离子束刻蚀机电控系统设计许钊
2019-06-24 06:23薛鹏
科技创新与应用 2019年13期
薛鹏

摘 要:运动控制系统是实现离子束刻蚀机控制算法和轨迹拟合算法的硬件基础,因此需要在传动运动控制系统上,进行进一步的研究,以满足离子束刻蚀机刻蚀闪耀曲面光栅的要求,文章按照离子束刻蚀机运动控制系统的功能要求设计了工作平台的电控系统,首先介绍了电控系统的结构和功能模块布置,之后分别对电控系统的四个主要功能模块的软件和硬件电路进行设计,分别为:供电模块、真空获得模块、运动控制模块、通讯模块。为实现离子束刻蚀机控制算法和轨迹拟合算法提供了实际实验平台基础。
关键词:步进电机;硬件设计;运动控制
中图分类号:TP273 文献标志码:A 文章编号:2095-2945(2019)13-0095-02
Abstract: The motion control system is the hardware basis to realize the control algorithm and trajectory fitting algorithm of ion beam etching machine. therefore, further research needs to be carried out on the transmission motion control system to meet the requirements of ion beam etching machine etching blazed surface gratings. In this paper, the functional requirements of the motion control system of ion beam etching machine are studied. the electronic control system of the working platform is designed. Firstly, the structure and functional module arrangement of the electronic control system are introduced. Then, the software and hardware circuits of the four main functional modules of the electronic control system are designed, which are: power supply module, vacuum acquisition module, motion control module, communication module. It provides a practical experimental platform for the realization of ion beam etching machine control algorithm and trajectory fitting algorithm.
Keywords: stepping motor; hardware design; motion control
1 供电模块
由于整个系统中有众多电子设备同时工作,根据以往经验各个设备的上电应严格按照一定的先后顺序进行,包括真空泵组的工作电源及控制系统工作台需要的工作电压(+5V,+24V等),以避免因为上电顺序的错误造成系统工作不稳定等潜在的危险情况出现。
运行模式的切换主要是针对真空获得部分。对于真空获得其存在两种运行模式,即手动模式和自动模式。在自动模式下真空泵组根据程序设定好的条件运行,无需操作人员进行任何操作即可以形成及保持真空。手动模式操作情况下,真空获得的主控单元(PLC模块)不起作用,真空的形成和保持完全由操作人员在1号机柜提供的手动控制模版上进行,其各种状态信息的反馈完全由操场人员完成。
2 真空获得模块
真空获得主要是电控系统与真空泵组的电气控制接口及真空形成保持流程的执行单元。该部分主要介绍真空形成保持的流程,控制模块与真空泵组的电气接口设计。
从实际应用情况出发,要求真空联锁的控制实现以下几个目标:(1)可以严格按照真空联锁的流程完成真空的
形成和保持。(2)当系统的主控软件及其它部分停止工作时,真空联锁控制仍能可靠安全的保证系统真空。(3)可以在自动和手动两种模式下切换。
3 運动控制模块
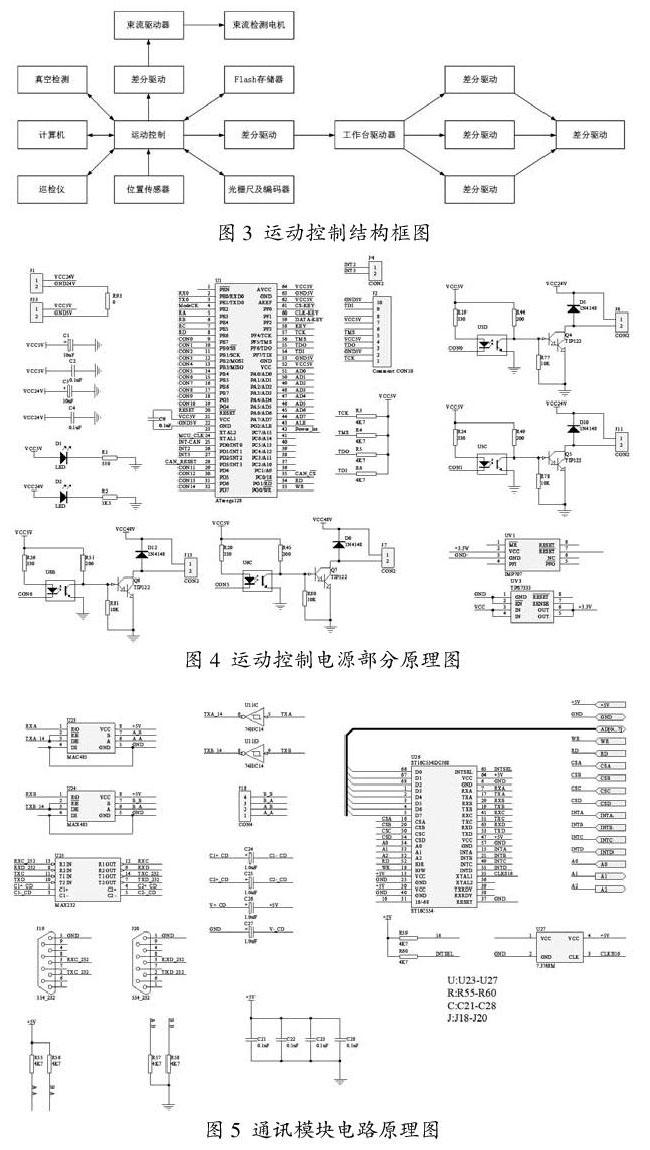
运动控制部分主要是完成样品工作台的运动拟合以及束流检测电机的控制;在进行工作台运动导轨误差修正补偿时可以采集光栅尺及编码器输出信号;可以存储应用软件生成的运动轨迹补偿数据;通过串口与在真空室内的PLC模块通讯采集工作台及束流检测位置开关的状态。
将详细介绍运动控制各个部分硬件设计的细节。其结构框图如图3所示。
对于两种电机驱动器的控制接口(Dir+,Dir-,Pulse+,Pulse-,Enable+,Enable-)支持TTL电平输入;光栅尺编码器工作电源为5V,主控芯片及其外围芯片工作电压包括+5V/3.3V两个电源等级。因此电源需要提供5V/5A的输出能力,对于3.3V/2A通过电平转换芯片提供,其具体型号为TPS7333,输入电压为5V。运动控制系统的电源分为两部分:+48V/22A;+24V/2A,5V/5A。如图4所示。
4 数据通讯模块
数据通讯以RS232或RS485为基础构建,由于RS232及RS485之间转换很容易实现,因此不硬性规定各部分所采用的方式,具体根据情况增加RS232/485转换器。动作命令为一个节点向另一节点的某个部件发出动作命令,接收节点接收并执行命令后向命令发出节点以状态命令格式返回动作执行结果(图5)。
5 实际调试实验
为了使实验结果准确,本节设计了两种不同预定转速下的传统PID控制和模糊PID控制对比实验。实验方式如下:步进电机转速由主控芯片ATmega128L通过调速器获取,并通过RS232/RS485串口传输到电脑记录实验数据,并运用Matlab进行数据的处理。
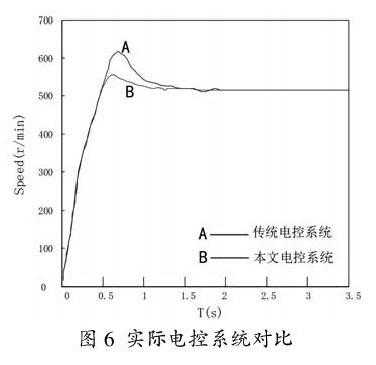
如图6,预设步进电机转速为500转/分钟的传统电控系统和本文电控系统控制下的实际转速曲线,图中A转速曲线为传统电控系统,其具有0.8s左右的上升时间,其转速超调至620转/分钟,超调量达到了20%,并且在2s实现了转速稳定。图中B转速曲线为本文电控系统,本文电控系统的转速上升时间约为0.5s,转速超调至530转/分钟,超调量约为6%,并且在1.2s实现了转速稳定。
6 结束语
笔者设计了离子束刻蚀机电控系统,首先介绍了电控系统的结构和功能模块布置,之后分别对电控系统的四个主要功能模块的软件和硬件电路进行设计,为实现离子束刻蚀轨迹拟合算法提供了硬件支持,并进行了实际状态下的控制实验对比,验证了此设计能够满足离子束刻蚀机的运动精度求。
参考文献:
[1]刘春来,张东,史宏亮.基于PXI总线的电路板级功能测试系统[J].电子测试,2013(05).
[2]李月,陈天华.PCB功能测试系统的设计与实现[J].制造业自动化,2012(17).
[3]包建华.印制电路板图件识别研究中的图像预处理实现[J].电子工程师,2006(08).
[4]范云龙.PLC与变频器实现传送带同步控制[J].新型工业化,2017(02).
[5]吴平峰,代宣军.PCB测试技术的介绍[J].现代机械,2009(04).
猜你喜欢
科学家(2016年3期)2016-12-30
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年27期)2016-12-15
科技视界(2016年24期)2016-10-11
企业导报(2015年15期)2016-01-18
现代电子技术(2014年10期)2014-07-19