高精度光纤陀螺响应角加速度能力研究
2019-08-21 08:44张博文戴之光
指挥控制与仿真 2019年4期
张 昕,张博文,戴之光,朱 政
(中国船舶工业系统工程研究院,北京 100094)
海洋环境在70%左右的时间都存在大小不同的波浪,影响着舰船的运动。在通常情况下,波浪极其不规则,其波高、波长和周期都是时间的随机函数[1]。舰船的摇摆运动也是不规则的,一般情况下可以由若干个幅度不同、频率不等的波浪的简谐运动叠加来描述[2]。
光纤陀螺仪作为一种重要的惯性传感器,具有成本低、精度高等优点。光纤陀螺仪工作时通常固连到船体上,用于测量船体的姿态角和角速度,船体的摇摆运动会使光纤陀螺处于角加速运动状态,此时Sagnac反馈相移具有复杂的形式,它将严重影响系统的恢复平衡时间和精度[3],因此,光纤陀螺仪能够正常响应角加速度是一项重要的设计指标,特别是高精度光纤陀螺通常采取过调制进行噪声抑制,会减小带宽,进一步对光纤陀螺的响应角加速度能力产生影响,所以在光纤陀螺进行方案与基本参数设计时,需要考虑分析光纤陀螺的响应角加速度能力。本文首先对光纤陀螺角加速度响应能力进行深入的机理分析与理论推导,然后,采用光纤陀螺角加速度响应能力动态测试方法,对光纤陀螺响应角加速度值和输出饱和时角加速度值进行实验研究。
1 光纤陀螺响应角加速度能力机理分析
1.1 数字闭环光纤陀螺的动态数学模型
干涉型光纤陀螺由一个环形双光束干涉仪组成。由于光纤陀螺相对惯性空间转动,两束相反方向传输的光波间产生Sagnac相移,从而,引起两束光之间干涉光强发生变化。利用光电探测器(PIN)检测出这一光强变化,将其转换为电流的变化,就可以得到Sagnac相移和载体旋转角速度[4]。
干涉型光纤陀螺前向通道中,Sagnac效应简化为比例环节K1,探测器和前置放大器简化为比例环节K2,调制环节综合为一个比例滞后环节K3Z-1;在反馈通道中,D/A转换、后置放大、相位调制表示为一个比例微分过程K4(1-Z-1),系统电路延迟用一个k阶滞后环节Z-k表示,得到的简化后闭环控制动态模型如图1所示[5]。
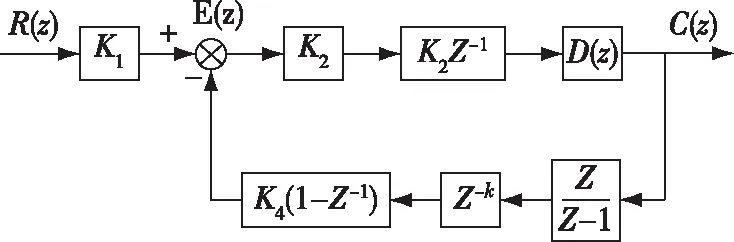
图1 简化后闭环控制动态模型图
计算简化后闭环控制动态模型可得到系统闭环传递函数为

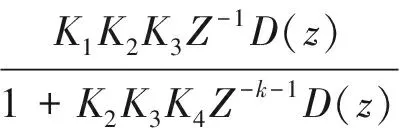
(1)
为了分析系统的动态特性,将系统传递函数从z域转换到s域,表达式为
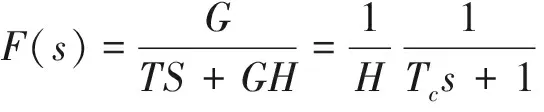
(2)
1.2 响应角加速度能力对光纤陀螺的影响
一般情况下,光纤陀螺即使存在角速度过大情况下,其输出幅度受到影响,但不会引起光纤陀螺闭环控制回路失效,在大角速度输入撤销的情况下,可以恢复到正常输出。但是高精度光纤陀螺通常采取过调制进行噪声抑制,在干涉型光纤陀螺结构中,其输出干涉信号信噪比SNR关系式为

(3)
其中,φm为偏置波形的相位幅值。由式(3)可见,当φm=π时,控制系统有最佳信噪比;但是,由于光电检测器还有散粒噪声、热噪声以及放大器噪声,使得在φm=π时不可能获得最佳结果,不过此时最佳工作点非常接近π。
可见光纤陀螺随机游走系数与光纤陀螺偏置工作点相关,采用过调制技术的偏置工作点,可获得很高的信噪比。高精度光纤陀螺一般采取7/8π偏置深度的过调制噪声抑制技术,因此会减小光纤陀螺带宽,进而响应角加速度响应能力。
光纤陀螺测量Sagnac相移范围为±π,采用方波调制,通过对探测器输出信号和调制信号进行相关检测,解调出相位误差信号,从而,解算出陀螺的角速度信息,如图2所示,对应陀螺在静止和转动时的探测器输出,陀螺在静止时,探测器输出为直流信号。相关检测得到误差信号为零,当陀螺存在检测时,探测器输出方波信号,通过检测奇偶态之间的电压值,计算得到陀螺的转动Sagnac相移信息。

图2 正常工作时探测器输出图
当对光纤陀螺施加大角速度时,光纤陀螺快速敏感到较大Sagnac相移,经过多次反馈后,解调得到的反馈相移也会和Sagnac 相移一样大,而此时当光纤陀螺突然停止,出现大角加速度,光纤陀螺敏感到的Sagnac相移瞬间变为零,但是解调得到的反馈相移依然存在,导致光纤陀螺的探测器会敏感一个较大的光功率,光电探测器输出饱和,如图3所示。
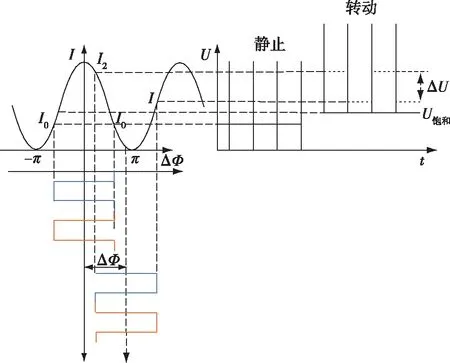
图3 大角加速度输入时探测器输出图
1.3 光纤陀螺响应角加速度能力推导分析
本文以闭环控制动态模型为基础,采用方波调制,偏置深度为7/8π,光电探测器输出电压选取为Vm(t),对光纤陀螺响应角加速度能力进行推导。光电探测器输出电压与接收光功率关系为
E=0.46P-1.6
(4)
式中,E为探测器输出电压(V);P为探测器接收到的光功率(uW)。
闭环光纤陀螺探测器的响应函数如下
(5)

光纤陀螺饱和输出时,探测器饱和电压为V0,当探测器的工作点为Vm(t)时,

(6)

(7)

(8)
2 光纤陀螺响应角加速度能力测试方法
本文采用的光纤陀螺响应角加速度能力测试方法是基于光纤陀螺在实际应用中载体摇摆状态的特点,利用三轴测试转台模拟载体,提供光纤陀螺在摇摆状态下的输入角速度与角加速度,测试转台的机械台体如图4所示。实验测试时把光纤陀螺和加速度计安装在机械台体上,由控制机柜控制机械台体运动,光纤陀螺角加速度能力测试系统如图5所示。

图4 三轴测试转台实物图
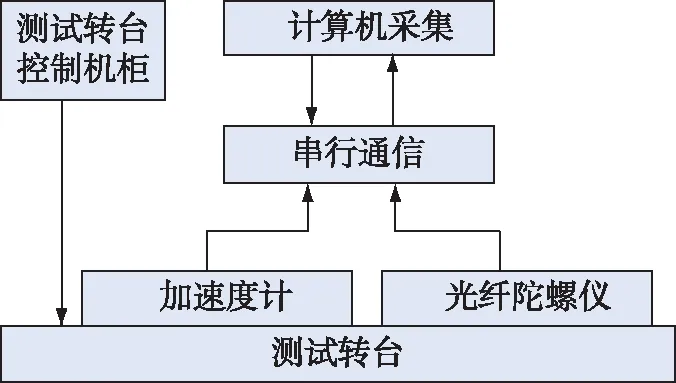
图5 测试系统示意图
选用实验用高精度光纤陀螺开展动态测试实验,将光纤陀螺仪和加速度计通过夹具安装到测试转台,光纤陀螺的敏感轴垂直于测试转台[6],测试转台控制机柜设定摇摆频率f值见表1。

表1 转台测试频率
启动测试转台,依次按照上述表1工作频率进行动态测试[7],采用串行通信模块采集光纤陀螺仪的输出值,串行通信模块采样周期为2 ms,光纤陀螺仪输出为[8]
Ωf(t)=Ωi·sin[2πfi(t-t0)]
(9)
式中,ΩA为角振动幅度,Ωi为输出信号的幅度。
加速度计的输出可近似表示为测试转台的角速度,即光纤陀螺的输入
Ω(t)=ΩAi·sin(2πfit)
(10)
式中,Ωi为光纤陀螺输出信号的幅度,t0为延迟时间。
由上式可得陀螺仪在频率fi,下的幅值增益Gi如下
(11)
测试转台的工作频率点选取为10 Hz,将测试转台的摆动幅值从0.05°开始,以0.05°的幅度依次增加,并将摆动幅值改变后的测试数据代替原始数据,计算得出光纤陀螺在频率为10 Hz时的幅值响应情况,测试得到当幅值增加到0.405°时,光纤陀螺的幅值响应正好衰减为-3 dB,此时光纤陀螺幅频曲线如图6所示。
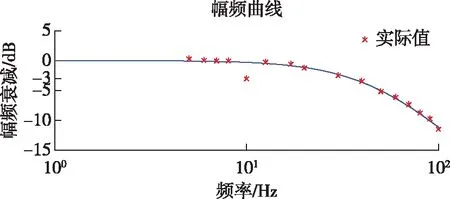
图6 光纤陀螺幅频曲线(改变10 Hz的幅值)
转台的摇摆运动可以用正弦形式来描述,光纤陀螺角位置表达式为
P=A·sin(2πft)
(12)
对上式求导得到角速度表达式
w=2πft·A·cos(2πft)
(13)
再次求导,得到角加速度表达式
α=(2πft)2·A·sin(2πft)
(14)
由上式可得到光纤陀螺的抗角加速度值为
α=Aω2
(15)
式中,α为光纤陀螺抗角加速度值,ω=2πf为摆动圆频率,A为摆动幅值。
光纤陀螺在频率为10 Hz时,振幅为0.405°输出波形,此时幅值衰减至-3 dB,光纤陀螺输出形式为正弦函数,即光纤陀螺还能够响应测试转台的输入,但是输出幅值已经有所衰减,如图7所示。由测试结果,以及根据式(15)可得出光纤陀螺抗角加速度值约为1 598°/s2。
为确认本型光纤陀螺所能响应的最大角加速度,将测试转台在10 Hz工作频率下的幅值继续增加,直到光电探测器输出饱和,光纤陀螺无法正确响应测试转台的输入,输出呈积分形式,最后稳定在某一值,如图8所示。得到此时的幅值约为0.65°,由测试结果,根据式(15)可得到光纤陀螺仪的最大角加速度响应能力约为2 566°/s2。
由上述实验结果可知,当船体的摇摆运动使得实验用高精度光纤陀螺敏感的角加速度值小于2 566°/s2时,无论光纤陀螺敏感的角速度多大,光纤陀螺闭环控制系统不会出现失效,当实验用高精度光纤陀螺敏感的角加速度值大于等于2 566°/s2时,光电探测器输出饱和,光纤陀螺无法正确响应测试转台的输入。
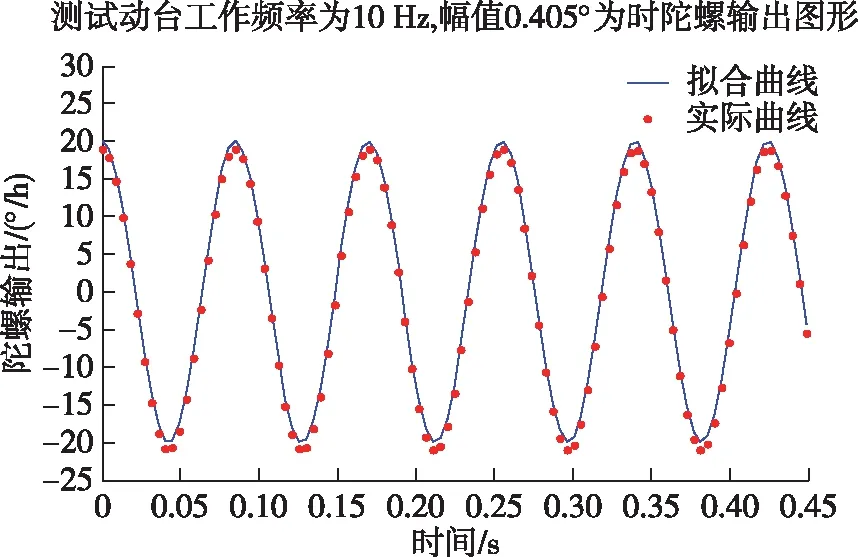
图7 频率10 Hz,振幅0.405°时输出
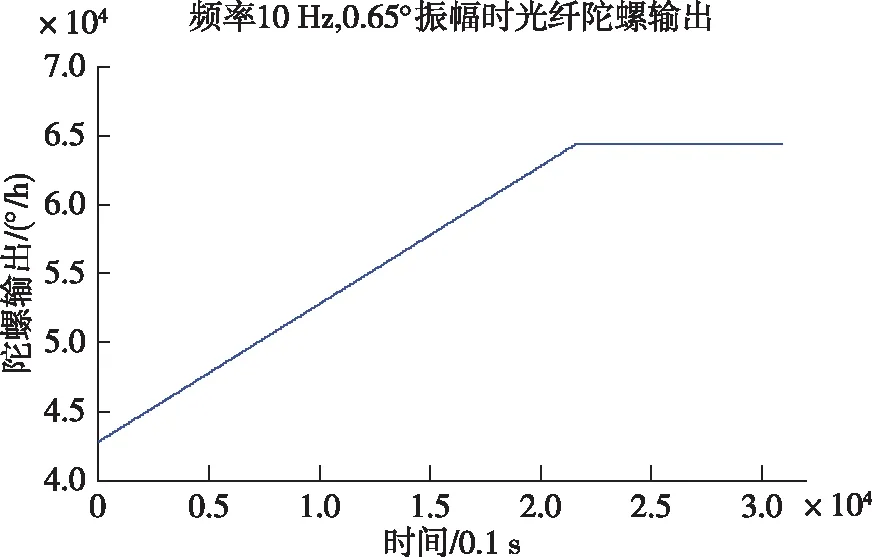
图8 频率10 Hz,振幅0.65°时输出
为了验证不同光纤陀螺输出饱和时角加速度值是否具有一致性,采用两只相同参数的光纤陀螺开展上述性能测试,具体结果见表2。

表2 两只相同参数的光纤陀螺响应角加速度测试结果
由表2可知,测试的两只光纤陀螺响应角加速度和输出饱和时角加速度两项设计指标具有一致性,不同光纤陀螺测试结果没有明显差异。
3 结束语

猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2022年5期)2022-06-06
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
北京航空航天大学学报(2021年9期)2021-11-02
导航与控制(2019年2期)2019-06-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02