基于VIRE的改进室内定位算法研究*
2019-06-25 06:02罗文浩
通信技术 2019年6期
高 进,张 欣,纪 磊,罗文浩
(贵州大学 大数据与信息工程学院,贵州 贵阳 550025)
0 引 言
随着社会的发展,学校安全工作越来越引起各级领导和社会的关注,儿童和少年能否安全健康成才关系到千家万户的幸福,关系到广大群众的根本利益,关系到社会的稳定,因此,对于中小学校园安全的建设就显得非常重要,一个平安、和谐的校园环境对于学生的健康成长和良好发展具有重要意义。
本文结合射频识别技术(Radio Frequency Identification,RFID),建立校园安全管理系统,对学生位置进行实时室内定位,以确保学生的人身安全,学校可以对学生高效管理。因此定位的精准度成为该系统的首要任务,本文将对传统的定位算法VIRE完成改进,提高定位的准确度。
1 RFID室内定位技术
RFID技术产生于20世纪40年代,最早应用于二战中,用来实现敌我识别系统[1]。经过七十多年的发展,RFID技术广泛应用于各个领域,本文将介绍其在室内定位方面的应用。RFID定位有四种常用技术:到达时间(Time Of Arrival,TOA),到达时间差(Time Difference Of Arrival,TDOA),到达角(Angle Of Arrival,AOA)和基于接收的信号强度指示(Received Signal Strength Indication,RSSI)的定位技术。前三种定位技术成本较高,而基于RSSI的定位技术成本低,受室内定位的影响小,且不需要附加的硬件设备。考虑到室内定位技术的研究水平和RFID技术的非接触和非视距等优势,RSSI定位技术成为了基于RFID室内定位一种最广泛的应用技术[2]。
基于RSSI值的定位基于传输路径中的信号损失来估计距离。在实际传输中,信号会受到温度湿度、室内障碍物和其他外部因素的影响,这将使RSSI值的变化与衰减模型呈现非线性关系。由于各种室内干扰因素的影响,尤其是参考标签之间相互影响发生多径效应,信号衰减的计算受到很大的影响[3]。因此,逐步推导出二种基于RSSI值的定位技术:一种是基于传播模型方法;二是一种基于场景分析方法。
室内场景分析法要求在场景内部设置参考标签。定位时,阅读器接收RSSI值,利用“最近邻距离”权值思想,匹配并将其与场景内参考标签值相匹配,并通过加权计算出标签的实际位置。与传播模型相比较,场景分析法对外界因素的干扰具有很强的抑制作用,广泛应用于室内定位。
RFID室内定位技术是目前使用最为广泛的室内定位系统之一。该系统的结构主要有三部分构成,分别是电子标签、阅读器和应用系统软件[4]。RFID定位技术是一种非接触式的定位技术,在不需要人工的干预下可以自动识别并定位。RFID阅读器与标签之间通过特定的频率和相关的协议进行通信,并将服务器的信息写入到标签中或者是将收到的信息发送给定位服务器。RSSI算法是根据测得目标的强度,然后用模拟信号路径耗损经验模型来计算目标的距离,最后利用定位算法测得待定标签的位置。目前大多数基于RFID的定位系统都是用RSSI算法来实现定位。
RSSI损耗模型公式:

其中p(d)是经过距离d之后的路径损耗,其单位为功率单位dB;d0为d=0.1 m时的参考距离,该值为实际的测量值;n为路径损耗因子,是由路径长度和损耗之间的比例算出,收到环境中物品的形状和所使用的材料影响,一般取值范围为1~6,Xδ是标准差为δ随机变量,取值范围一般为4~10。
本文主要讨论了二种实时室内定位分析算法:LANDMARK(基于动态有源RFID校准的位置识别)算法和VIRE算法。
1.1 LANDMARK算法
LANDMARK定位系统是由电子标签、阅读器和应用系统软件三部分构成,通过引入参考标签的概念,尽可能的减少了外部环境对定位精度的影响,提高了定位精度并大大减少了对室内定位系统的投资[5]。算法通过将部分标签设置为定位的区域中的参考点,算法接收RFID标签和参考标签之间的RSSI值差异,并根据阅读器和参考标签之间的差异选择出最接近的那些标签。然后通过加权计算出“最近邻标签”的位置信息。系统的定位模型如图1所示。
如图1所示,为LANDMARK定位图,首先定义参考标签的信号强度的矢量为SR=(SR1,SR2…SR3),SR1为阅读器读取的参考标签i的信号强度值,因此可以得到定位标签信号强度的矢量矩阵为ST=(ST1,ST2…ST3),其中 STi表示待定标签在读取器上的i上的RSSI值。
测得待定标签和参考标签之间的欧式距离:

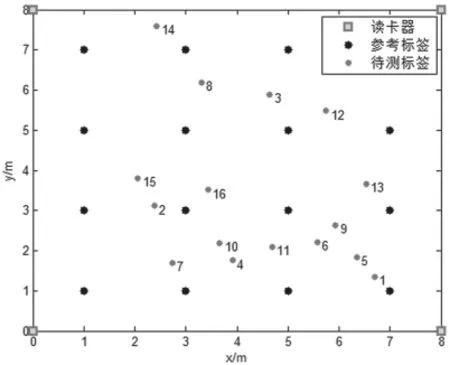
图1 LANDMARK定位图
E的值越小表示参考标签与待测标签的实际距离越小,反之,E的值越大,则离得越远。下一步在求得的Ei值中,选出在一定阈值范围内的k个点,这k个参考标签与待测标签最为接近的点,从而可以推算出待测标签的位置信息。位置算法如下:

其中,wl为第l个待测标签物理实际距离最接近的一个权值,权值wl可以有经验公式,如下:
其中,(x-x0)为参考标签的坐标 (x,y)为待测标签的坐标位置。
1.2 VIRE算法
从上一节我们可以看出,LANDMARK算法的位置精度与参考标签的数量密切相关。然而,参考标签的增加不仅需要大量成本的输入,而且还容易导致标签之间的信号干扰,这将导致定位精度的降低。因此提出一种基于LANDMARK算法的虚拟标签进行定位的VIRE算法。
VIRE定位算法采用了LANDMARK算法的基本原理,在两个方面进行了改进:一是虚拟引用标签的引入[6]。通过在固定参考标签之间加入虚拟标签,虚拟标签获得与固定参考标签相同的效果,并且过多的数量也不会导致信号交互。其次将相邻映射的概念引入到VIRE定位算法中,通过比较每个阅读器识别的图,消除了小概率的位置,大大提高了定位精度。
在VIRE系统中,在每4个固定参考标签之间设置5个虚拟参考标签,则虚拟参考标签总数为52-4=21个个。虚拟标签分布图如图2所示。
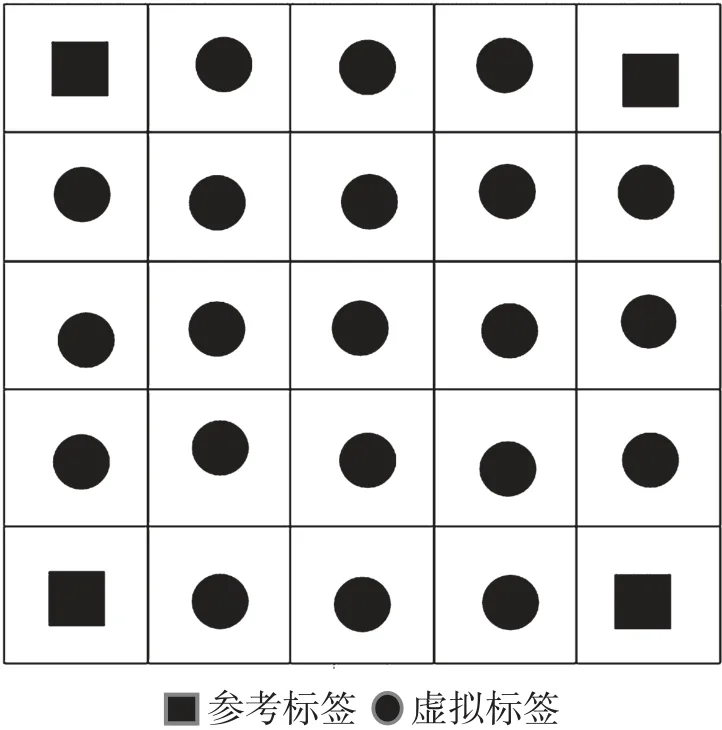
图2 VIRE虚拟标签分布
固定参考标签的坐标值和信号强度值(RSSI)是确定值,并且虚拟标签之间的距离也是确定值。因此,可以通过线性插值公式得到固定位置处的虚拟参考标签的信号强度值(RSSI)。虚拟标签位置的计算如下:
其 中,Sk(Ti,j)表 示 第 k 个 阅 读 器 在 (i, j)坐 标位置上的虚拟标签RSSI强度值。a=[i/n],b=[ j/n],0≤p=i%n≤n-1,0≤q=j%n≤n-1
由上述可知,RFID定位系统中参考标签的设定对定位的精确度起着关键性的作用,因此RFID定位系统的精度也受到虚拟标签的多少影响,所以我们还需得出虚拟标签的最佳影响因子。设置一个影响因子W2i表示虚拟参考标签的多少和密度对定位精度的影响;设置W1i表示每个最近邻参考标签的权值,那么这些虚拟标签的影响计算公式为:
其中,na表示模糊地图交集后取出的最近邻参考标签的总数,nci表示最近邻标签组成的最小邻近区域中所对应连接区域数,得到最近邻参考标签的权重:
2 改进的VIRE定位算法
根据经典的LANDMARK算法,定位精度与参考标签的数量密切相关,当标签数量达到一定量时,位置精度可以保持在高水平。然而,参考标签的数量增加不仅需要大量成本的输入,而且还容易导致标签的信号干扰,这导致定位精度的降低。
基于LANDMARK算法,提出改进的VIRE定位算法,该算法利用虚拟标签和相邻区域进行定位。本文将从“相邻地图优化”方法进一步优化VIRE算法,这将最小化待定标签的计算值与实际位置的误差,命名为B-VIRE算法。
当信号在实际环境中传输时存在多径效应[7]。阅读器接收的标签的实际RSSI值与通过信号衰落公式[8]计算的理想值之间存在很大误差,因此需要选择合适的RSSI阈值排除小概率位置,如果阈值设置过小,将排除要定位的标签实际位置;因此,需要适当的增加阈值,然而,太大的阈值范围将导致太多的伪邻接区域,导致定位精度大大降低,特别是那些位置与要定位的标签的实际位置大大偏离的伪邻接区域。
目前我们已经有了一种方法可以在排除小概率的位置后消除“伪邻接区域”。该方法的工作流程是选择相邻区域中的区域,采取该区域的参考标签作为圆心。在半径R处绘制圆圈。相邻的数量园内的区域是Ni,遍历相邻区域的所有区域。以最大Ni和R为半径的区域的参考标签为中心的圆为最终的“相邻区域”。改进的示意图如图3所示。
改革开放40年的社会主义法治建设,确立了国家发展中带有根本性、全局性、稳定性和长期性的重大制度,夯实了立国兴邦、长治久安的法治根基,从制度上法律上确保党对一切工作的领导,确保国家一切权力牢牢掌握在人民手中,确保国家主权、统一和民族团结,确保坚持独立自主的和平外交政策、走和平发展道路,有力推动和保障了我国社会主义经济、政治、文化、社会和生态文明建设,为中国特色社会主义兴旺发达、永不变色提供了坚实法治保障。
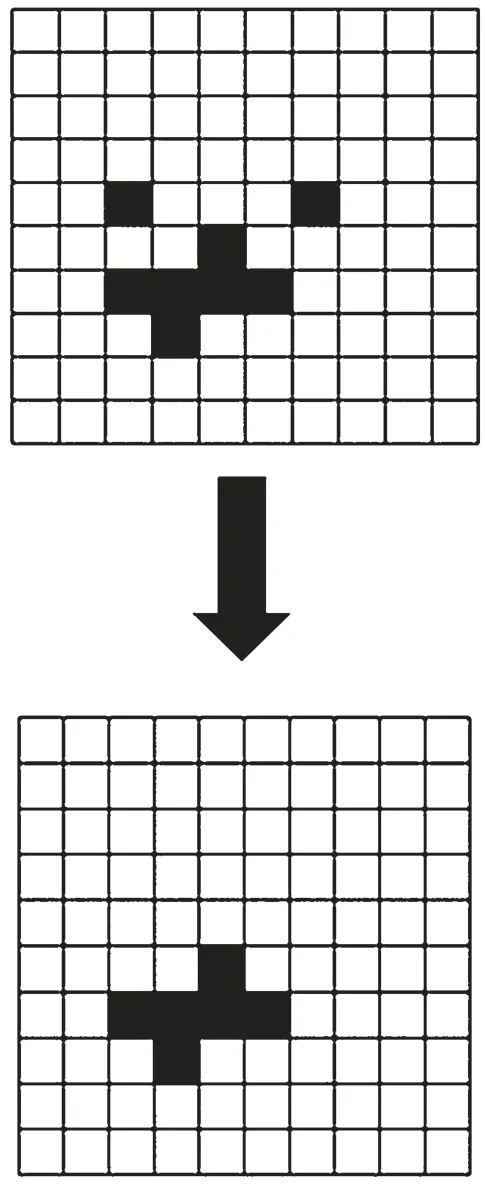
图3 改进的示意图
3 B-VIRE实验仿真
我们设定与VIRE相同环境,路径损耗n设置为n=2,参考标签设置为4×4,虚拟参考标签数设定为N=5时,使用MATLAB软件进行仿真,得到图4。
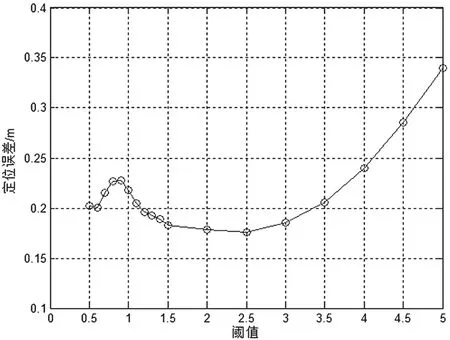
图4 阈值对定位误差的影响
由仿真结果可知当阈值设定为th=2的时候,误差最低为0.171 3 m,阈值过小将无法先建立准确的待测标签交集,导致无法定位,阈值过大可能引入干扰虚拟参考标签,导致“伪邻接区域”。VIRE系统定位图见图5。因此我们将阈值设定为2,带入B-VIRE定位系统中,得到如下的仿真结果,见图6。
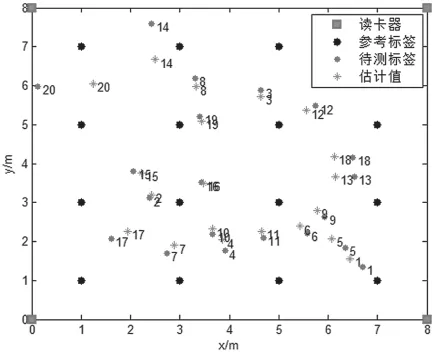
图5 VIRE系统定位图
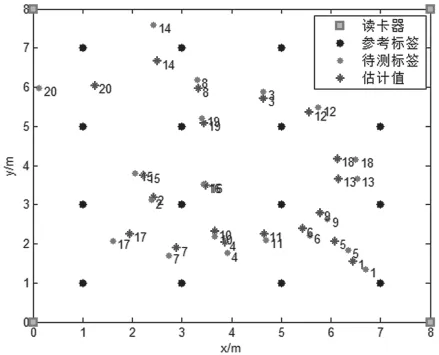
图6 B-VIRE定位结果
由图7和表1可知,当阈值设定为th=2时,采用和VIRE同样的定位环境,B-VIRE定位的精度得到显著提高,尤其是标签1号,标签8号,标签14号和标签20号。定位误差最低为8号标签,B-VIRE定位误差为0.031 4 m,VIRE定位误差为0.222 m,较VIRE定位算法误差降低了85.86%,从定位结果上来看,B-VIRE定位平均误差为0.206 27 m,而VIRE定位平均误差为0.308 65 m,待测标签的误差有显著的降低。
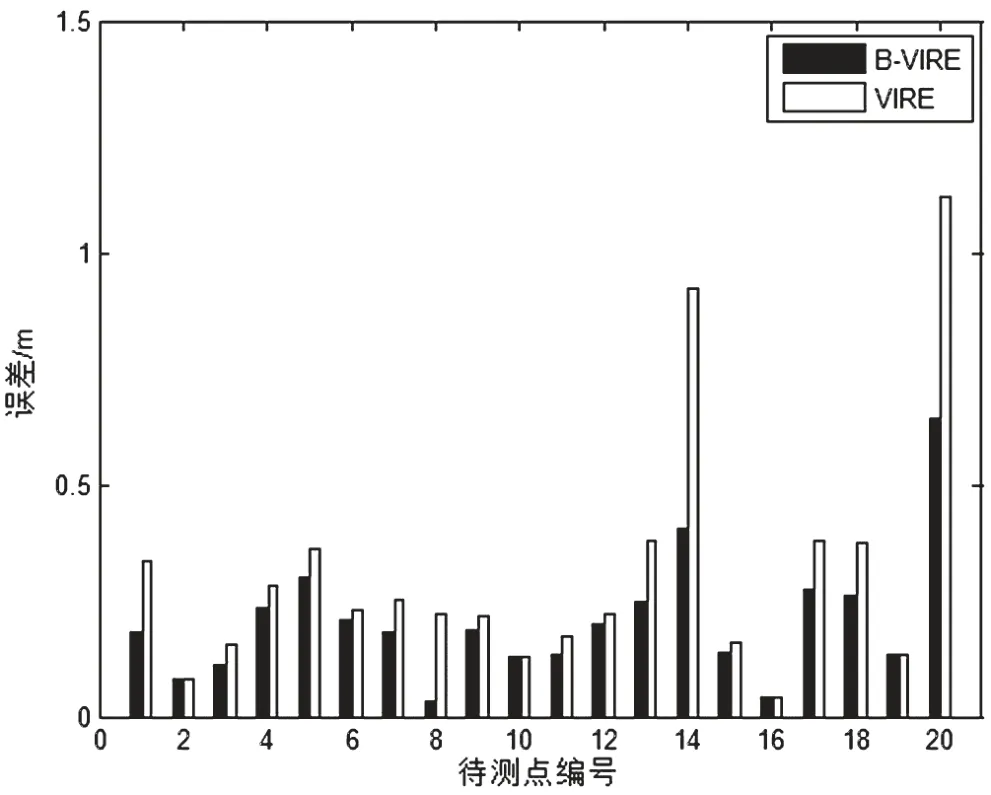
图7 各待测点定位误差
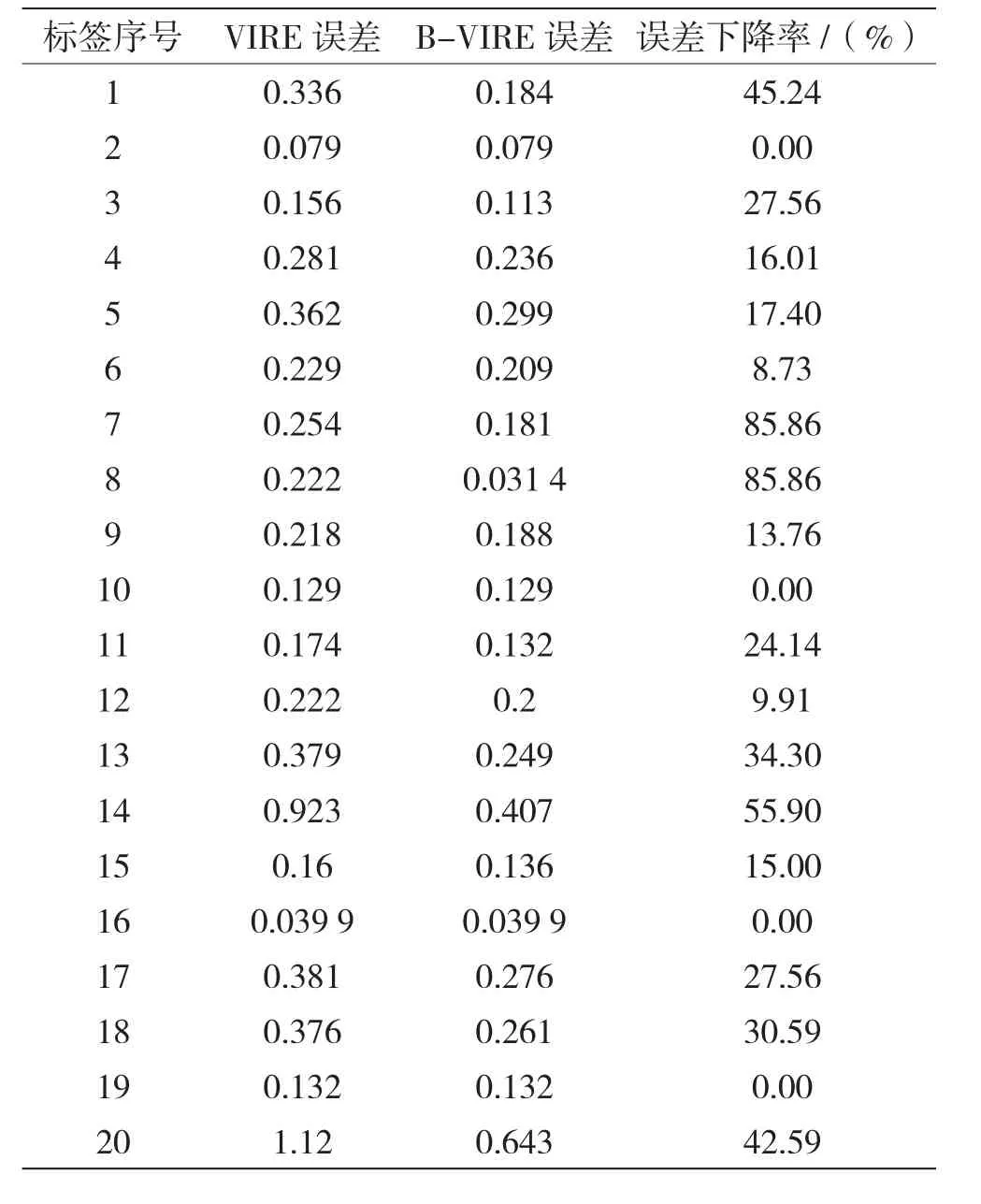
表1 VIRE和B-VIRE二十个待测标签的定位误差
4 结 语
本文阐述了RFID室内定位算法的三种定位算法,给出了RFID定位算法的基础理论,是通过标签的信号强度值强弱判断出最近邻标签,利用最近邻算法得到待测标签坐标。然后找出传统的LANDMARK算法和VIRE算法的缺陷,并对其进行改进,最后提出一种基于VIRE定位算法的B-VIRE算法,通过相邻地图优化法,提高定位精度。
通过最终的MATLAB仿真,我们对算法改进后的精度进行了比较,B-VIRE定位算法显著的提高了待测标签的定位精度,改善了传统的定位算法,仿真结果表明,本文提出的改进VIRE定位算法大大提高了定位待测标签的估计位置准确性。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
机械设计与制造(2022年5期)2022-05-19
中成药(2022年1期)2022-01-27
英语世界(2020年10期)2020-11-06
英语世界(2020年2期)2020-03-08
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
计算机应用(2017年8期)2017-10-21
雷达学报(2017年1期)2017-05-17