基于多极化特征和纹理特征的PolSAR图像分类
2019-07-05 09:51宋瑞超赵国忱卜丽静
城市勘测 2019年3期
宋瑞超,赵国忱,卜丽静
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
1 引 言
全极化合成孔径雷达(polarimetric synthetic aperture radar,PolSAR)具有全天时、全天候和透射性强等诸多优点,极化SAR 影像的地物分类技术逐渐成为各国学者的研究热点[1,2]。极化SAR影像全面包含了地物的散射信息,其获得的HH、HV、VH、VV四种散射回波信息能够很好地提高极化SAR影像的分类精度。2007年,Touzi[3]等人提出一种旋转不变非相干分解法,用多个极化分量进行分类实验,加入极化特征能够提高湿地的分类精度。2014年,Van Beijma[4]等人应用Freeman-Durden分解和VanAyl分解等方法,对海岸区域进行分类,结果表明,多种极化特征的结合使分类效果大大提高。另外,PolSAR影像中含有大量的纹理信息,纹理特征的应用也能有效改善地物分类的结果。2013年,Hu[5]等人提出了一种稀疏编码的小波纹理元方法,通过采样构建目标的纹理基元库,将纹理信息用于图像分类中,这种方法具有较高的分类精度。但以上两种特征的分别使用都有其缺点。相对于纹理特征,基于极化特征的分类中,道路、水泥房顶等地物的散射机制与水体相似,无法将其区分开来。而仅基于纹理特征的分类中,由于浅草和裸地表面都较为平滑,其纹理特征与水体相似,三者并不能完全区分开来。针对以上问题,本文提出一种结合极化特征与纹理特征的SVM(Support vector machine)分类方法,以湖北武汉市的GF3数据为例进行分类实验,已有效改善PolSAR图像的分类效果。
2 多极化特征和纹理特征的PolSAR图像分类算法原理
极化SAR影像中散射体的多极化特征可以反映PolSAR数据的本质属性,描述目标的幅度和相位变化的完整信息。另外,PolSAR影像中的大量纹理特征反映散射体内部有规律变化形成的影像结构。分别提取影像的多极化特征和纹理特征,将多极化特征与纹理特征两种性质完全不同的特征进行选择与融合描述地物,使地物的表征更加完整,分类精度更高,更加具有实用性。
因此本文对输入影像进行去噪预处理,降低相干斑噪声后,提取出影像的极化特征和纹理特征,对这两种不同性质的特征进行选择与融合,组成特征向量,用于结合极化特征和纹理特征的SVM非监督分类实验。为了检验本文分类实验的效果,又进行了只加入极化特征,只加入纹理特征的非监督分类实验以及Wishart监督分类实验,将四种不同的实验结果进行对比分析。
2.1 极化特征提取
极化特征提取是本实验的关键步骤。将极化信息应用于分类实验可以改善目标的分类结果[6]。散射体的极化特性是由散射矩阵、Stokes矩阵、相干矩阵、协方差矩阵表示的,其中相干矩阵T和协方差矩阵C中的元素具有一定的物理意义[7,8]。基于目标的散射属性,将极化SAR数据的后散射系数变形得到散射矩阵S,再将散射矩阵S进行矢量化可得到相干矩阵T与协方差矩阵C,从这些矩阵中可直接得到目标的基础特征,它反映的是PolSAR数据的本质属性,可以提取幅度和相位变化的完整信息。
对于线性电磁散射的雷达目标,只要已知散射空间坐标系和相应的极化基,就可以用线性变换关系表示雷达照射波和目标散射波的各极化分量。极化散射矩阵S是用一个复二维矩阵表示目标的变极化效应的,表示在特定的姿态和观测频率下目标的全极化信息。定义本地笛卡尔坐标系(H,V),后向散射矩阵[S]可表示为:
(1)
散射矩阵S包含完全的电磁散射特征,可以描述目标的能量、相位和极化特征。但实际得到的极化SAR图像中存在较多的分布式目标不能用散射矩阵表示,并且在进行图像处理中需滤出相干斑噪声,由此引入相干矩阵T和协方差矩阵S。
利用Pauli基矩阵对散射矩阵S进行矢量化可得相干矩阵[T3]:
(2)
其中K3P为Pauli基矩阵,H为复共轭转置运算符,*为复数共轭运算符:
(3)
利用Lexicographic基矩阵对散射矩阵矢量化可得协方差矩阵[C3]:
(4)
其中K3L为Lexicographic基矩阵,H为复共轭转置运算符,*为复数共轭运算符:
(5)
相干矩阵与协方差矩阵是一对相似矩阵,一方可以通过相似变换得到另一方。
在对PolSAR理论知识充分理解的基础上,提取出可用于SVM监督分类的极化参数。相干矩阵T和协方差矩阵C包含表示能量的实数3个对角线元素和6个独立的复数元素。各元素表示的是各极化通道之间的相关性,特别是协方差矩阵中的元素反映了在各极化通道下目标的后散射系数与通道间的相关系数。相干矩阵T适用于极化分解、分类和识别,协方差矩阵更适合于相干斑抑制等。
本文提取相干矩阵的对角线元素T11、T22、T33以及协方差矩阵的对角线元素C11、C22、C33,复数C12的模|C12|、相位角∠C12,复数C13的模|C13|、相位角∠C13,复数C23的模|C23|、相位角∠C2312个元素。将这12个元素组成极化特征向量FV,见式(6):
FV={T11,T22,T33,C11,C22,C33,∠C12,|C12|,∠C13,|C13,|,∠C23,|C23|}
(6)
2.2 纹理特征提取
极化SAR影像中的纹理信息可以有效地反映地物特征,对纹理信息的全面认知将大大提高图像的分类精度。本文基于经典的灰度共生矩阵法进行纹理特征的提取[9,10],提取信息熵(ENTROPY)、对比度(CONTRAST)、均值(MEAN)、相异性(DISSIMILARITY)、协同性(HOMOGENEITY)、一致性(UNIFORMITY)这6个纹理特征统计量进行实验,计算方法如下:
(1)信息熵(ENTROPY)

(7)
信息熵是图像中信息量的度量,反映影像中纹理信息的复杂度和随机性,熵值越大,图像纹理越复杂,纹理随机性越大[11]。
(2)对比度(CONTRAST)
(8)
对比度是图像中的局部灰度变化的总量,反映影像清晰度和纹理沟纹的深浅,对比度越大,图像越清晰,沟纹越深;反之,对比度越小,图像越模糊,沟纹越浅[12]。
(3)均值(MEAN)
(9)
均值是图像中所有像素灰度的平均值,反映图像灰度的均匀性。
(4)相异性(DISSIMILARITY)
(10)
其中|i-j|=n0
相异性表示图像纹理间的相异性,相异性越大,纹理间差异越大。
(5)协同性(HOMOGENEITY)
(11)
协同性也叫局部相似性,是图像中局部区域的纹理特征的相似性,也就是说,局部相同的区域可能就是同属一类的目标。
(6)一致性(UNIFORMITY)
(12)
一致性也是反映图像中局部区域的纹理信息。
将这6种纹理特征组合成一个纹理特征向量T,如式(13)所示:
T={CON,DIS,ENT,HOM,MEA,UNI}
(13)
2.3 算法流程
SVM分类方法是由线性可分情况下的最优超平面发展而来,被推广到非线性可分的数据中去[13]。如图1所示,在二维平面内,空心点和实心点分别代表不同的两类,这两类能够被多条分割线(平面)正确地区分开来,其中H称为分类超平面,H1和H2分别为两类离H最近的样本所在的且平行于H的超平面,H1与H2到H的距离相等,它们之间的距离称为分类间隔,为了提高分类精度,找到一个最优超平面,使其将这两类样本正确地分开且分类间隔最大,这类情况称为样本线性可分[14]。

图1 最优超平面示意图
若这两类样本不能被直线正确地分割开来(即非线性可分),SVM分类针对这种情况将低维的非线性可分数据通过核函数(非线性映射方法)映射到高维特征空间,将在高维特征空间中通过样本训练构造的最优分类超平面作为判决面,使两类数据到该平面的距离最大,从而使分类风险上界最小[15]。这种分类方法需输入每个类别的训练样本,后续也可以通过检验样本来进行分类精度的评价。
本算法的基本流程为:在输入原始极化SAR图像后,进行图像去噪预处理,降低相干斑噪声,尤其是由于成像系统与水域内大型金属材质的船只原因造成的十字叉型的噪声,预处理同时保留较好的地物纹理信息。图像预处理后分别提取影像的多极化特征和纹理特征。用不同的基对极化散射矩阵矢量化分别得到相干矩阵T和协方差矩阵C,将相干矩阵T与协方差矩阵C中的有效元素进行组合得到极化特征FV={T11,T22,T33,C11,C22,C33,∠C12,|C12|,∠C13,|C13,|,∠C23,|C23|}。基于灰度共生矩阵法提取各个纹理特征参数,组成纹理特征向量T={CON,DIS,ENT,HOM,MEA,UNI}。然后对这两种不同性质的特征向量进行选择与融合,进行结合多极化特征与纹理特征SVM分类实验,并将实验结果进行精度分析,算法流程如图2所示:

图2 算法流程图
3 分类实验
3.1 实验数据
本实验选用湖北武汉市的PolSAR数据进行分类实验,数据参数如表1所示。

实验数据参数 表1

图3 实验数据
在该PolSAR影像中截取一块地物丰富的区域进行研究,该区域内中主要包括植被、水体、道路、裸地和建筑物5种地物。进行分类实验前需分析地物特征,其中植被表现复杂的体散射,其回波能量适中,呈现出亮度适中且整体具有相似性的绿色信息;水体表现为单次的光滑表面散射,其回波能量较少,呈现亮度较低的偏黑色信息;道路表现为高亮的白色信息且具有细长型的特点;建筑物表现为偶次散射,回波能量较高,呈现高亮粉白色信息;裸地表现单次散射,呈现为整体较均匀的淡紫色信息[16]。如图3为实验区光学影像与极化SAR图像对比图:
3.2 极化特征向量提取
基于测量矩阵提取目标的极化特征向量,散射矩阵S经矢量化计算后得到相干矩阵T和协方差矩阵C,这两个矩阵能够反映全部的极化特性,其中的元素具有一定的物理意义。实验中提取相干矩阵的对角线元素T11、T22、T33以及协方差矩阵的对角线元素C11、C22、C33,和复数C12的模|C12|、相位角∠C12,复数C13的模|C13|、相位角∠C13,复数C23的模|C23|、相位角∠C2312个元素,组成极化特征向量。图4为每个极化参数的图像表示:

图4极化参数图像
3.3 纹理特征向量提取
基于经典的灰度共生矩阵法进行纹理特征向量的提取,提取信息熵(ENTROPY)、对比度(CONTRAST)、均值(MEAN)、相异性(DISSIMILARITY)、协同性(HOMOGENEITY)、一致性(UNIFORMITY)这六个纹理特征,组成纹理特征向量,每个纹理参数的图像表示如图5所示:

图5纹理参数图像
3.4 PolSAR图像分类结果与分析
在进行特征向量提取后,利用SVM分类器,进行基于多极化特征与纹理特征的PolSAR图像分类实验。为了检验这种分类方法的效果,另外进行了Wishart监督分类,只加入极化特征的SVM监督分类和只加入纹理特征的SVM分类,对结果进行对比与精度分析。图6为四种分类方法的结果对比图,图中绿色代表植被,蓝色代表水体,黄色代表建筑物,黑色代表道路,粉色代表裸地。图6(a)为Wishart监督分类,图6(b)为只加入极化特征的SVM分类结果,图6(c)为结合纹理特征的SVM监督分类结果,图6(d)为结合极化和纹理特征的SVM分类结果:
图6分类结果对比图
由图6可以看出,经Wishatr监督分类后5种地物被区分开来,但建筑物与裸地出现明显错分现象,并存在严重的噪声影响。只加入极化特征的SVM分类结果中,5种地物区分不明显,水体较模糊,但噪声影响有所改善。只加入纹理特征的SVM分类结果中,水体区分明显,轮廓也较为清晰,但存在黄色建筑物的斑点状况,建筑物、裸地与道路的划分都较不准确。而结合极化与纹理特征后,5种地物的划分都有了很好改善,水体的轮廓更加清晰,噪声影响也明显减少。
为进一步将分类结果进行对比,4种分类方法样本的混淆矩阵如表2~表5所示:

Wishatr监督分类样本混淆矩阵 表2
结合极化特征的SVM分类样本混淆矩阵 表3

结合纹理特征的SVM分类样本混淆矩阵 表4

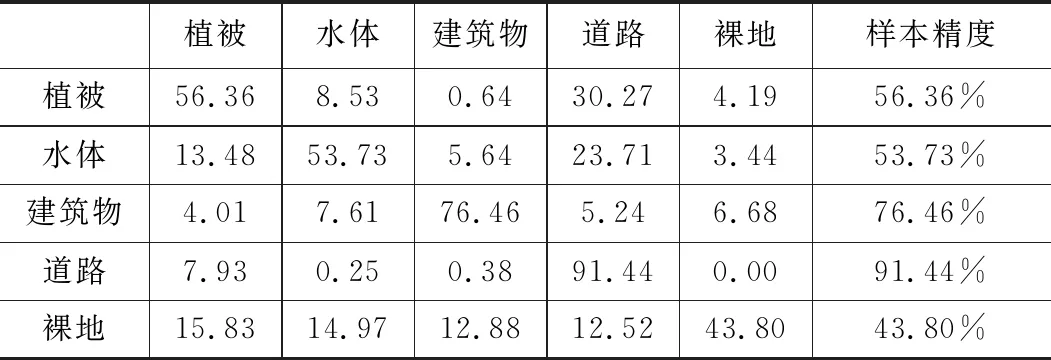
结合极化与纹理特征的SVM分类样本混淆矩阵 表5
由样本的混淆矩阵可以看出,Wishatr监督分类中植被、水体和道路三种地物都得到大致区分,其中水体的样本精度达到99.90%,但建筑物与裸地的分类精度不高。只加入极化特征的SVM分类得到的混淆矩阵显示植被、水体、建筑物、裸地都出现明显的错分现象,其样本精度很低。只加入纹理特征的SVM分类实验中,水体的精度较高,但建筑物的样本精度仅为44.52%,错分较明显。结合极化与纹理信息的SVM分类结果中植被,水体,建筑物,道路,裸地五种地物的样本精度综合来看都高于另外三种监督分类方法,说明本文的分类方法能够有效改善分类效果。
4 结 语
本文提出了一种结合多极化特征向量与纹理特征向量的PolSAR图像分类方法。首先阐述了算法原理;然后进行实验验证,为了检验本文方法的实验效果,又分别进行了Wishart监督分类、仅加入极化特征的SVM监督分类和仅加入纹理特征的SVM PolSAR图像分类实验;最后将四种实验结果进行对比与精度分析,从对比结果中可以看出,与其他三种分类方法相比,结合极化和纹理信息的SVM分类方法结果中五种地物都能得到准确划分,对道路、水体和建筑物的区分最为明显,且噪声影响较小,有效提高了分类精度。极化SAR图像分类的研究还需进一步探索,本文提出的分类算法对本文实验数据具有有效性,后续需要再应用更多的实验数据来验证本文提出的分类算法。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
保定学院学报(2022年2期)2022-04-07
北京航空航天大学学报(2021年9期)2021-11-02
航天电子对抗(2019年4期)2019-06-02
数学大世界(2019年7期)2019-05-28
计算机应用与软件(2019年2期)2019-04-01
雷达学报(2017年3期)2018-01-19
中华建设(2017年1期)2017-06-07