平均滑动模型(Structural Vector MA,记作SVMA)为:
yt=C(L)-1ut=B(L)ut
(13)

联立式(8)、(13)可得:
A(L)εt=B(L)ut
(14)
即由向量式的参数估计结果,可计算得到结构式的参数。
3 拓扑结构
以自回归滑动平均AR模型为例,其拓扑关系如图1所示,由式(1)可知AR模型的下一次预测为多个滞后项与同期的扰动项组成,由式(4)得MA模型的下一次预测由多个滞后扰动项组成,扰动项观测不到,只能通过模型从t=0时刻开始迭代计算,如图1描述的每一时间序列只与该时间序列历史数据有关,即每一序列都是独立的。
结构-向量时间序列模型则可从时间和空间两个维度进行数据分析,其拓扑关系原理如图2所示,空间关联性体现在:① 时间序列的当期值不仅仅由该序列的滞后项组成,还与在空间上相邻的时间序列的滞后项有关系,形式上将ARMA模型扩展成向量式形式,即时空时间序列;② 不同时间序列的同期变量,采用结构性方程建立同期之间的关联性,以考虑同期变量之间的相互作用。

图1 自回归滑动平均模型拓扑结构

图2 结构-向量时间序列模型拓扑结构
4 建模步骤
结构-向量时间序列模型的建模步骤如图3所示,首先选择参与建模的时间序列,采用AR根特征检验方法验证变量系统是否稳定,如果特征多项式的根的倒数均小于1,则变量系统是稳定的。若时间序列系统不稳定,应采用差分、去除趋势、调整模型变量等方法对变量进行处理。
确定变量系统后,可根据AIC(Akaike Information Criterion)或BIC(Bayes Information Criterion)信息准则确定滞后阶数:
AIC=-2l/T+2n/T
(15)
BIC=-2l/T+nlnT/T
(16)
式中:n为被估计的参数总数;T为样本长度;通过假定服从多元正态分布计算对数似然值l为:
(17)


图3 结构-向量时间序列的建模步骤
5 工程应用
以上海某一公路隧道为工程案例,比较传统时间序列模型和结构-向量时间序列模型的预测效果。该公路隧道于20世纪90年代建成,全长约742 m,在隧道上每隔20 m左右布设沉降监测点,从1996年开始至2012年,每年进行两次沉降监测,隧道全线的历史沉降曲线如图4(a)所示。该文选取s20监测点作为研究对象,其监测数据如图4(b)所示。

图4 隧道沉降数据描述
5.1 传统时间序列
由图4(b)和稳定性分析知监测数据并非平稳时间序列,经分析采用沉降数据的二阶差分2s作为预测时间序列,根据序列的自相关系数函数和偏相关系数函数,以及AIC和BIC信息准则,确定采用AR(3)模型进行模拟,参数估计结果为:
(18)
该模型的沉降二阶差分预测结果如图5(a)所示,拟合R2=0.685,残差结果如图5(b)所示,经验证符合均值为0的白噪声序列。
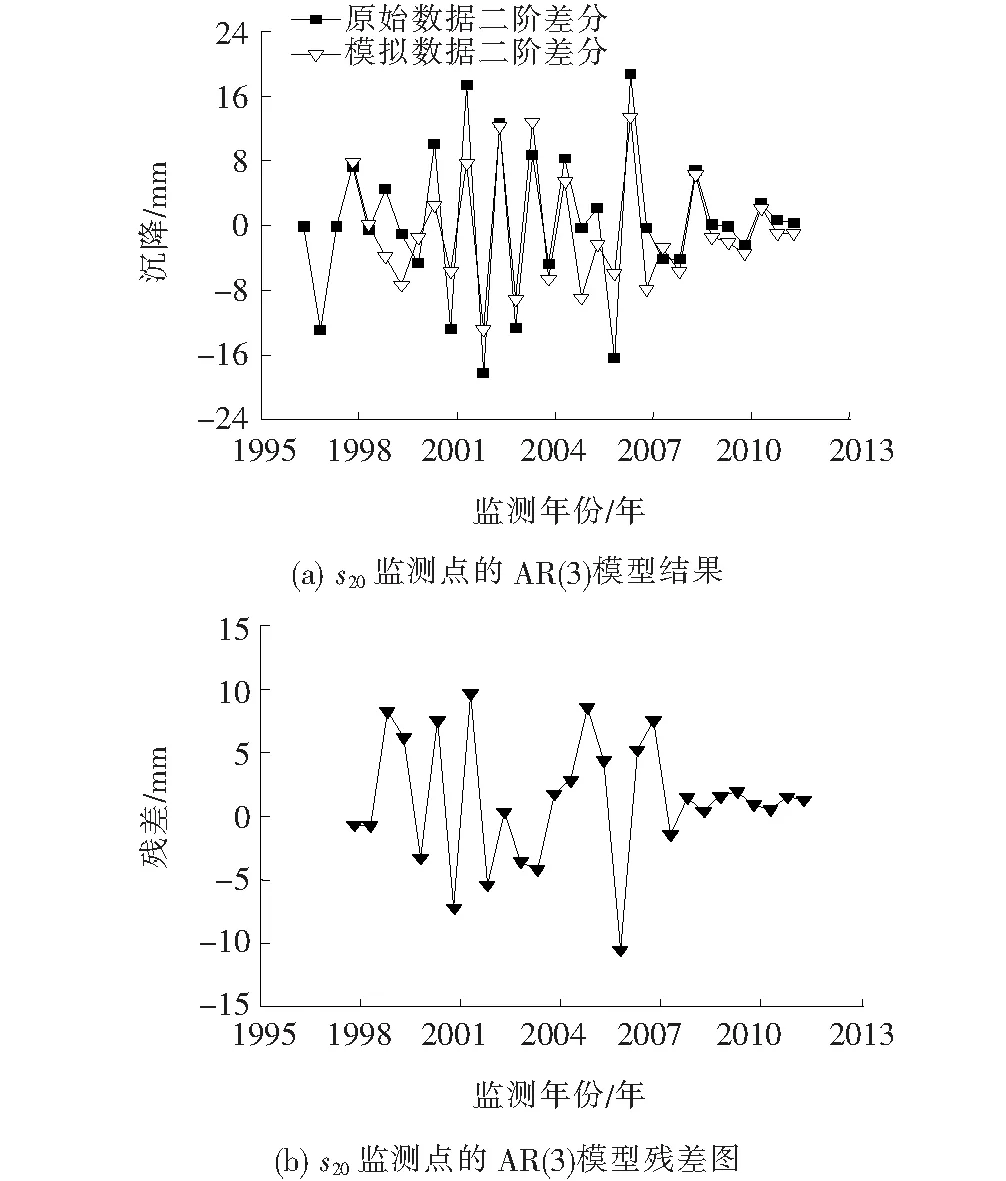
图5 传统时间序列模型分析结果
5.2 结构-向量时间序列
对于向量式时间序列模型,根据式(6)可构造模型:
(19)
采用普通最小二乘法对式(19)的参数估计结果如表1所示。

表1 向量式时间序列模型参数估计
对于结构式,式(10)的C0矩阵,假设监测点的相互作用是一样的,即c12=c21,c13=c31,c23=c32,对矩阵C0进行参数估计的结果为:
(20)
由式(20)可知:相互作用最大的为空间上较近的s20与s21监测点,相关性为0.67,而相互作用最小的为空间上最远的s20与s22监测点,相关性为0.49,基本符合对隧道沉降的认知规律。
该模型的沉降二阶差分预测如图6(a)所示,拟合值为0.850,残差如图6(b)所示,经验证符合均值为0的白噪声序列。
5.3 沉降数据预测
采用结构-向量时间序列对s20监测点进行拟合与预测,由5.2节的二阶差分结果还原回原始沉降,如图7所示,对于沉降数据的拟合值R2为0.985。由结果可以看出:实测数据在2009—2012年呈回弹趋势,模型预测在2014年左右回弹至120 mm。另外,由于时间序列模型属于随机过程的一种,在进行动态预测时,随着预测时间延长,其误差区间也将越大,该模型适用于短期预测。

图6 结构-向量时间序列模型分析结果

图7 沉降数据预测结果
5.4 空间相关性讨论
由于SVAR模型参数较多,需要的样本量会比ARMA模型多,以上述SVAR(3)模型为例,该模型总共有 3 个变量,每个变量的时间序列数据均为 33 条记录,由于采用二阶差分和三阶滞后的原因,每个变量实际对应的方程为28个,总共有结构性方程组84组,考虑滞后阶数为3的模型待估计参数有27个,即1个待估计参数对应着3.1个样本。
同理可以计算得到如果选择SVAR(4)、SVAR(5)、SVAR(6)、SVAR(7)模型,每个评估参数对应的样本分别为 2.3、1.9、1.6和1.3个,待估计参数对应的样本数太少,会出现“过拟合”的现象,估计结果不一定可靠。该节以试验性为目的,研究SAVR(4)和 SVAR(5)模型的结果,如图8所示,图中X轴为公路隧道中的不同监测点,Y轴为结构-向量时间序列系统中其他监测点变量的距离,Z轴则是计算得到的不同距离监测点之间的相互作用。由图8可知:三维网格表现为倾斜的趋势,大体上相互作用大小随着监测点距离加大而不断减少,可认为沉降数据在空间上相距越近其关联性越大。

图8 空间相关性分析结果
6 结论
针对目前对隧道沉降数据的预测方法未考虑数据空间关联性的问题,建立了隧道沉降的自回归滑动平均模型和结构向量时间序列模型,可得如下结论:
(1)介绍自回归模型与滑动平均模型的原理,针对某一隧道沉降数据建立AR(3)模型,该模型对于监测点的平稳沉降二阶差分拟合值R2为0.685。
(2)考虑到ARMA模型每次只能对一条时间序列进行建模,为同时分析多条沉降时间序列和时间序列之间的关联性,结合结构方程方法和时间序列模型,建立结构向量时间序列SVAR(3)模型,该模型对于监测点的平稳沉降二阶差分拟合值R2为0.857以上,原始沉降数据的拟合值R2为0.985以上。
猜你喜欢
公民与法治(2022年10期)2022-12-29
钢管(2022年2期)2022-11-28
煤气与热力(2022年4期)2022-05-23
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
水电站设计(2020年4期)2020-07-16
意林(绘英语)(2018年1期)2018-04-28
大陆桥视野(2016年20期)2016-12-13
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
