腓骨修复颌骨重建手术辅助机器人系统实验验证
2019-06-17 02:17张弘毅王兴涛刘筱菁
中国医疗设备 2019年5期
张弘毅,王兴涛,刘筱菁
1.首都医科大学北京电力医院 口腔科,北京 100073;2.国网信息通信产业集团有限公司 研发中心,北京 102211;3.北京大学口腔医学院·口腔医院 口腔颌面外科,北京 100081
引言
下颌骨是口腔颌面部的重要组成部分,对于维持面部轮廓、咀嚼吞咽、语言表情、以及其他功能具有非常重要的作用。下颌骨缺损是一种最常见的口腔颌面部硬组织缺损疾病[1],如图1所示。
目前,临床中下颌骨缺损重建常用血管化腓骨游离皮瓣[2],手术中医生借助相关医疗器械截除病变骨块,如颌面炎症、颌骨肿瘤、颌面创伤等(图2),病变骨块截除后,下颌骨被分为三段,分别为左侧下颌骨升支骨块、右侧下颌骨升支骨块、以及病变骨块。病变骨块切除后,将患者自身腓骨塑形后植入到下颌骨中替代病变骨块(图3)[3-4]。
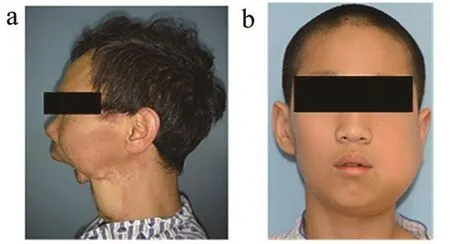
图1 下颌骨缺损患者
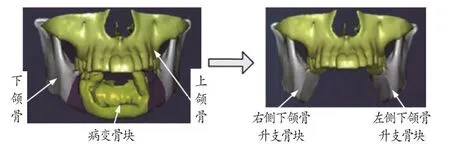
图2 下颌骨病变骨块切除
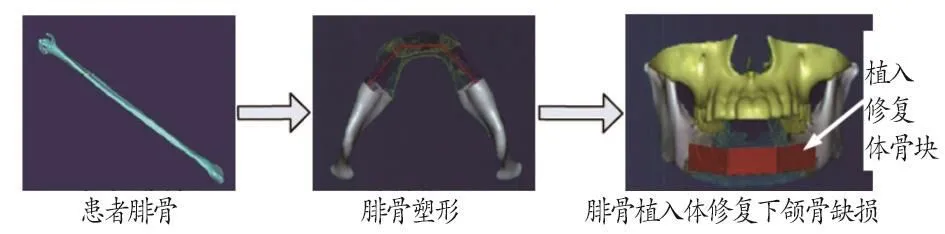
图3 腓骨植入体修复下颌骨缺损
传统颌骨重建手术方法中,医生使用直尺进行测量定位,并使用牙合板辅助定位植入体骨块,由于直尺测量误差大,牙合板加工与定位精度低,且术中更多地依靠医生的经验不断进行判断和改进,因此,传统手术效果较差。计算机辅助手术导航系统给传统颌骨重建手术方法带来了突破性的改进[5]。然而,在计算机辅助手术导航系统指导下对空间点的定位容易,而对空间物体姿态的确定较难,而且导航辅助精确定位后仍需医生徒手把持与操作,人手操作的颤抖和不稳定性导致手术实施时引入人为操作误差,难以将术前精确手术设计在术中准确实施,极大地削弱了计算机辅助手术导航系统的作用,术后的效果仍然差强人意[6]。
本文针对腓骨修复颌骨重建手术需求,研发了一种机器人系统辅助颌骨重建手术,通过机器人辅助医生定位并把持两侧游离升支骨块和中间腓骨植入体骨块,实现骨块精确的空间定位和姿态调整,保证术前手术设计在术中的精确实施,提高手术质量。
1 材料与方法
1.1 颌骨重建手术辅助机器人系统
颌骨重建手术辅助机器人系统主要包括:三臂机器人、光学定位仪、定位支架与定位探针、机器人工作站、力觉交互设备以及手术设计系统[7-8],如图4所示。
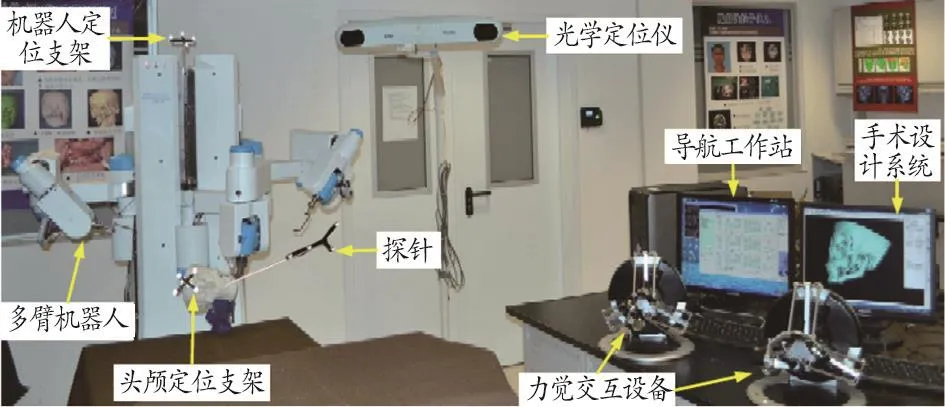
图4 颌骨重建手术辅助机器人系统
(1)三臂机器人。三臂机器人用于在术中定位把持两侧游离升支骨块和中间腓骨植入体骨块,以辅助医生完成颌骨重建手术。
(2)光学定位仪。光学定位仪是红外线导航系统,实时定位和跟踪支架与探针的空间位姿。
(3)定位支架与探针。定位支架与探针可以反射光学定位仪发射的红外线,构建一个坐标系,由光学定位仪接收反射的红外线,获得该坐标系的空间位姿。
(4)力觉交互设备。控制端配置两台力觉交互设备,医生可用双手同时控制三臂机器人中的两个机械臂,并通过控制软件实现被控机械臂的切换。
(5)机器人工作站。机器人工作站运行机器人、光学定位仪以及力觉交互设备等控制软件,实时处理各设备与手术设计系统的数据,实现系统总体控制。
(6)手术设计系统。手术设计系统实现术前手术方案的设计、手术过程的模拟、并提供目标骨块的理想空间位姿数据[9]。
1.2 模型实验
以实际患者的头颅模型作为实验对象,在机器人系统辅助下完成颌骨重建手术,验证机器人系统的精度。实验中,由机器人辅助医生定位把持游离骨块,若机器人自动定位的结果不够理想,或希望在术中修改手术方案,医生可以操作力觉交互设备进行机器人主从控制。该实验的基本流程(图5)如下:① 根据实际患者病历制作颌骨缺损头颅模型,并在头颅模型上置入钛钉,作为标志点,用于空间配准;② 对头颅模型进行CT扫描,将CT数据导入手术设计系统进行三维模型重建,并完成手术设计,模拟腓骨植入体修复颌骨缺损;③ 设计并制作腓骨植入体骨块模型,根据手术设计,在腓骨植入体骨块上置入配准用钛钉,用于游离骨块在机器人系统中的配准;④ 启动机器人系统,并完成机器人系统的空间配准,机器人中间臂牢固夹持腓骨植入体骨块,并完成骨块在机器人系统中的配准;⑤ 根据术前手术设计,规划机器人运动,由机器人辅助定位腓骨植入体骨块,若有必要,可由医生主从控制机器人运动;⑥ 机器人运动完成后,稳固把持骨块,由医生进行骨块之间的连接操作。
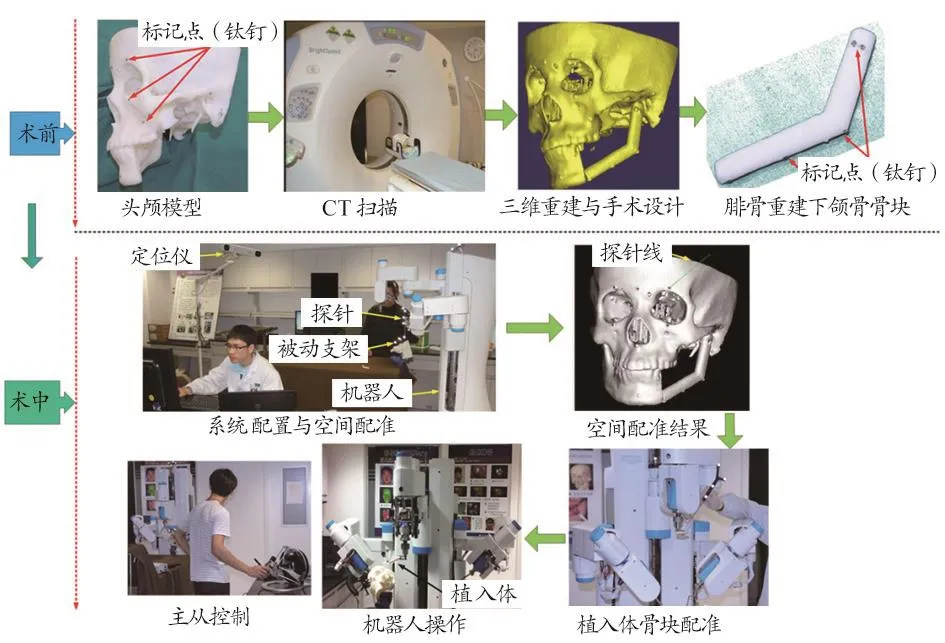
图5 颌骨重建手术机器人系统模型实验
1.3 动物实验
选用8个月至1岁龄的山羊作为实验对象,截除山羊下颌骨的部分骨段,以模拟下颌骨缺损,设计腓骨植入体树脂模型来模拟腓骨重建植入体骨段。实验的基本原理与步骤和模型实验基本相同,根据手术设计截取单侧下颌体部分骨段,形成下颌缺损后(图6a、b),用机器人的左右臂分别固定连接下颌左右近心骨段,使用探针配准夹持骨段在机器人空间中的位姿(图6c),调整中间臂末端被动关节,夹持树脂腓骨段,并完成腓骨段在机器人空间的配准(图6d)。手术完成后解除机器人手臂连接,闭合创口(图6e、f)。
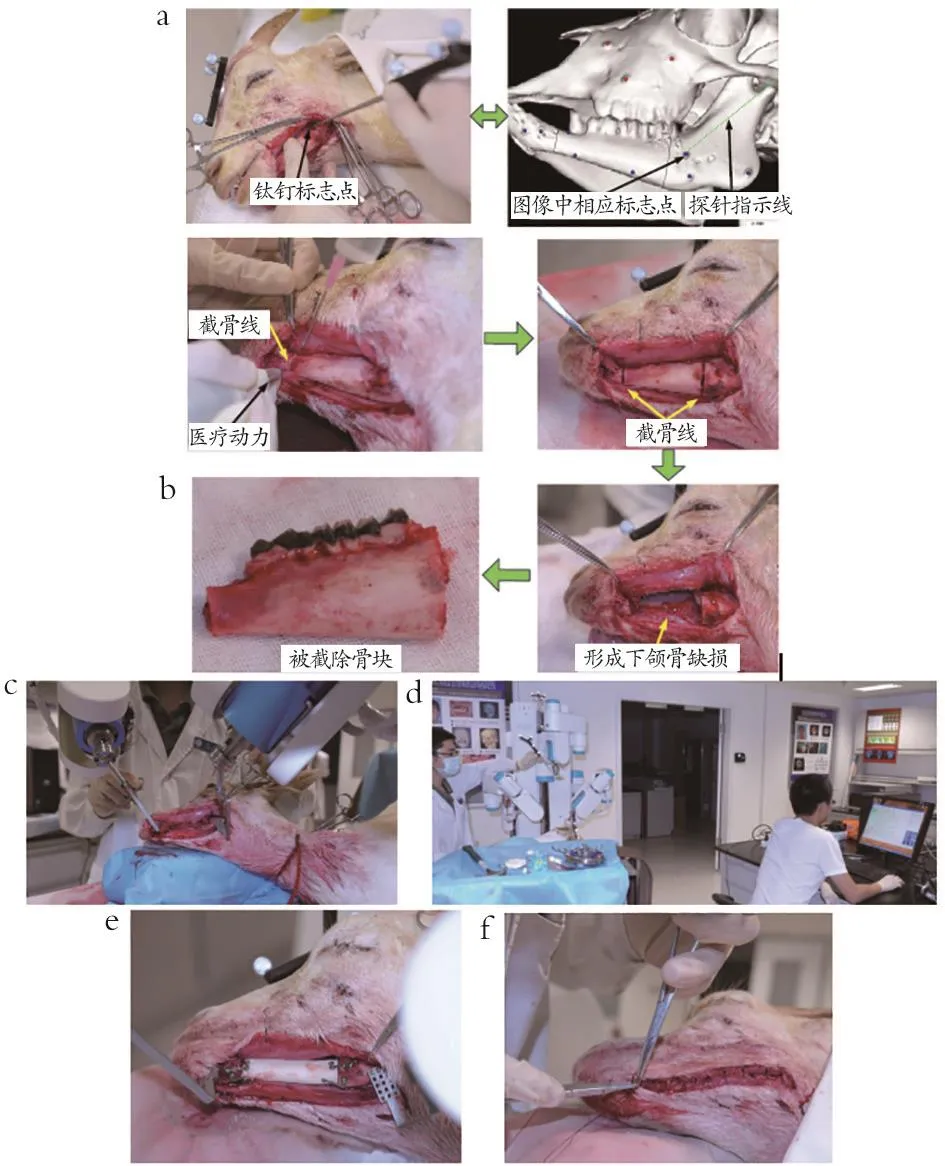
图6 动物实验
2 结果
2.1 模型试验结果
模型实验结果如图7所示,在机器人系统的辅助下,腓骨植入体骨块被定位在术前手术设计的合适位姿处。术中机器人运动平稳,术后将修复后的头颅模型CT扫描后导入软件中进行误差色谱分析,结果如图8所示,平均误差为1.974 mm,可满足颌骨重建手术需求。
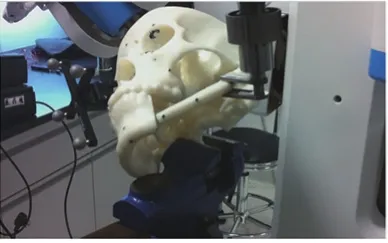
图7 机器人辅助定位操作结果
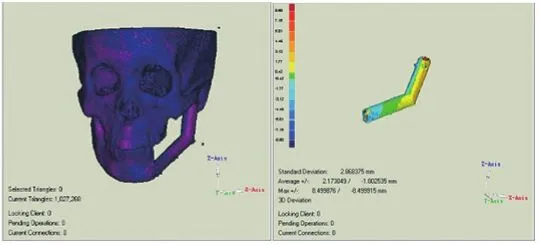
图8 误差色谱分析
2.2 动物试验结果
术后获得山羊头的CT数据,进行头颅三维重建,导入软件对比分析术前和术后的三维图像,评估手术设计方案的实现程度。结果显示腓骨段与术前设计差异平均值是2.175 mm,下颌升支骨段位置变化平均值为1.170 mm,对侧下颌骨段位置变化平均值为2.475 mm,如图9所示。

图9 色谱分析下颌左右近心骨段和修复腓骨段术前和术后的位置差异
3 讨论
口腔颅颌面外科机器人辅助诊疗延伸了医师的视觉范围和可操作空间,可实现精准治疗、减少创伤,提高医生的操作精度和手术能力,开拓了微创诊疗的新发展方向[10-12]。1998年,德国Lueth等[13]提出了第一个颌面外科手术机器人系统OTTO,用于插入非柔性导管,也可用于在颅骨中植入骨固定物。RoboPoint机器人系统于2003年研制成功,辅助开展牙齿植入物插入操作[14]。海德堡大学研发了应用于颅颌面外科截骨术的机器人系统RobaCKa,该机器人系统已在羊尸体头颅上进行了种植床的自动铣削测试[15]。本文研发的颌骨重建手术辅助机器人系统,在一定程度上弥补了计算机辅助导航系统所存在的不足,由机器人辅助医生进行定位与把持操作,实现骨块的空间精确定位和姿态调整,从而保证术前手术设计在术中的精确实施。
4 结论
模型实验和动物实验结果表明,机器人能够完成下颌骨重建手术中游离骨块的植入、定位及稳固把持。术中机器臂运行平稳,配合主从控制,可正确定位骨段的位置和姿态。动物实验结果表明,下颌骨修复后形态基本不变,植入腓骨的位置误差可满足手术需求,然而该机器人系统仍处于试验阶段,距离临床应用还有诸多技术、政策、成本等难点需要突破[16-17]。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
口腔颌面外科杂志(2021年4期)2021-09-04
昆明医科大学学报(2021年1期)2021-02-07
中华养生保健(2020年4期)2020-11-16
临床外科杂志(2020年8期)2020-09-15
口腔医学(2020年8期)2020-09-08
浙江临床医学(2019年7期)2019-09-02
中国医学影像技术(2019年8期)2019-08-24
中国内镜杂志(2019年6期)2019-07-06
中华肩肘外科电子杂志(2018年1期)2018-04-27