
基于振动信号的齿轮泵故障诊断
2019-08-27 07:33何庆飞陈小虎王旭平喻春明
噪声与振动控制 2019年4期
何庆飞,陈小虎,王旭平,喻春明,张 宁
(1.西京学院 机械工程学院,西安 710123; 2.火箭军工程大学 作战保障学院,西安 710025)
液压泵是液压系统的核心,对其进行状态监测和故障诊断是确保液压系统安全和可靠运行的重要举措。基于振动信号的液压泵故障诊断是常用的故障诊断方法之一。由于测试环境温度的变化会造成仪器的零点漂移,导致原始信号中含有长周期趋势项[1-2],文献[3-4] 对振动信号的趋势项去除方法进行了研究。液压泵的振源较为复杂,除去自身的机械振动外,还有油液冲击振动和电动机耦合振动等,因此采集的信号含有噪声干扰。为有效抑制干扰信号的影响,提高信号光滑度,需要对采集的信号数据进行平滑预处理。文献[5-6] 研究了信号平滑处理方法,经实例验证有效可行。很多学者对故障特征信号的提取方法进行研究,文献[7] 研究了基于峭度时域特征提取方法,文献[8-9] 研究了基于小波包和经验模态分解频域特征提取方法。支持向量机是故障诊断的重要方法之一,文献[10-11] 研究了支持向量机模式识别算法。
本文以齿轮泵为例,研究不同故障状态下各监测参数的变化情况,采集各状态下的振动信号,首先对采集信号采用多项式最小二乘法去除采集振动信号的趋势项,再采用五点三次平滑法对信号进行平滑预处理,然后分别提取基于峭度液压泵时域特征、小波包能量特征和经验模态分解特征,最后采用最小二乘支持向量分类机(Least squares support vector classification,LS-SVC)建立故障诊断与模式识别模型,进行状态识别。
1 基于马氏距离的传感器通道选择
对齿轮泵不同工况下的运行状态采集了3个通道振动信号,为选取最佳的传感器通道振动信号进行特征提取与故障诊断,提出了基于马氏距离的传感器通道选择方法。
马氏距离是Mahalanobis于1936年提出,用来描述数据的协方差距离测度。马氏距离的大小,可用来表征两个样本之间的相似度,两个样本的马氏距离越小,样本间相似度越大;反之,说明样本间相似度越小。样本xi与xj之间的马氏距离为

其中:V为样本xi与xj所在总体的协方差矩阵。
样本xi与总体G之间的马氏距离为

其中:μ为总体G的均值,V为总体G的协方差矩阵。
对于多个总体的判别,分别依据式(2)计算样本至各个总体的马氏距离,并依据马氏距离的大小进行判别。在马氏距离判别方法的基础上,提出传感器通道选择方法。
测试样本集Y1中的样本yj类别判别公式为

其中:μi,i=1,2,3分别为总体G11、G12、G13的均值,V为总体G11、G12、G13组成的数据集总体协方差矩阵。
2 振动信号预处理
振动信号预处理是为了在数据分析前降低采集的信号数据中各种噪声的污染,提高信噪比,以提高后续特征提取和故障诊断的精度。文中主要利用趋势项消除和平滑预处理对采集的齿轮泵振动信号进行预处理。
2.1 趋势项消除
消除信号趋势项是信号预处理的一项重要内容,论文采用多项式最小二乘法消除信号的趋势项。
加速度传感器采集的振动信号数据为{xk}(k=1,2,…,n),采用m阶多项式拟合数据序列xk,即

依据最小二乘法原理,确定系数aj(j=0,,1,…,m),使得xk和x^k之间的误差平方和最小,即

E有极值的条件为E对ai偏导为零,即

分别对系数ai(i=0,1,…,m)求偏导,可得m+1个线性方程,可表示为

当m=0时,方程式(7)的解为
趋势项为常数,消除常数趋势项计算公式为

当m=1时,方程式(7)的解为

趋势项为线性趋势项,消除线性趋势项计算公式为

当m≥2时,设定的趋势项为曲线趋势项,通常取m=1~3对采样信号进行多项式趋势项消除。
2.2 平滑预处理
为有效抑制干扰信号的影响,提高信号光滑度,需要对采集的信号数据进行平滑预处理。文中采用五点三次平滑法对采集的信号进行平滑预处理。
五点三次平滑法是基于最小二乘法原理对离散信号数据序列进行三次最小二乘多项式平滑的方法,计算公式为

式中:i=3,4,…,m-2。
3 故障诊断和模式识别
论文采用LS-SVC建立故障诊断与模式识别模型。LS-SVC是在SVM基础上的一种改进学习方法,运用二次损失函数,将SVM中的二次规划问题转化为对线性方程组的求解,在保证精度的同时降低了算法的计算复杂度,在故障诊断、模式识别等邻域得到了广泛的应用。LS-SVC的原始问题是凸二次规划,即

引进记号

二次规划的对偶问题为

求解式(14)所示的最优化问题,求得决策函数

其中:g(x)表达式为


图1 液压齿轮泵故障诊断流程图
在应用LS-SVC方法对提取的振动信号故障特征进行训练和模式分类时,选用高斯径向基函数作为核函数。由于液压齿轮泵的故障模式有多种,因此需要构建多个两类分类机解决多类分类问题;按照介绍的成对分类方法,构建多类分类机,并依据成对分类样本类别判定规则对测试样本进行类别判别;对于用判定规则无法判定的样本即拒识域内的样本,采用基于Fisher判别分析的拒识域识别方法进行判别,通过对拒识域内样本的识别,提高算法的泛化性和鲁棒性。液压齿轮泵故障诊断流程如图1所示。
4 实验验证
在实验室针对CB-KP63齿轮泵进行试验,所采用的传感器是PCB公司的608A11型ICP加速度传感器,采集卡为UA302H型16位A/D,采样频率为20 kHz,采集软件为实验室自主研发的液压泵在线状态监测与故障诊断系统,试验是在油液温度为25℃~45℃之间和工作压力为5 MPa条件下进行。在齿轮泵的垂直径向(1#测点)、水平径向(2#测点)和轴向(3#测点)安装了3个加速度传感器测量泵壳振动情况,其中2#测点靠近泵的出油口,3#测点位于齿轮泵端面靠近被动轴轴承,传感器测点布置如图2所示。

图2 振动传感器测点布置图
在实验中设置了气穴故障、齿轮磨损、侧板磨损、轴承故障4类故障,其中,采样频率为20 kHz,每组样本的采样点数为4096。
4.1 传感器通道选择
采集各通道振动信号各40组,计算各组振动信号的时频域参数,并定义不同通道的传感器振动信号状态参数集为X1、X2和X3。对于传感器通道1,从状态参数集X1中随机选取不同状态各20个数据样本分别组成总体G11、G12、G13,剩余不同状态各20个,共60个数据样本组成测试样本集Y1。
对于传感器通道2和传感器通道3,均采用上述方法对测试样本集Y2和Y3中样本进行判别。判别结果如表1所示。
由表1可知,基于马氏距离的类别判别方法对传感器通道1的振动数据误判率最小,对传感器通道2和传感器通道3的误判率较高。
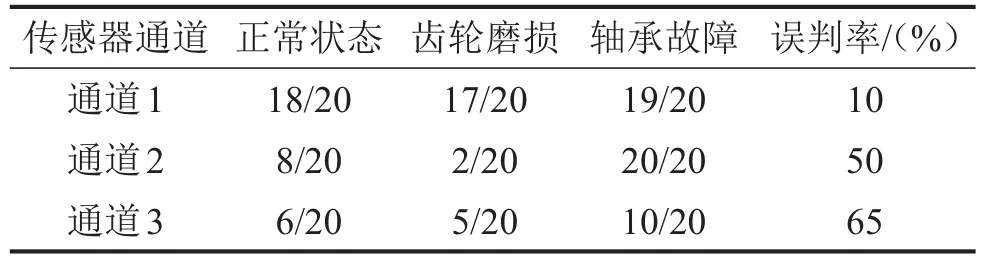
表1 测试样本类别判别结果
通过分析齿轮泵的振动源可知,齿轮泵的机械弹性振动和主、从齿轮啮合过程中产生的振动主要集中在齿轮泵的径向方向,齿轮泵垂直方向的传感器通道1采集的振动信号强度大,信号质量高;而齿轮泵水平方向的传感器通道2由于受到油压振动噪声的污染,信号振动源比较复杂,信号污染严重;齿轮泵轴向方向的传感器通道3由于安装位置离振动源较远,信号相对较弱,特征信息微弱;经综合分析比较,选择传感器通道1采集的振动信号作为研究对象进行进一步特征提取和故障诊断与模式识别。
4.2 趋势项消除
以消除传感器通道1采集的齿轮泵正常状态振动信号趋势项为例,阶数m选为3,振动信号样本趋势项消除效果如图3所示。
图3的对比结果显示,振动信号去除趋势项前后的信号序列和对应的频谱图未发生明显的变化,说明齿轮泵正常状态下振动信号中的趋势项干扰较弱,需对所有采集的振动信号进行趋势项预处理以避免趋势项干扰对信号质量产生影响。
4.3 平滑处理
齿轮泵正常状态下振动信号样本的平滑预处理效果如图4所示。
图4(a)和图4(b)的对比显示,经五点三次平滑法处理后的信号序列的幅值和对应的频谱图发生明显变化,平滑处理后的信号噪声成分被削弱,曲线毛刺明显减少,提高了信号曲线光滑度。

图3 振动信号趋势项消除效果

图4 振动信号平滑预处理效果
4.4 故障诊断
在正常状态和4种故障模式下分别测取150组测量信号,随机选取不同状态的振动信号样本各100组作为已知状态的训练数据,剩余各50组作为未知状态的测试数据。
为验证论文提出的故障诊断方法的有效性,在对采集的振动信号预处理后分别运用基于峭度液压泵时域特征提取、小波包能量和经验模态分解特征提取方法提取特征,将提取的训练数据故障特征参数作为LS-SVC的训练样本对核函数参数进行优化选取和最佳分划超平面的构建,测试数据故障特征参数作为LS-SVC的测试样本,验证不同方法的模式识别精度。按照成对分类多类别分类机构造方法,构造10个最小二乘支持向量分类机,并对测试样本进行模式识别,分类结果如表2所示。从表中结果可得,基于EMD的振动信号状态参数提取方法效果更好,由于振源复杂性和噪声干扰的存在,导致提取的振动信号中夹杂复杂的背景噪声,直接从振动信号中提取状态参数将导致故障征兆湮没在复杂背景噪声中;经验模态分解的IMF分量携带了从低频到高频的局部特征信息,在此基础上提取的状态参数凸显原信号的局部特征信息,提高了状态参数集故障特征信息的蕴含量。

表2 基于LS-SVC多类分类器的液压齿轮泵分类结果
5 结语
(1)对齿轮泵不同工况采集3个通道振动信号,采用基于马氏距离的类别判别方法处理传感器通道1的振动数据误判率最小。因此,选择传感器通道1采集的振动信号作为研究对象。
(2)为提高齿轮泵特征提取和故障诊断的精度,先利用多项式最小二乘法消除采集振动信号的趋势项,再采用五点三次平滑法对采集的信号进行平滑预处理,有效抑制干扰信号的影响,提高信号光滑度。
(3)基于LS-SVC多类分类器的液压齿轮泵模式识别结果表明,基于EMD的振动信号状态参数提取方法效果更好。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
温州大学学报(自然科学版)(2022年2期)2022-05-30
辽宁工程技术大学学报(自然科学版)(2022年1期)2022-03-28
舰船科学技术(2021年3期)2021-04-12
潍坊学院学报(2020年2期)2021-01-18
名作欣赏(2017年32期)2017-11-28
制导与引信(2017年3期)2017-11-02
小小说月刊·下半月(2016年7期)2016-05-14
专用车与零部件(2015年12期)2015-09-20
海军航空大学学报(2015年4期)2015-02-27
