一种利用半主动制导武器进行协同防空的验证方法
2019-08-21 08:44刘丽龙隋大鹏陈世豪高王升
指挥控制与仿真 2019年4期
刘丽龙,刘 钊,隋大鹏,陈世豪,曹 杰,高王升
(上海机电工程研究所,上海 201109)
随着科技的进步和军事技术的发展,反舰导弹和先进作战飞机逐渐被世界上较多国家所拥有,水面作战舰艇面临的作战环境日益严苛,特别是在以超声速反舰导弹、隐身作战飞机、先进无人机等为代表的空中武器及平台打击下,往往需要同时应对敌方的超低空突防、隐身攻击、视距外饱和打击、电磁干扰等一系列复杂环境,舰艇独立反制空中目标打击能力面临严峻挑战[1-3]。因此,需要借助编队综合探测和空中预警支援信息,研究编队防空武器协同拦截反导技术,实现对来袭目标的协同探测,尽远打击,提升单舰在编队协同护卫下的战场生存能力。
1 协同防空作战优势分析
1)提高舰艇对抗敌方进攻扇区内的抗饱和攻击能力
现代海上作战模式下,进攻方一般会在舰艇编队某个方向发起进攻,而舰艇编队利用远程信息支援,可提前若干时间获得敌情,按照目标来袭扇面方向进行舰艇机动合理布阵,采取最有利角度、最多火力通道数量、按照防御距离远近梯次进行软硬武器拦截。

图1 菱形编队防导作战分析
本文以四舰组成的菱形编队为例,在实际航渡过程中,若A舰在某个时间段在某扇区遭受敌方反舰导弹饱和攻击时,可请求编队中具有空闲火力通道的舰艇进行火力支援,对抗来袭的饱和攻击目标。
2)提升舰艇对抗电磁干扰能力
现代海战环境下,敌方发起攻击时通常会对舰艇编队实施一定的电磁干扰,比较典型方式为在连续来袭的反舰导弹中夹杂一枚携带弹载有源干扰的反舰导弹,掩护前后的同伴,造成局部扇区“致盲”如图2所示。

图2 雷达画面掩护式干扰扇区
从图2可知,弹载随队掩护式干扰在目标雷达舰艇上形成干扰扇区,造成目标舰艇丧失在来袭方向上的探测能力,进而丧失拦截能力。
由于随队式弹载干扰具有一定的方向性,使得其无法覆盖舰艇编队所有舰艇,因而利用编队协同探测信息,未受干扰的B舰将目标数据通过数据链传递给A舰,A舰可对干扰方向进行防空拦截。
3)弥补单舰防空探测盲区,拓宽防空拦截纵深,增加拦截次数
典型反舰导弹在进攻过程中一般采用超低空突防模式,掠海飞行,借助地球曲率规避舰艇雷达探测,同时,对低空目标的发现距离还受至于雷达在舰上的架高,根据式(1)计算
(1)
式中,D为雷达与目标视距(m);H为舰载雷达天线架高(m);h为目标的飞行高度(m)。

图3 视距受地球曲率影响示意图
如图3所示,假定目标飞行高度为15 m,雷达天线架高25 m。通过公式计算,舰载雷达与目标的理论视距约为36.55 km,实际条件下,受海杂波等环境因素影响,对15~30 m高反舰导弹雷达发现距离约要近一些。即使舰空导弹能够在更远的距离对来袭低空目标拦截,但仍然会受雷达的视距影响不能发挥最大作战效能,甚至出现由于发射距离过近,丧失二次拦截补射的机会,严重压缩了单舰防御纵深。
在舰艇编队协同方位过程中,一是可以利用布阵优势,前出哨舰为后方舰艇编队弥补低空探测盲区,拓宽防御范围,提高对高威胁目标的拦截次数;二是后方舰艇利用哨舰协同探测信息或空中支援信息为前方哨舰提供火力支援,提高哨舰的多目标拦截能力;三是为后方编队进行战术指挥、调整、实施赢得时间。
2 协同防空关键技术
舰艇编队协同防空是一项复杂的系统工程,涉及到目标探测、信息传递、数据处理、导弹制导控制、编队指挥流程等多个方面。
1) 信息融合技术
舰艇编队协同制导防空需要对多平台,多传感器,多指挥、制导系统的数据信息进行融合,涉及多传感器的大批量目标信息的综合处理,主要包括:①多传感器之间的时空修正技术,即对不同位置传感器发来的目标信息转换到统一的坐标系下,并补偿数据传递的时延;②目标同一性识别技术,即对不同传感器探测的目标信息进行一致性识别,剔除重复目标,建立目标唯一的航迹信息;③目标数据的压缩与差值,滤波和融合,生成编队统一的目标态势图。
2) 多雷达组网技术
水面舰艇编队中,一般配置不同频段、不同体制的多型雷达协同工作,用于提高对低小慢目标、隐身目标、高速大机动目标探测和跟踪能力,以及舰艇编队的抗干扰、抗摧毁能力。多雷达组网研究的关键技术包括多雷达点迹融合技术,多雷达组网动态组合及控制技术,多雷达协同探测、目标识别、辅助制导技术,多雷达协同干扰源交叉定位技术等。
3) 协同防空总体技术[4]
协同防空总体技术涉及舰艇之间协同探测跟踪、数据共享、发射控制、导弹制导等多个方面,需要综合目标态势,对编队进行协同防卫。通常情况下,只有具备远射程、大捷径、特定制导模式的导弹才能实现协同防空,在编队应用中一般采用以下几种模式:①A舰探测、B舰发射、B舰制导;②A舰探测、B舰发射、A舰制导;③A舰探测、B舰发射、B舰制导、A舰接力制导。
3 协同防空制导回路海上校飞验证
本文以半主动制导武器为例,验证A舰探测,B舰发射,B舰制导的可行性,主要验证以下两方面的内容:一是协同探测数据链路传输的时延误差和精度误差;二是半主动制导武器制导回路对目标的跟踪稳定性[5-6]。
实际海上校飞验证试验态势如图4所示。试验过程中,A舰和B舰纵距约10 km,靶机(加装真值测量设备)飞行高度约200 m,A舰为探测舰,负责对目标的探测跟踪,并将目标位置通过数据链传输给B舰,B舰为发射制导舰,利用A舰发送过来的目标数据进行解算,并模拟发射导弹,对跟飞电子舱进行制导控制,检验对目标的跟踪情况。
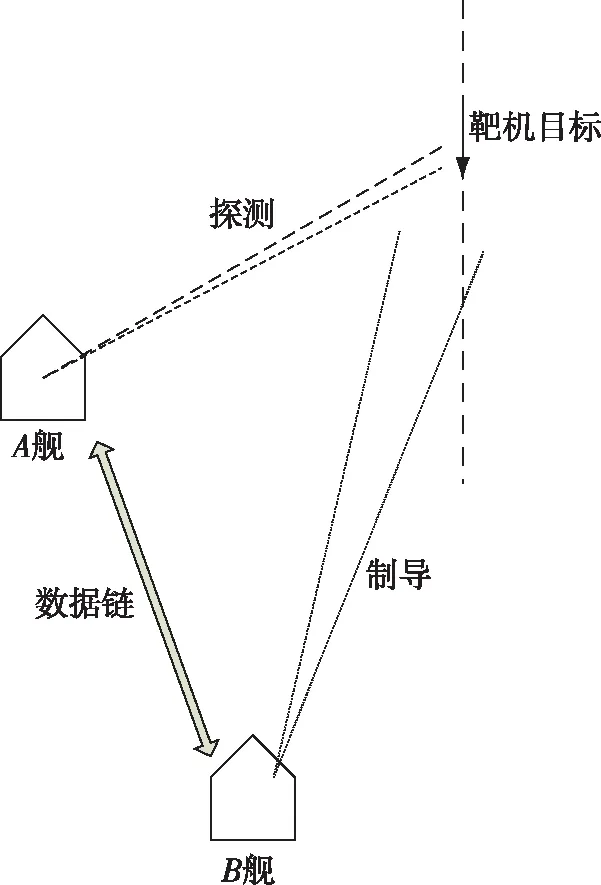
图4 海上校飞验证态势图
1)验证项目一
实施条件:靶机从距离B舰30 km外进入,从B舰右前方约50°方向进入,航捷约6 km,航速约8 kn,A、B舰等速直行。
在该试验条件下,A舰雷达目标跟踪数据经过舰艇间数据传输链路发送给B舰,B舰对接收的数据经过坐标系变换、时间修正(时延补偿)以及数据处理后发送给半主动武器武控系统解算。上述数据处理过程中,以靶机加装设备测量为真值,以B舰收到的目标数据完成数据处理后为测量值,处理结果如图5、6所示。
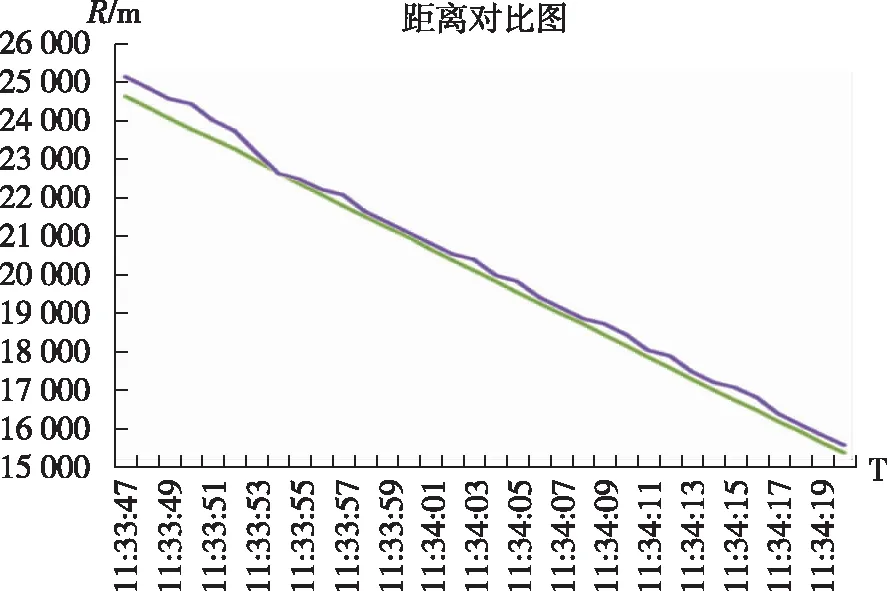
图5 距离对比图
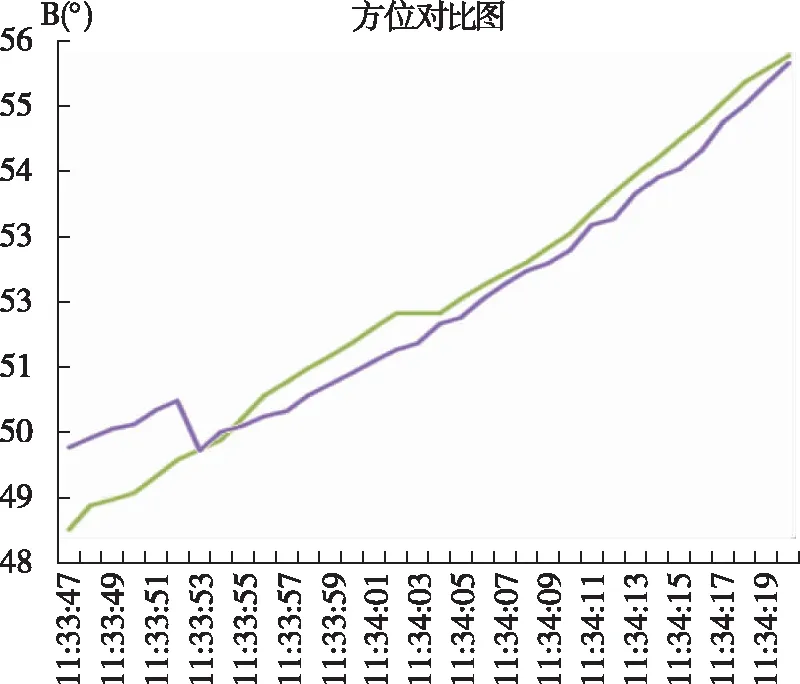
图6 方位对比图
上两幅图中,绿色线为目标真值,紫色线为测量值。
从距离图上可以看出,经过数据处理后的目标跟踪距离与真值一致性较好,初始阶段距离误差略大,测量值在真值上方,两者有较明显误差,随着靶机进入航路稳定,数据积累一段时间后,经过时延和数据处理的测量值与真值近乎贴合。
从方位图上看,在初始阶段测量值方位误差较大,但与距离对比图基本保持一致,整体看方位误差始终处在收敛的趋势范围内[7]。
2)验证项目二
实施条件:模拟真实导弹的电子舱设备架设在B舰舰艏,舱体为固定状态,为避免目标进入过程中回波接收天线限位卡死,电子舱朝向右舷约45°方向,通过喇叭接收制导照射直波信号。
B舰收到A舰发送的数据处理完成后发送给武控系统,武控解算后向跟飞电子舱装订目标数据,并引导制导雷达对准目标,模拟发射后电子舱接收机开机,搜索回波信号,制导雷达对目标进行照射,跟飞电子舱截获目标信号后对目标进行连续跟踪,检验制导回路跟踪的稳定性,结果如图8-10所示。
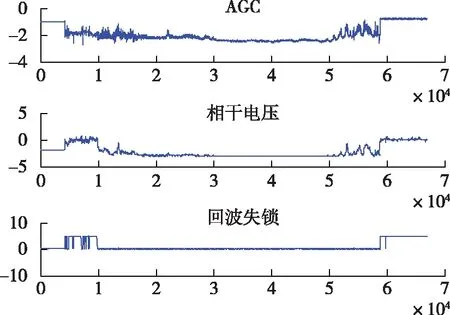
图7 电子舱目标截获信号允许目标截获信号
从跟飞结果可以看出,在回波失锁(允许截获)信号出现后,AGC信号跌落,电子舱开始跟踪目标;在全程跟飞过程中,电子舱跟踪目标的方位角和高低角度数据与系统向电子舱装订的数据基本一致,并随着跟踪逐渐稳定,两者之间的角度误差趋于0。表明:利用协同探测数据,半主动制导武器能够引导制导雷达对准照射目标,跟飞电子舱能够正确搜索截获目标信号,并稳定跟踪,制导回路可以消除协同探测新增时空修正误差的影响。

图8 位标器俯仰和偏航误差

图9 方位和高低跟踪角度

图10 电子舱跟踪角度误差
4 结束语
本文基于半主动制导武器在A舰探测、B舰发射、B舰制导的方式下,验证了编队协同防空的可行性。同理,可对A舰探测、B舰发射、A舰制导; A舰探测、B舰发射、B舰制导、A舰接力制导;以及主动制导、指令制导等不同体制的武器设计海上校飞试验,进行制导回路验证,验证武器协同防空能力。
猜你喜欢
凤凰动漫(军事大王)(2022年3期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
军事文摘(2021年21期)2021-11-14
北京航空航天大学学报(2021年6期)2021-07-20
中国新技术新产品(2020年19期)2020-12-25
兵器知识(2017年10期)2017-10-19
航空知识(2001年5期)2001-06-12