
基于仿真与试验平台的摆动导杆机构急回特性教学研究
2019-07-10 12:02张蔚乔生红张永其
科教导刊 2019年28期
关键词:探索者
张蔚 乔生红 张永其
摘 要 以摆动导杆机构急回特性的教学为例,设计了结合虚拟样机仿真手段与实物样机试验手段的教学环节,为学生提供了一种便捷和开放的互动学习途径,增进了学生对急回特性的感性认识和理性理解,为强化以学生为主体的教学模式和提高课堂教学质量进行了尝试。
关键词 摆动导杆机构 急回特性 虚拟样机 探索者
中图分类号:G712 文献标识码:A DOI:10.16400/j.cnki.kjdks.2019.10.011
Abstract In this paper, based on the quick-return characteristic of swinging guide rod mechanism, the teaching link combining virtual prototype simulation method and real prototype test method is designed, which provides a convenient and open way of interactive learning for students, and improves perceptual knowledge and rational understanding of the quick-return characteristic. Strengthening the teaching mode of with students as the main body and improve the quality of classroom teaching were made.
Keywords swinging guide rod mechanism; quick-return characteristic; virtual prototype; explorer
0 引言
急回特性是平面连杆机构的重要运动特性之一,在实际应用中,可以用来调节执行件的往复运动速度,缩短空行程的时间,提高生产效率。[1-4]
摆动导杆机构是由曲柄滑块机构选取不同的构件作为机架演化而成的,这种机构最大的优点是当曲柄为主动件时,传动角始终为90埃患薪鞘贾沾笥?埃讜硕讨泻阌屑被靥匦裕虼斯惴旱挠τ糜谂M放俅病⒓蛞撞宕病⑼词皆耸浠突刈接捅玫然荡爸弥小5]
1 摆动导杆机构的急回特性
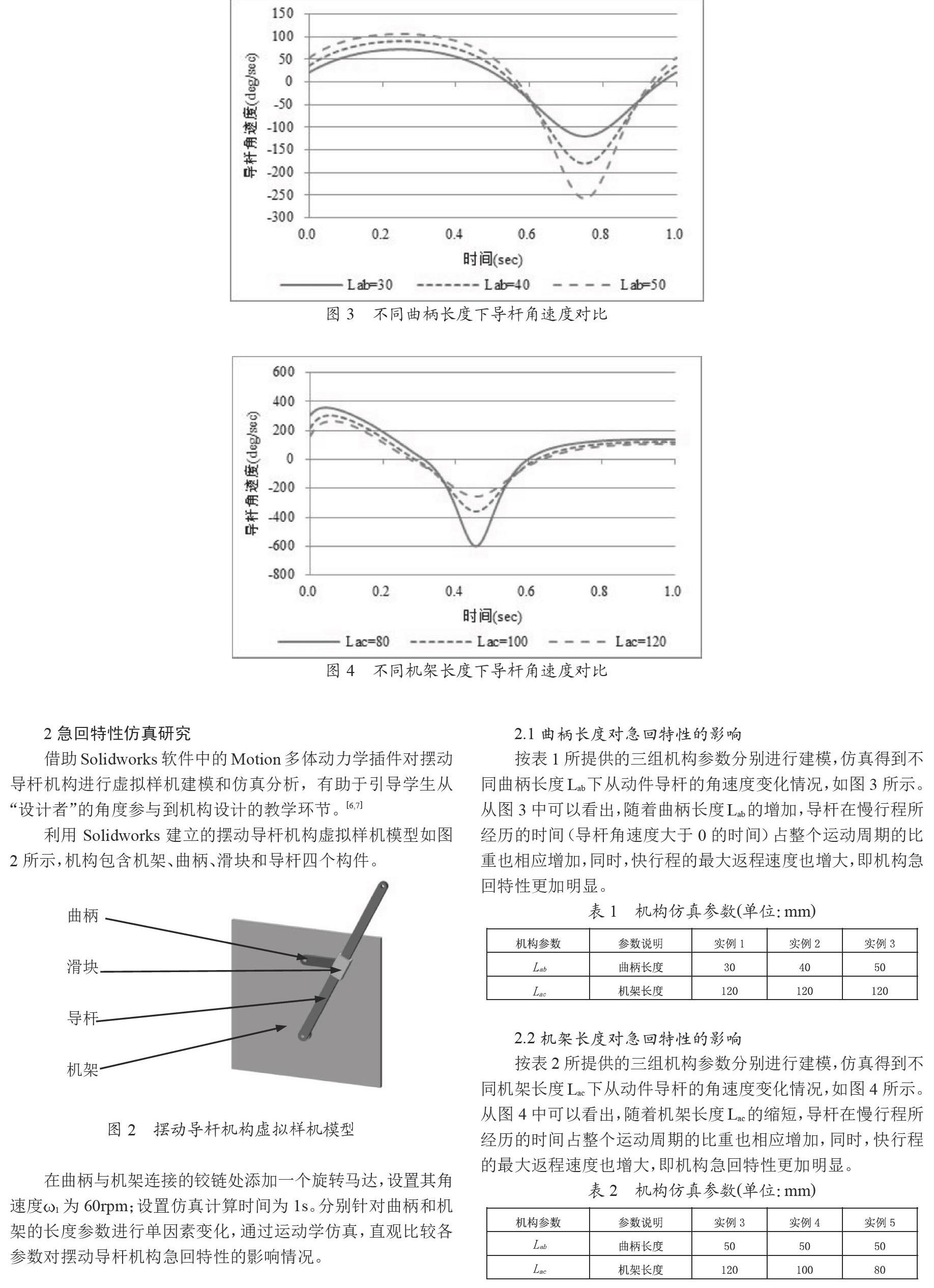
2 急回特性仿真研究
借助Solidworks软件中的Motion多体动力学插件对摆动导杆机构进行虚拟样机建模和仿真分析,有助于引导学生从“设计者”的角度参与到机构设计的教学环节。[6,7]
利用Solidworks建立的摆动导杆机构虚拟样机模型如图2所示,机构包含机架、曲柄、滑块和导杆四个构件。
在曲柄与机架连接的铰链处添加一个旋转马达,设置其角速度 1为60rpm;设置仿真计算时间为1s。分别针对曲柄和机架的长度参数进行单因素变化,通过运动学仿真,直观比较各参数对摆动导杆机构急回特性的影响情况。
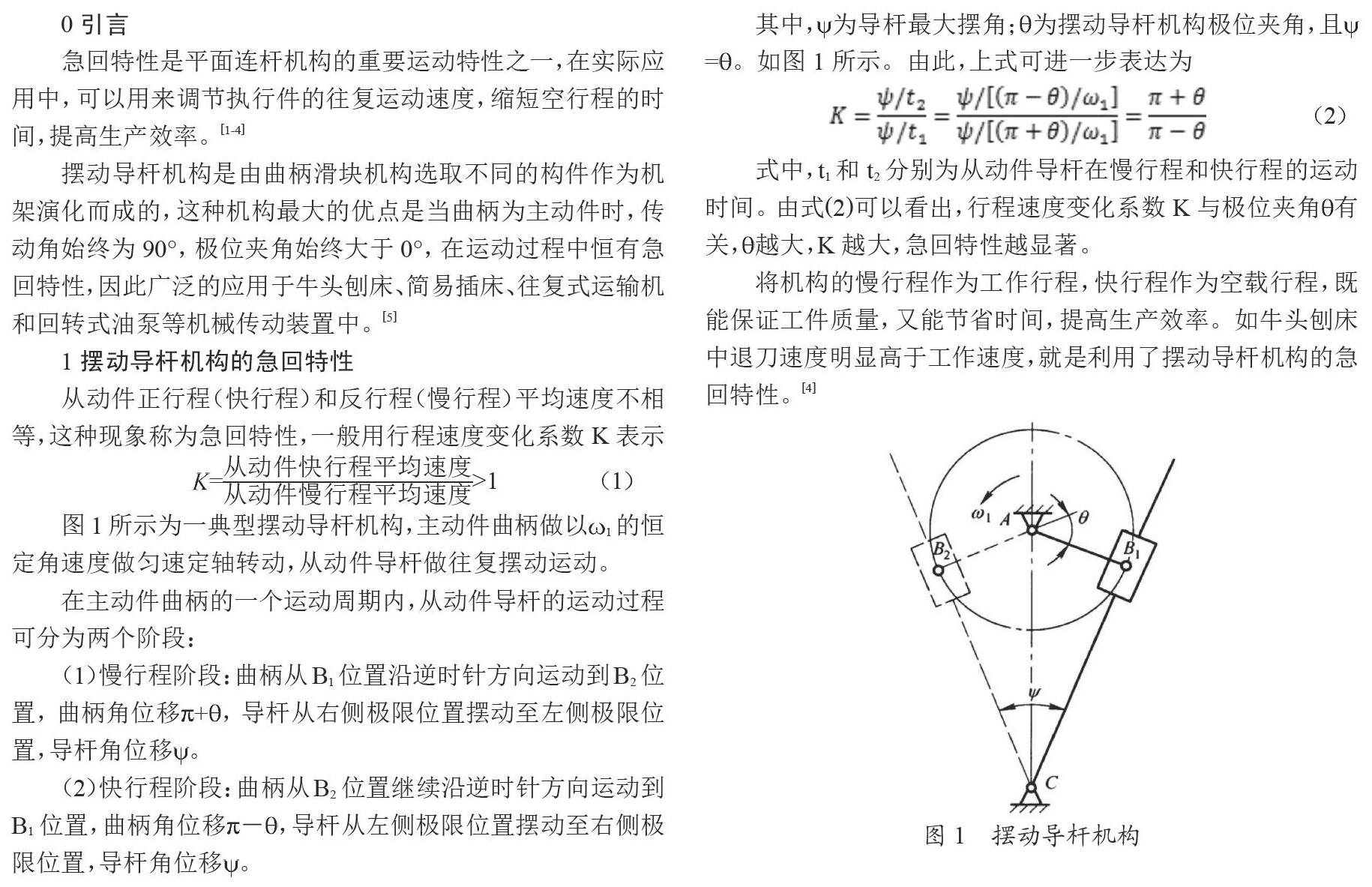
2.1 曲柄长度对急回特性的影响
按表1所提供的三组机构参数分别进行建模,仿真得到不同曲柄长度Lab下从动件导杆的角速度变化情况,如图3所示。从图3中可以看出,随着曲柄长度Lab的增加,导杆在慢行程所经历的时间(导杆角速度大于0的时间)占整个运动周期的比重也相应增加,同时,快行程的最大返程速度也增大,即机构急回特性更加明显。
2.2 机架长度对急回特性的影响
按表2所提供的三组机构参数分别进行建模,仿真得到不同机架长度Lac下从动件导杆的角速度变化情况,如图4所示。从图4中可以看出,随着机架长度Lac的缩短,导杆在慢行程所经历的时间占整个运动周期的比重也相应增加,同时,快行程的最大返程速度也增大,即机构急回特性更加明显。
3 急回特性试验研究
为验证上述仿真分析的结论,采用“探索者”创新平台模块组件搭建的摆动导杆机构,如图5所示。通过直流电机驱动曲柄,即可实现摆动导杆机构的运动。
按照前文仿真实例的参数构建不同的实物样机。为获得从动件导杆的急回特性,在导杆双侧极限位置(摆角最大位置)设置光电传感器,记录导杆每次运行到极限位置的时间,从而进一步可计算出摆动导杆机构快、慢行程所经历的时间。为降低试验中时间测试误差,为电机设置较低转速6r/min。
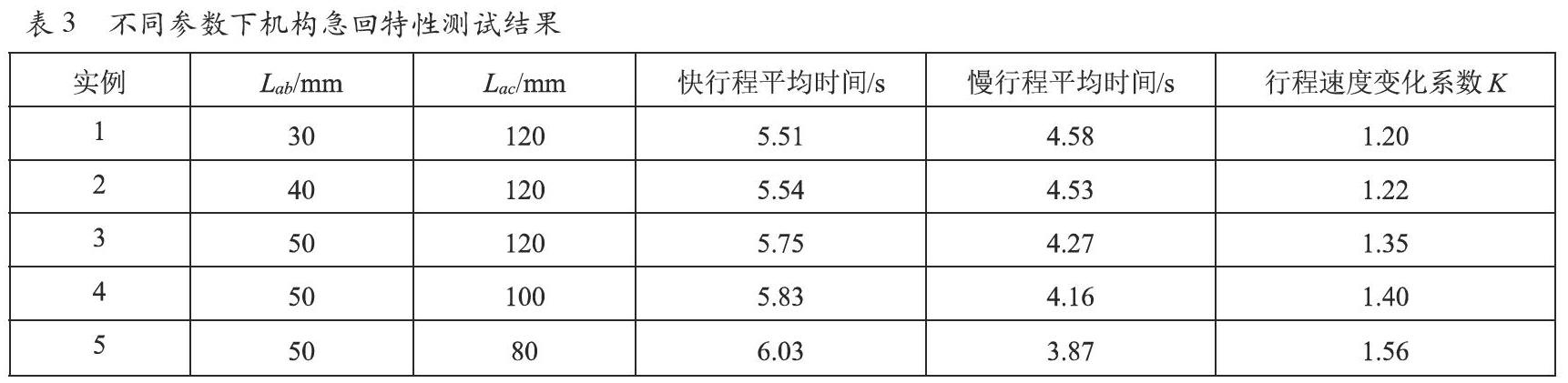
表3为各组机构参数下摆动导杆机构快、慢行程用时的多次测试的平均值,以及根据式(1)计算得到的相应行程变化系数K。
表3中实测数据反映的摆动导杆机构的急回特性与机构参数的关系与前文中仿真结论一致。
4 结束语
本文以摆动导杆机构为例,利用Solidworks Motion提供的仿真手段,通过对从动件导杆角加速度曲线的跟踪,定性分析了不同机构参数对机构急回特性的影响规律。随后,基于“探索者”创新平台,通过实物样机的构建和试验,为仿真结论提供了进一步佐证。
通过在教学过程中引入仿真分析和实物试验的实践环节,相比传统理论教学,提供了更加便捷和开放的学习途径,加深了学生对机构急回特性的感性认识和理性理解,强化了以学生为主体的知识、理论、实践一体化的教学,获得了更好的教学效果。
2019年江苏省高等学校大学生创新创业训练计划项目:基于虚拟样机的多足行走机构设计开发(201912807022Y)
参考文献
[1] 曲辉,毛君,席本强.平面连杆机构急回特性讨论[J].辽宁工程技术大学学报,2005.24(4):206-208.
[2] 王美蓉.具有急回特性的平面四杆机构的比较与应用研究[J].机械制造,2014.43(6):43-45.
[3] 谢响明.平面四杆机构急回特性的分析与应用[J].装备制造技术,2008(7):55-56.
[4] 程引正.平面四杆机构急回特性的讨论及应用[J].机械研究与应用,2013(6):154-155.
[5] 郑文纬,吴克坚.机械原理(第7版)[M].北京:高等教育出版社,2013.4.
[6] 刘文超.Solidworks在曲柄摇杆机构设计教学中的应用研究[J].中国战略新兴产业,2018.7(32):220-221.
[7] 李启鹏,刘万俊,仝崇楼,等.SolidWorks运动仿真的平面八连杆机构优化设计[J].机械传动,2009.33(1):63-64.
猜你喜欢
科研成果与传播(2021年4期)2021-04-18
ELLE世界时装之苑(2021年4期)2021-04-07
江苏教育(2020年15期)2020-11-09
科教新报(2019年39期)2019-09-10
教师·上(2018年5期)2018-11-12
北方文学(2018年11期)2018-05-25
教学与管理(中学版)(2017年6期)2017-07-07
读书(2016年7期)2016-07-14
新课程·下旬(2015年1期)2015-10-21
环球时报(2010-02-04)2010-02-04
