燃料电池汽车动力系统仿真分析及控制策略研究
2019-06-25 01:37刘雨晖陈申龙张志猛
数字制造科学 2019年2期
江 玥,李 涛,张 哲,3,刘雨晖,陈申龙,张志猛
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070;3.东风日产乘用车公司 技术中心,广东 广州 510800)
为了解决不可再生资源短缺以及日益严重的环境污染问题,寻找清洁能源替代现有能源是未来发展的大趋势[1]。中国、美国、欧盟、德国、日本都出台了相关政策大力推进新能源汽车的研发[2-5]。用单一的燃料电池作为汽车动力源有着明显的缺陷,燃料电池只适用于稳态负载,当负载变化过快时,燃料电池无法及时响应。为了解决这个问题,燃料电池汽车的动力源采用混合动力的形式,如“燃料电池+蓄电池”、“燃料电池+超级电容”等,蓄电池和超级电容能适应车辆需求功率的频繁变动[6],响应速度快,能弥补单一燃料电池作为汽车动力源的缺陷。
1 燃料电池汽车动力系统
1.1 燃料电池汽车动力系统组成
燃料电池动力系统主要由驱动电机、DC/DC变换器、辅助能源、变速器、燃料电池及其管理系统等组成。混合动力源的形式主要有“燃料电池+蓄电池”、“燃料电池+超级电容”、“燃料电池+蓄电池+超级电容”3种。超级电容充电快,能够大电流放电,但其存储的能量有限,只可以提供大约1 min的峰值功率[7]。因此笔者不采用超级电容作为燃料电池客车的辅助能源。而采用“燃料电池+蓄电池”的混合动力形式。
燃料电池侧DC/DC变换器结构如图1所示,燃料电池的输出经单向DC/DC变换器后与蓄电池的输出并联为负载供电。因此可通过控制DC/DC变换器的输出功率直接调节燃料电池的输出,实现能量管理,可对燃料电池进行有效的保护。该方案混合电源的体积和质量比蓄电池侧DC/DC变换器小,电压波动更小。

图1 燃料电池侧DC/DC变换器结构
1.2 燃料电池和蓄电池特性
燃料电池能量转化时直接将化学能转化为电能,理论上可以达到很高的效率,实际上效率能达到50%~70%,是传统热机的2~3倍[8]。
理论上燃料电池效率为:
(1)
式中:PS为燃料电池输出功率;Fin为对应PS的理论耗氢量;qH2为理论耗氢量;HV为常数。
推导得单电池的理论效率为:
η=V/1.229
(2)
式中,V为单体电池电压。
在实际工作过程中电堆的工作效率为:
(3)
式中:LHV为氢气低热值,其值为1.2×105kJ/kg;Hf为耗氢量。
图2为燃料电池的输出功率-效率曲线图,主要分为低效率工作区、高效工作区、大功率工作区、超负荷工作区。改进的模糊控制策略根据蓄电池SOC(state of charge)值设置了燃料电池最低输出功率,以提高整个燃料电池客车行程中燃料电池的功率输出占比。
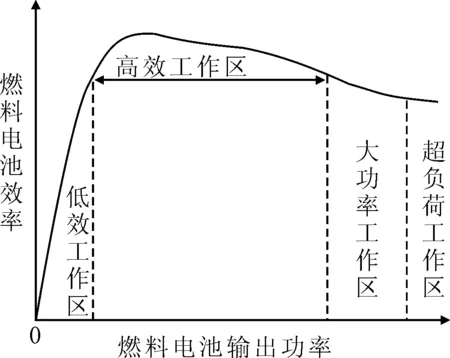
图2 燃料电池效率曲线图
蓄电池可以适应频繁变载、快速的充放电,能够弥补燃料电池作为燃料电池客车单元能量源的不足之处。在蓄电池工作过程中,要避免过充过放,保护蓄电池的安全。
某锂离子电池在不同温度下(0℃、10℃、25℃、40℃)C/3倍率的放电曲线如图3所示。

图3 C/3倍率下某锂离子电池放电曲线
从图3可知,不同温度下锂离子电池放电趋势基本保持一致,当SOC<0.2时,输出电压会很快达到截止电压,当0.2 根据燃料电池客车特定工况下能量和动力性的需求,确定驱动电机、蓄电池、燃料电池、DC/DC变换器的相关参数和型号。 根据市面上的车型相关数据和实验室前期开发的燃料电池客车的相关性能指标以及相关国标,选取的整车尺寸与质量参数如表1所示。 表1 整车尺寸与质量参数 判断燃料电池客车是否能达到CCBC工况要求的重要指标为汽车能否达到工况要求最高车速及能否完成工况要求的加速过程。目标车辆的整车动力经济性目标参数如表2所示。 表2 整车动力性经济性目标参数 驱动桥的设计需满足:选择合适的驱动桥速比,保证最大爬坡度达到18%以上以及0~30 km/h的加速时间小于9 s。根据提出的要求,现有速比为6.143和7.400两种速比驱动桥可供选择。 根据已选电机参数,通过MATLAB/Simulink对整车加速性能进行校核。 整车满载(16 500 kg)、驱动桥速比分别为6.143和7.4时,0~30 km/h和0~50 km/h加速性能仿真结果如表3所示。 表3 整车满载加速性能仿真结果 燃料电池客车满载时驱动桥速比分别为6.143和7.400时从0加速到50 km/h的速度-时间曲线分别如图4和图5所示。 图4 驱动桥速比为6.143时的加速曲线图 图5 驱动桥速比为7.400时的加速曲线图 从图4和图5可知,传动比为6.143、7.400时,都能满足0~30 km/h加速时间小于9 s的要求。在ADVISOR仿真中将给出爬坡度仿真结果。 现对最高车速进行校核,最高车速与电机转速之间满足式(4)。 (4) 式中:n为驱动电机转速;i0为驱动桥速比,取6.143和7.400;umax为最高车速,取69 km/h;r为车轮滚动半径,取0.467 m。 当驱动桥速比为6.143,最高车速对应电机转速为2 407.53 r/min;驱动桥速比为7.400,最高车速对应电机转速为2 900.16 r/min。根据设计要求,驱动电机最高转速应该达到2 600 r/min。因此驱动桥速比7.400不能满足最高车速要求。经对采用驱动桥速比6.143时的整车最大爬坡度和加速性能校核,驱动桥速比6.143能够满足动力性要求。 燃料电池客车在正常行驶过程中,燃料电池为主要动力来源,蓄电池起到辅助供能的作用。因此燃料电池模糊控制策略的制定主要从以下三方面考虑:①减小燃料电池输出功率的波动幅度和燃料电池发动机的启停次数,以延缓燃料电池寿命的衰减;②为保证锂离子电池的安全工作,防止其过充过放,且制动时锂离子电池能够回收制动能量,保证电池SOC值在一个合适的区间内;③尽可能提高燃料电池和锂电池的工作效率。 模糊控制器一共由4部分组成,分别是输入量模糊化、规则库的制定、模糊推理及接口清晰化。笔者基于ADVISOR进行二次开发,采用了ASVISOR顶层模块中燃料电池控制策略中的输入及输出。其中输入为锂离子电池的SOC值及总线需求功率Pb,输出为燃料电池输出功率Pf。模糊控制器机理如图6所示。 图6 模糊控制器机理图 (1)输入量的模糊化。将真实世界中的数值转化为模糊集的形式输入模糊控制器,然后经模糊规则的约束转化为所需要的模糊集,再将这个模糊集清晰化,变成真实世界的数。这就是整个模糊推理的过程[9]。 在模糊工具箱中,有Mamdani型模糊推理系统和Sugeno型模糊推理系统,Mamdani型模糊推理方法是最见的,运用学习比较简单,Sugeno型模糊推理的隶属度函数只能是线性的或者是常量,故采用Mamdani型模糊推理的方式。如图7所示,整个模糊控制器采用的双输入,单输出的模式。两个输入分别是锂电池的SOC值,总线需求功率Pb,输出是燃料电池输出功率Pf。 图7 模糊推理方法 笔者研究的燃料电池客车采用锂电池高效工作区间的SOC在[0.3,0.9],在工况一定的情况下,总线需求功率的曲线是不变的。 (2)模糊规则确定。模糊规则就是if-then规则又称模糊隐含或模糊条件语句。If-then规则语句模式如下: IfxisAthenyisB. 其中,A是模糊规则输入,可以是一个或者是多个。B是模糊规则的输出,也可以是一个或多个[10]。根据以往的仿真实验可知: ①锂电池SOC值低时,总线需求功率Pb高时,燃料电池输出功率Pf高。 ②锂电池SOC值高时,总线需求功率Pb低时,燃料电池输出功率Pf低。 给定蓄电池SOC值,总线需求功率Pb,则能触发对应的规则,得到的功率分配如图8所示。 图8 模糊控制下燃料电池输出功率图 燃料电池混合动力城市客车的整车动力系统参数如表4所示。将相关的部件数据输入到对应部件的M文件中,接着将修改后的M文件导出,然后在功率跟随策略下进行仿真。再将传统模糊控制策略导入到ADVISOR顶层模块中进行仿真。 表4 整车动力系统关键部件参数 燃料电池客车在CCBC道路工况下传统模糊控制策略的仿真结果如图9所示。其中图9(a)为燃料电池客车在CCBC道路工况下的速度跟随情况,可以看出在模糊控制策略下燃料电池客车在CCBC道路工况下行驶状况良好,动力性能够达到CCBC道路工况的要求;图9(b)为在燃料电池客车在整个行驶过程中锂离子电池SOC值变化情况,其变化趋势慢慢下降,但SOC波动范围在[0.6,0.8]之间,保证了锂离子充放电安全性及高效性;图9(c)为燃料电池客车在整个行驶过程中燃料电池实际输出功率变化情况,波动范围大致在[5 kW,28 kW]区间内,波动幅度偏大;图9(d)为整个CCBC道路工况中电机需求功率的变化,即总线需求功率的变化。总体上该传统模糊控制策略基本能够满足燃料电池客车在CCBC工况下的动力性和经济性要求。 图9 传统模糊控制策略下的仿真结果 总线需求功率在[-100 kW,0]范围内时,燃料电池客车处于制动能量再生的模式,此时电机制动的能量用于向锂电池充电。当需求功率在[0,120 kW]范围内时,燃料电池处于单独供电或者与锂离子电池一起供电的模式。 模糊语言变量的定量描述是由它的隶属度函数确定,隶属度函数有离散的也有连续的,其中连续隶属度函数较为常用,连续隶属度函数有三角形、梯形和高斯型等。总线需求功率Pb在[0,120 kW]范围内的隶属度函数采用高斯型隶属度分布函数,如图10所示;总线需求功率Pb在[-100 kW,0]范围内的隶属度函数采用梯形函数隶属度分布函数,如图11所示。 该分段模糊控制策略主要分为两个模块。第一个模块包含驱动工况Pb信号分离模块,将Pb信号分为[-100 kW,0]、[0,120 kW]两段,然后将制动工况、驱动工况下分别进行了模糊控制,最后将驱动和制动工况下的燃料电池输出功率合理匹配,如图12所示。 图10 非制动工况总线需求功率隶属度函数 图11 制动工况总线需求功率隶属度函数 图12 分段模糊控制策略Simulink模型图 燃料电池效率随着增益系数K1的减小呈现出先增大后减小的趋势。当K1增大到0.5时,燃料电池效率达到最大,因此选定增益系数K1和K2都为0.5,此时燃料电池效率为0.59(最大效率为0.6),锂离子电池效率为0.95。 燃料电池客车在CCBC工况下分段模糊控制策略的仿真结果如图13所示。其中从图13(a)可以看出在模糊控制策略下,燃料电池客车在CCBC工况下行驶状况良好,实际行驶车速曲线与工况车速曲线基本一致,动力性能够达到CCBC工况的要求;图13(b)为在燃料电池客车锂离子电池SOC值变化趋势慢慢下降,但SOC波动范围还在[0.6,0.8]之间,保证了锂离子充放电安全性及高效性;图13(c)为燃料电池客车燃料电池实际输出功率变化情况,波动幅度在[14 kW,25 kW]之间;图13(d)为整个CCBC道路工况中电机需求功率的变化,即是总线需求功率的变化。 图13 分段模糊控制策略下燃料电池客车仿真结果 (1)传统模糊控制策略和分段模糊控制策略下锂离子电池SOC值比较。传统模糊控制策略和分段模糊控制策略下锂离子电池SOC值变化对比如图14所示。 图14 电池SOC值变化对比图 从燃料电池提供给整车的功率占整车消耗功率比考虑,分段模糊控制策略更符合燃料电池客车控制策略设计要求。 (2)燃料电池效率和锂离子电池效率比较。分段模糊控制策略下燃料电池效率为0.59,锂离子电池效率为0.95,锂离子电池释放了17 767 kJ能量。 分段模糊控制策略对比传统模糊控制策略,燃料电池输出功率占比提高了20.7%,燃料电池效率提高了4%。 (3)燃料电池输出功率波动幅度。从图15知分段模糊控制策略下燃料电池输出功率波动幅度明显小于传统模糊控制下燃料电池输出功率波动幅度。 图15 不同控制策略下燃料电池输出功率比较图 分段模糊控制策略与传统模糊控制策略的仿真结果如表5所示,其分段模糊控制策略优势如下:①燃料电池效率从55%提高到59%;②燃料电池输出功率占燃料电池客车总线需求功率比值提高了20.7%;③分段模糊控制策略下燃料电池输出功率波动幅度小,有效减缓了燃料电池寿命的衰减。 表5 分段模糊控制策略和传统模糊控制策略仿真结果对比 根据燃料电池动力性和经济性要求,对燃料电池客车的关键动力部件燃料电池、锂离子电池、驱动电机进行了参数匹配,确定了驱动桥的传动比。使用ADVISOR对燃料电池客车在传统模糊控制策略和分段模糊控制策略下进行仿真。仿真结果表明分段模糊控制策略将燃料电池效率提高了4%,同时降低了燃料电池输出功率波动幅度。2 燃料电池汽车动力系统部件参数匹配
2.1 整车参数及动力性能要求


2.2 驱动桥速比确定



3 模糊控制器设计与仿真
3.1 模糊控制器的设计



3.2 传统模糊控制策略Simulink建模与仿真


3.3 传统模糊控制器改进



3.4 仿真结果对比



4 结论
猜你喜欢
太阳能(2022年2期)2022-03-07
成都信息工程大学学报(2021年6期)2021-02-12
内燃机与配件(2020年3期)2020-09-10
电子制作(2019年16期)2019-09-27
电子制作(2016年21期)2016-05-17
汽车工程(2016年11期)2016-04-11
通信电源技术(2016年5期)2016-03-22
军民两用技术与产品(2016年3期)2016-01-05
汽车工程(2014年7期)2014-10-11
中国机械工程(2012年3期)2012-11-30