基于主动射流的汽车后视镜区域气动噪声控制
2019-08-06 03:18李启良杜文海王毅刚杨志刚
同济大学学报(自然科学版) 2019年8期
李启良, 杜文海, 王毅刚, 杨志刚,3
(1.同济大学 上海地面交通工具风洞中心, 上海 201804;2.上海市地面交通工具空气动力与热环境模拟重点实验室, 上海 201804; 3.北京民用飞机技术研究中心, 北京 102211)
汽车在行驶过程中产生的噪声对驾乘舒适性有重要的影响.随着发动机和轮胎路面噪声的降低,气动噪声成为高速行驶车辆的主要噪声源.由于后视镜区域流动特点及其所处特殊位置,后视镜区域产生的气动噪声长期受到研究人员的广泛关注.
在气动噪声预测和分析方面,Chen等[1]在通用风洞试验室布置了9个表面传声器和6个远场传声器测量GMT360后视镜,发现在流动非常复杂的地方容易产生气动噪声;Li等[2]通过风洞试验发现后视镜产生的气动噪声主要集中在中低频,随着来流速度的增大,尾部的涡脱落频率呈现线性增大的趋势.Nouzawa等[3]采用三阶迎风格式的有限差分法求解流场,使用Powell的声学模型来评价声源,发现控制A柱和后视镜分离涡的相互作用能有效控制侧窗气动噪声.陈鑫等[4]发现后视镜尾流区域存在近似半椭球的低速层,低速层中存在沿两条涡流中心轨迹线流动的反向旋转涡流,并伴有明显的湍流,造成了前侧窗上的压力脉动.
在外形控制和被动流动控制方面,刘海军等[5]改进后视镜外型,底部凸起而其余部分开槽,改善了侧窗外流场湍流脉动压力、漩涡和声源位置分布,减少了后视镜通过侧窗传播到车内的噪声.Li等[6]建立后视镜区域参数化模型并采用遗传算法进行气动噪声优化控制,实现了前侧窗湍流脉动总压力级降低4.1 dB(A),车内前排和后排噪声分别降低2.1 dB(A)和1.4 dB(A).陈鑫等[7]在后视镜边缘采用直径为4 mm的半圆形凹槽来改变速度和流线的角度,降低后视镜尾部的湍动能和声功率级.
随着研究的深入,主动流动控制已出现在汽车气动减阻上,也在圆柱噪声控制上有所尝试.Dalla等[8]在D形体尾部加射流激励器并通过一个反馈的闭环控制,降低时均压力和脉动压力,从而降低压差阻力.McNally等[9]在对HSB(Honda simplified body)模型进行射流控制实验时发现,当射流位于x/L=95.2% 时,减阻为1.9%;当射流位于x/L=91.9%时,减阻增加到2.6%(x为射流位置所在坐标,L为车长).Minelli等[10-12]在卡车A柱上进行主动控制发现,当驱动频率接近剪切层频率时,气动阻力优化可以达到较好的减阻效果.李红丽等[13]通过在上游圆柱体模型后半部的内、外表面铺设四组等离子体激励器,发现总声压级最大可降低3 dB.
回顾以往研究发现,外形控制和被动流动控制仍是当前气动噪声优化的主要手段,主动流动控制技术已开始应用在气动问题上,但尚未涉及到气动噪声控制.为此本文尝试建立基于定常主动射流的气动噪声仿真模型,评估射流位置、速度和角度等参数对后视镜区域气动噪声的影响,寻找合适的射流参数,为汽车后视镜气动噪声优化提供新方向.
1 仿真方法
1.1 仿真模型
基于某量产车,建立了整车气动噪声仿真模型,如图1a所示.整车(长L=4 434 mm,宽W=2 034 mm,高H=1 494 mm)放置在8L×6W×4H的计算域上.进口与车头最前端距离为2L,出口与车尾最后端距离为5L.使用Hypermesh生成模型的面网格,总面网格数为315万个.车身表面面网格大小为8.0 mm;门把手和格栅面网格大小分别为1.5 mm和2.0 mm;挡风玻璃、前后侧窗、后三角窗以及后窗面网格大小均为5.0 mm;后视镜前脸和后脸面网格大小分别为1.0 mm和2.0 mm.整车模型含发动机舱、底盘等局部结构,如图1b所示.

a 计算域
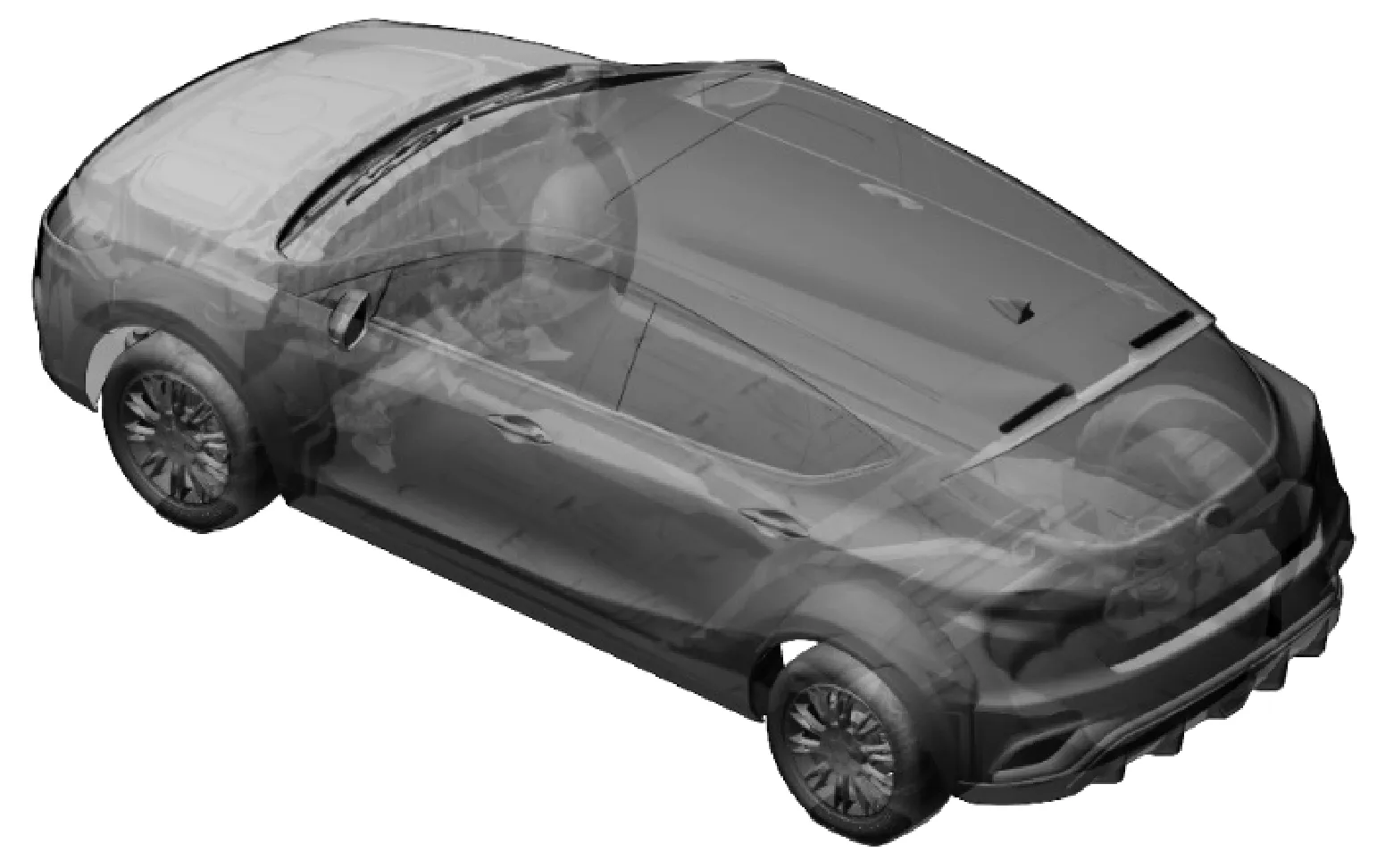
b 整车模型
将整车面网格导入STAR CCM+,并生成Trimmer+layer的体网格.在车身等壁面位置生成边界层网格,边界层数为8层,增长率为1.1,边界层总厚度为0.5 mm.对整车底部、尾部以及侧窗部分的空间进行局部加密,总体网格数量约为7 000万个.设置入口速度为U∞=140 km·h-1,出口压力为0 Pa,采用可实现性k-ε湍流模型[14]进行定常流场计算.
1.2 非定常流场的仿真方法
待定常流场计算结束后,采用大涡模拟[15]进行非定常流场计算,以得到后视镜等区域湍流脉动压力等.大涡模拟方程如下:

(1)
(2)

(3)
(4)

1.3 近场声压仿真方法
为了获得后视镜等附件区域的声压,尝试建立基于声扰动方程APE (acoustic perturbation equations)[16]的气动噪声计算方法.声扰动方程可以在时域上对全场的声压进行计算,能够考虑壁面反射、介质折射等声学特性,已在剪切流、旋转涡流和圆柱绕流等问题上有所应用.不可压缩声扰动方程如下:

(5)

1.4 计算设置
当气流经A柱和后视镜时,形成了车外最主要的气动噪声源.为此将后视镜区域设定为声源区,如图2所示.设置APE声源权重为1,声传播阻尼为0,在噪声计算区域外,设置APE声源权重为0,声传播阻尼为1,过渡边界上的取值采取汉宁窗计算,保证0~1间的平滑过渡.

图2 声源区
采用二阶的时间离散格式,时间步长为0.000 05 s,可获得10 kHz以下的湍流脉动压力和声压频谱.为了避免由于空间网格不足产生的假声,设置了二阶低通时间过滤器(second-order butterworth low-pass time filter),有效控制频率在1.5~10.0 kHz之间.在非定常流场计算中,首先采用0.000 5 s的时间步长,一共计算0.5 s的物理时间.之后,将时间步长切换为0.000 05 s,并经过1 000步计算使流场的波动完全稳定后,开始对压力和速度进行采样,用于后续声扰动方程的计算.经过500步的采样,平均场基本收敛,可以开始声扰动方程的计算.再经过500步后,开始采集湍流脉动压力和声压,一共进行了2 500步的采样.在同济大学的1 352核高性能计算集群下,每个工况使用84核,需要120 h才能完成.
2 仿真与试验结果对比
将仿真得到的前侧窗表面的湍流脉动压力和声压进行能量叠加(下文表述为总压力级),并与风洞试验结果进行对比.前侧窗的风洞试验在同济气动-声学整车风洞进行.该风洞喷口面积为27 m2,最大风速为250 km·h-1,速度稳定度为±1.0 km·h-1.在喷口速度为160 km·h-1时,背景噪声仅为61.0 dB(A).试验开始前,对车内进行密封,并按照图3所示的测点位置布置表面传声器.为了减少表面传声器外形对测量结果的影响,分4组完成19个测点的测量.试验前对所有传感器进行标定,并设定采样频率和时间分别为48 kHz和10 s.标定后,当喷口风速达到140 m·h-1,温度稳定在15 ℃左右时,开始采集测点压力脉动.

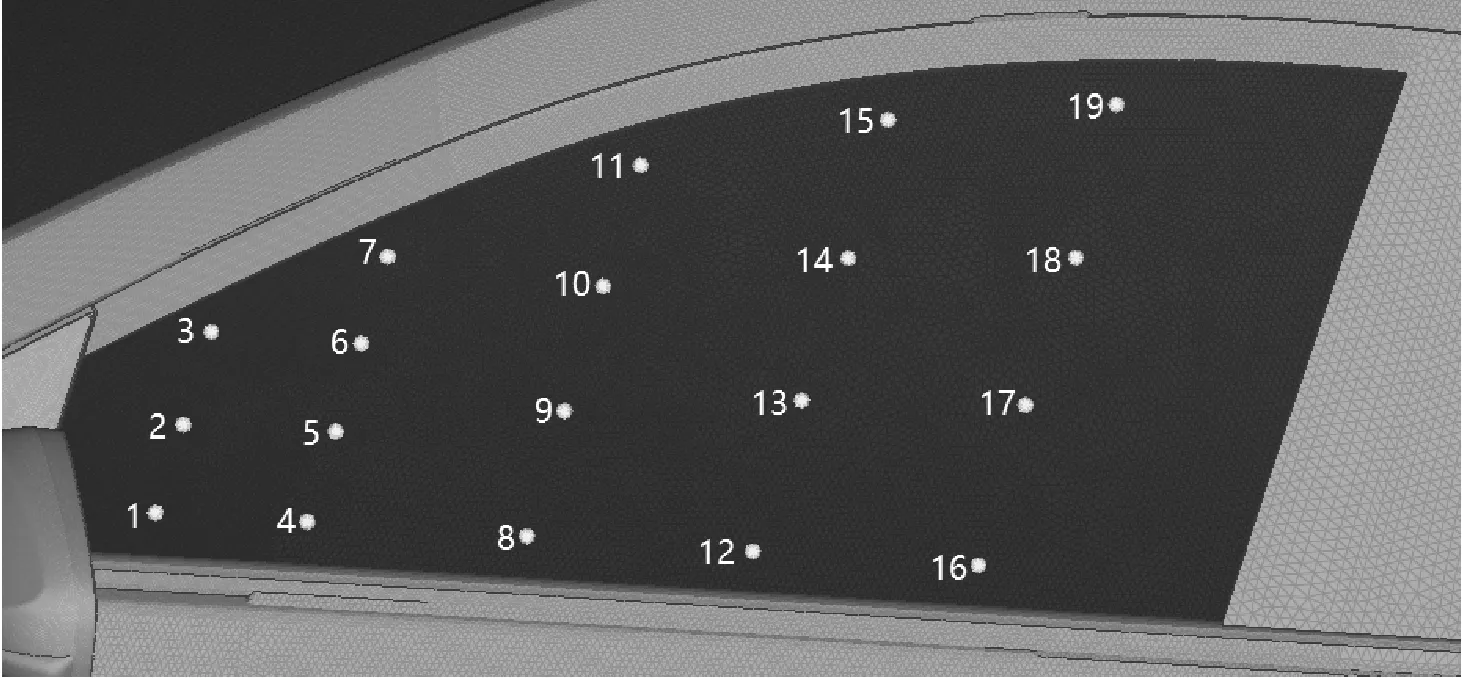
图3 侧窗测点
表1给出侧窗表面19个测点的总压力级.试验测点的总压力级最大为128.8 dB(A),最小为113.3 dB(A);仿真测点最大为132.8 dB(A),最小为114.7 dB(A).试验与仿真总压力级相差2.0 dB(A)以内的一共有13个点,约占总测点的70%.侧窗19个测点能量平均总压力级的试验和仿真值分别为122.7 dB(A)和125.0 dB(A),两者相差仅2.3dB(A).

表1 侧窗表面总压力级对比
图4为侧窗表面能量平均压力级频谱.从图4中可以看出,全频带上仿真和试验的趋势相同,量级相差不大,最大偏差小于3.0 dB(A),表明本文建立的仿真方法具有较高的精度.

图4 侧窗表面测点能量平均压力级频谱
3 主动射流降噪
3.1 主动射流模型
分别在后视镜镜片与镜框的缝隙处I、后视镜镜框边缘处O以及后视镜底座中间P部署主动射流口,如图5所示.位置I、O和P的喷口宽度分别为3.7、3.0和4.2 mm,面积分别为18.5、25.6、4.4 cm2.根据各射流口位置和所处流场给定不同射流速度和方向,共完成了11个射流工况的仿真计算.其中,“+x”代表射流方向沿着x轴正向,“法向”代表射流垂直射流口向外喷气,“+45°”和“-45°”分别代表射流沿着x,y正半轴夹角45°(吸气)和x,y负半轴夹角45°(吹气)方向.

图5 射流位置
为了提升计算效率,加快有效射流参数寻找,基于整车仿真模型,建立后视镜区域的子域模型,如图6所示.具体范围[-0.30~2.20,-1.50~0,0.36~1.70] m.采用STAR CCM+对子域生成Trimmer+layer的体网格,在子域壁面生成总厚度为0.5 mm的边界层网格,网格层数为8层,增长率为1.1.在后视镜区域设置网格加密区.加密区的体网格间距为2.5 mm,子域其他体网格间距为5.0 mm,共计生成总体网格数为850万个,约为整车的1/8.

图6 子域
子域所需的流场边界条件由整车提供.每个子域边界平面输出了速度分量、压力、湍动能和湍流耗散率等物理量.子域所有计算方法与整车相同,不再赘述.
3.2 射流降噪与最优射流方案
表2为通过子域方法计算得到各射流工况下,前侧窗表面所有网格节点的能量平均的总声功率级和湍流脉动总功率级.总声功率级初始值为86.4dB(A),湍流总功率级初始值为118.1 dB(A),速度为140 km·h-1时,总声功率级最大为88.9 dB(A),最小为85.1 dB(A);湍流脉动总功率级最大为120.9 dB(A),最小为117.2 dB(A).多数有效射流方案在降低总声功率级的同时也降低了湍流脉动总功率级,但湍流脉动总功率级降幅小于总声功率级降幅.例如,射流位置O,法向射流速度为20 m·s-1,总声功率级降低1.3 dB(A),但湍流脉动总功率级仅降低0.2dB(A).可见,射流降噪更多改善空间涡流分布,降低涡流强度,从而减弱涡流产生的声场.

表2 射流降噪
对于射流位置O,当速度低于20 m·s-1时,无论是沿着x轴正向还是垂直于射流表面,总声功率级降幅为0.4~1.3 dB(A).然而,速度为25 m·s-1时,总声功率级却增加了2.5 dB(A).射流位置I的降噪效果不如射流位置O,当法向射流速度从10 m·s-1上升到15 m·s-1时,总声功率级的降噪从0.2 dB(A)增加到0.5 dB(A).然而,当法向射流速度为5 m·s-1时,总声功率级反而增加0.1 dB(A).与射流位置O相比,处于后视镜镜片与镜框间的位置I距离后视镜尾涡更远,相同射流速度的降噪效果稍差.为了达到相同降噪效果,需要更大的射流速度.对于射流位置P,尽管射流能改善湍流脉动总功率级,但总声功率级改善不明显,采用吹气反而使总声功率级增加1.0 dB(A).
综合所有射流方案发现,以总声功率级为主要参考确定最优射流方案为:射流位置为O,法向射流速度为20 m·s-1.最优射流方案能使前侧窗表面总声功率级降低1.3 dB(A),湍流脉动总功率级降低0.2 dB(A).
3.3 最优射流方案的整车验证
将最优射流方案添加到整车气动噪声仿真模型中,按照原仿真方法和流程完成最优射流方案的整车验证.分别计算前侧窗表面所有网格节点能量平均的总声功率级和湍流脉动总功率级,可以发现,最优射流方案能使总声功率级降低1.8 dB(A),湍流脉动总功率级降低0.3 dB(A),降噪效果明显.由此可见,通过子域方法寻找最优降噪方案可行且有效.
图7给出了最优射流方案和原始模型的后视镜中截面流线和压力的对比.从图7中可以发现,在最优射流方案控制下,尾涡进一步向后延展,涡核位置向下游移动.后视镜尾部的时均压力有所增大,压力梯度有所降低,进而降低了尾涡区的压力脉动,减小了气动噪声的产生.

a 原始模型

b 最优射流方案
4 结论
建立了整车气动噪声仿真模型,使用大涡模拟和声扰动方程求解得到非定常流场和声场.通过对比前侧窗表面的19个测点总压力级和频谱发现,它们的能量平均仅相差2.3 dB(A),其中有13个测点总压力级相差小于2.0 dB(A).测点压力级频谱变化趋势相同,量级相差较小,表明数值计算方法的正确性.
引入主动射流控制新技术,针对后视镜结构和流场特点,建立子域气动噪声仿真模型,通过对比不同位置、方向和速度大小发现,最优射流方案为:后视镜镜框边缘处O,采用法向射流速度20 m·s-1.将最优射流方案置于整车气动噪声仿真模型中,通过与原始模型相比较发现,整车气动阻力系数减少0.002,前侧窗表面总声功率级降低1.8 dB(A),湍流脉动总功率级降低0.3 dB(A).
应该指出的是,受计算资源和时间限制,尽管主动射流方案数量有限,但降噪效果仍然显著.更多的方案数量和非定常主动射流可能会有更加显著的降噪效果,这些都值得后续进一步研究.
猜你喜欢
电力电容器与无功补偿(2022年4期)2022-08-20
噪声与振动控制(2022年4期)2022-08-19
中国特种设备安全(2022年3期)2022-07-08
中国新闻周刊(2017年21期)2017-06-15
汽车零部件(2015年8期)2015-06-23
舰船电子工程(2015年5期)2015-03-14
汽车科技(2015年1期)2015-02-28
舰船科学技术(2015年8期)2015-02-27
汽车与新动力(2015年1期)2015-02-27
客车技术与研究(2014年6期)2014-02-28