
基于有轨电车行运路口无人值守系统设计
2019-09-12 10:41杨康赵翠
智能计算机与应用 2019年4期
杨康 赵翠
摘 要:针对国内目前有轨电车轨道交通路口运行现状,设计了可替代人力指挥的智能交叉道口无人值守系统。系统核心控制模块是意法半导体(ST)公司旗下的STM32F103芯片,该芯片能够满足系统设计要求且性价比较高。系统设计使用由STM32作为核心的嵌入式线圈组成检测模块,利用扭矩电机作为机械模块。经过试验表明,该系统错误率低、稳定性强、功能完善,可实际应用于有轨电车小型交叉路口,达到取代人力的目的。
关键词:距离检测;模数转换;无人值守文章编号:2095-2163(2019)04-0060-05 中图分类号:TP277 文献标志码:A
0 引 言
由于有轨电车大多数是在原有的城市道路上铺设的行驶轨道,所以不得不面临的问题就是在各个交叉路口的交通秩序问题。在车流量多,人流量少的交叉路口采用的依然是红绿灯指挥的方法,但是对于车流量少,人流量多的小型路口的交通安全问题还有待改善。目前一个交叉路口,一般会设有2个人值班进行指挥交通工作,但是这种指挥方式,既浪费人力,又增加了运营成本,为了解决目前有轨电车沿线路口人力指挥交通的弊端,在交叉路口设置一套智能无人值守自动控制系统是很有必要的。
1 系统总体设计
本套系统综合运用了各项高新技术,提供了取代人力指挥交通的智能道口无人值守自动控制系统装置的设计方案。该系统应用于有轨电车沿线小型交叉路口,实现车来杆落、车走杆升、自动防撞、自动抓拍等功能,可以完全取代人力指挥工作。系统采用了嵌入式技术、计算机技术等物联网关键技术,并且把这些技术综合运用于一套系统中,从而保证整套系统功能的完备性和有效性。
1.1 结构设计
经过性能对比,从运算速度和片内资源考虑,最终选择了STM32芯片。本系统以STM32103ZET6作为系统的主控芯片,主要由车辆检测模块、信号模块、机械模块、报警模块等组成,整个系统的设计结构如图1所示。
1.2 功能流程
1.2.1 正常运行情况
当有轨电车驶近路口时,路口前方的车辆检测传感器检测到列车行驶,传感器发送信号至STM32微控制器,STM32微控制器根据程序设定对应输出信号,可以自动开启报警模块装置与监控模块,同时栏杆放下,并且控制与电车垂直的路口交通灯变为红灯。在电车驶离路口时,路口另一端的车辆检测传感器检测到列车行驶,传感器发送信号至STM32微控制器,控制器关闭报警模块装置和监控模块,栏杆自动升起,恢复路口的正常通行。如果检测到第一辆有轨电车通过期间又有另一辆电车驶进路口,则对第一辆电车检测到的信号反应不变,直至检测到第二辆车驶离路口的信号时再做出反应。
1.2.2 非正常运行情况
当接到有轨电车驶近路口信号时栏杆放下,报警模块会自动开启。报警模块包括红外栅栏检测装置、声光报警装置和抓拍装置。如果在此期间,检测装置检测到有人、动物或运动的物体闯进预警范围之内,为了保护行人和列车的安全,报警模块会立刻做出反应,向列车发送制动信号预警,声光报警响起进行提示,抓拍装置对路口进行抓拍,照片会自动存储上传,发送给路口附近执法人员,以便于在最短时间内做出处理措施。系统简图如图2所示。
1.3 数据分析
检测模块使用线圈型车辆检测器作为检测车辆装置,其构成为:在路面上切割出一个矩行的沟槽(尺寸为2 m×1.5 m)4个沟槽铜导体嵌入在这个沟槽中,形成埋入地下的电感线圈。该线圈是振荡电路的一部分,这个振荡信号被送到一个由单片机组成的测频电路,MCU可以测量这个振荡器的频率。其关键技术就是设计出的振荡器能够灵敏地检测出列车经过时的频率变化,稳定可靠的向控制器发送信号。
应用于有轨电车交叉路口自动控制系统对于列车的检测应满足以下要求:
(1)具有较强的灵敏度以便于在最短的时间内做出反应;
(2)具有避免相邻轨道频率干扰的解決办法;
(3)具有列车驶进线圈和驶离线圈2种可选择检测方式;
(4)具有脉冲和电平2种输出方式;
(5)具有较长时间的使用寿命。
2 线圈列车检测器的工作原理[1]
线圈列车检测器能否检测到车辆的行驶,取决于埋设在地下感应线圈的震荡频率是否变化决定的。感应线圈一直处于供电状态,当无列车经过时,线圈自感产生的震荡频率作为基准频率。当列车经过时,空间介质发生变化,从而引起震荡电路中的震荡频率发生变化,此变化信息作为列车经过此处的证实信号。
3 系统硬件设计
硬件电路设计是系统设计的核心部分,只有硬件设计合理有效,才能够保证整体系统装置正常高效的运行。此系统硬件设计主要包括基于STM32单片机的控制器模块、传感层模块、机械模块电路、报警模块等部分。接下来将对主要组成部分一一介绍。
3.1 控制器设计
在进行系统设计时,选择合适的微控制器尤为重要,STM32具有Cortex-M3内核结构,内部资源丰富,运算速度非常快,性能强劲,在价格上和其它八位机相差不大,但是其性能远远好过八位机,其时钟频率高达72M,性价比极高。具有高 性 能 、低 成 本 、低 功 耗 的突出优点。
3.2 传感层设计
传感层中的主要感测功能是耦合振荡电路,电路设计原理如图3所示。这是一个电容反馈式振荡 电 路,其 振 荡 频 率在 300 kHz左右,2个反接的4.3 V稳 压 管 使 正 弦 振 荡 信 号 限 制 在 -5 V~+5 V范围之内,耦合变压器原 副 边 匝 数 比 为l∶1[2]。P6KE12CA二 极 管 可 以 抑 制 由 静 电 引 起 的 瞬 间 电 压 影 响。正弦振荡信号经比较器LM339整形后,送至信号整形放大电路,最后输入微处理器的计数单元[3]。
3.3 报警模块
报警模块主要采用声光报警,红外对射栅栏作为检测部分。
红外栅栏(也叫“红外栏杆”)是主动红外对射的一种,采用多束红外光对射。发射器向接收器以“低频发射、时分检测”方式发出红外光,若有人员或物体挡住了发射器发出的任何相邻2束以上光线超过3 0 ms时,接收器立即输出报警信号。当有小动物或小物体挡住其中一束光线时,报警器不会输出报警信号[4]。但是遮挡时间和遮挡面积超过一定时限,接收器输出报警信号并且启动摄像头对闯入行人进行抓拍。红外栅栏在栏杆处于关闭状态,红灯亮的时候开启,自动检测有无物体经过,若有,则会发送信号至声光报警系统和司机驾驶车厢以提示司机,并且启动摄像头进行抓拍。当栏杆处于开启状态时,绿灯亮,红外栅栏关闭,行人可以通过路口。当停电或出现故障时会自动抬起,不会影响行人通行。
4 系统软件设计
4.1 环境搭建
RealView MDK 开发套件作为系统软件设计使用平台,来源于德国的Keil公司,已广泛应用于嵌入式开发,是针对各种嵌入式微处理器的软件开发工具。RealView MDK能够满足众多工程师的使用要求,其含有行业内顶尖的技术操作,也包含了uVision3 开发环境和RealView编译器。不仅可以在其中对多种嵌入式微处理器进行操作,还能够自动配置处理器的启动代码,大大提高了开发人员的开发效率,在开发启动代码时,操作者不再需要使用汇编语言去开发。
微处理器的开发软件采用的是MDK-ARM,因为这款软件操作简单,对嵌入式初学者使用比较方便,可以满足不同情况的嵌入式系统的设计要求。MDK-ARM的特点如下[5]:
(1)可以对各种内核微处理器进行操作;
(2)具有源码的实时小型封装操作系统;
(3)集成了不同的开发环境;
(4)通过调试器和仿真器,可以烧写代码和模拟仿真;
(5)具有多种项目例程以助于了解MDK-ARM内部属性;
(6)使用图形用户界面为系统开发提供GUI库支持。
4.2 主控程序设计
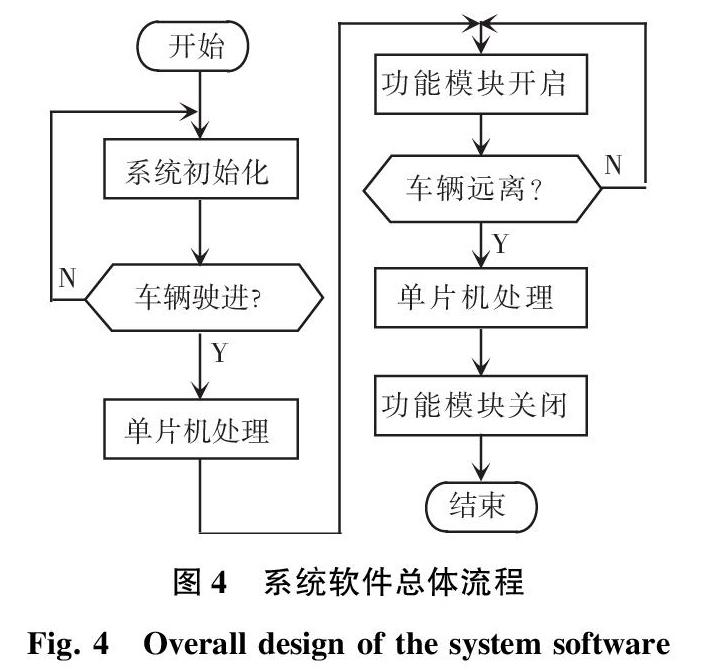
主控程序设计主要是构建整个软件系统框架和完成相关模块的初始化。系统利用STM32单片机组成的主控系统,通过感知层检测列车运行情况,判断列车是否驶近路口,经单片机处理对模块功能进行控制。系统软件构成如图4所示。
4.3 信号与机模转换程序设计
此模块不仅仅考虑到车来往时栏杆对应的起降,还对列车沿线垂直路口的交通信号灯的配时方案做出了设计。由于电车经过路口时,电车是有优先通过权的,所以需对十字路口的交通灯作出相应的调整。
电车即将到达路口时:报警装置立即启动,垂直于电车方向的交叉口的交通灯为红色,3 s后栏杆下降。电车方向的交通灯保持原来的时序不变,直到电车驶离路口。这样就不会使人或车辆滞留在路口中间,保证了电车的正常运行。
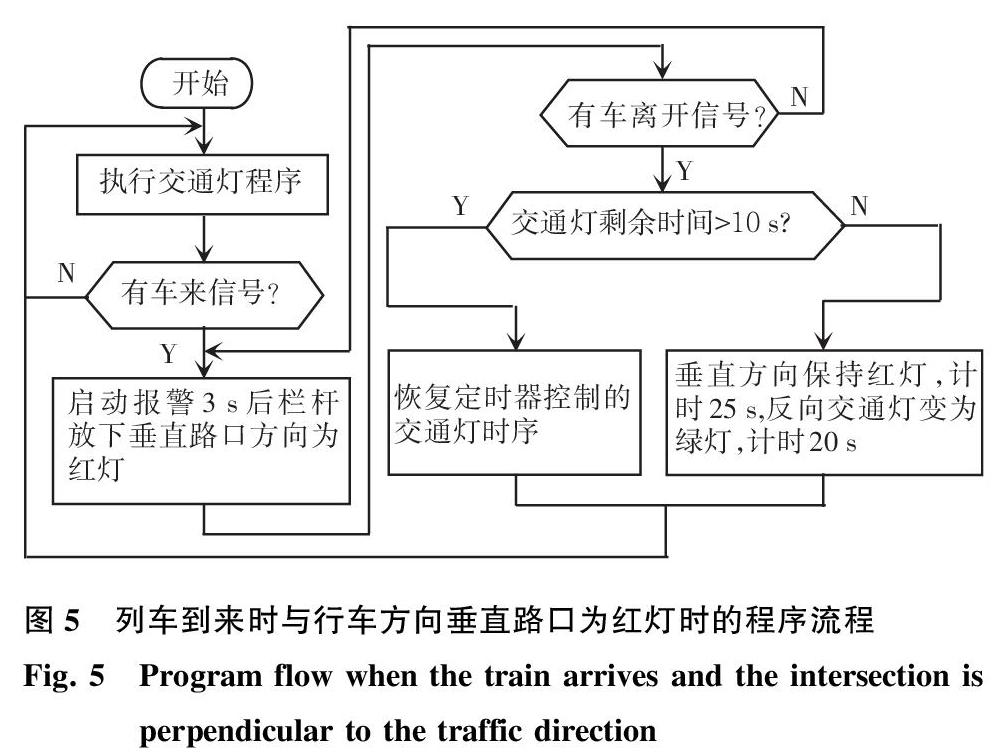
电车驶离路口时:警报装置关闭。需事先设定好定时器,如果与电车垂直的路口方向是绿灯,而且剩余的时间大于10 s,当检测到电车离开交叉路口时,与电车行驶方向垂直的路口交通灯变换成绿色,此时绿灯亮起的时间是按正常情况下计算剩余时间,然后绿灯闪烁3 s,黄燈闪烁2 s,交通灯变换为红色。而在电车行驶方向的交通灯从车到达路口一直到离开路口的这段时间,一直保持正常的时序不变。当电车驶离路口时,按照定时器的设置,如果此时与电车行驶方向垂直的路口方向是绿灯,而且剩下的时间是小于10 s的,这时不足以让此方向上的行人和车辆通过,此方向红绿灯直接变为红色,时间为25 s,相应的电车行驶方向的交通灯变为绿灯,时间为20 s,此后恢复路口交通灯的正常执行的时间顺序。
根据上述控制要求,电车接近路口并离开路口时的交通灯控制流程。如图5所示。
4.4 行车数据采集
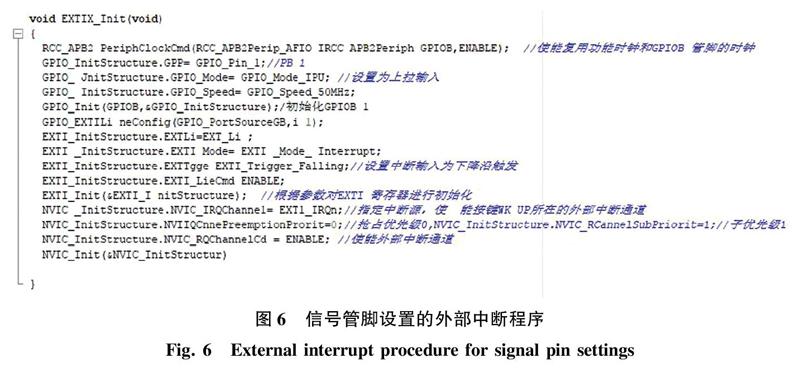
由于STM32 具有中断和定时器功能,通过接收线圈频率来判断列车行驶的实时情况。首先,将微处理器输入方式的自身频率信号引脚设置为外部中断,并将中断触发方式设置为下降沿触发,每次在频率脉冲的下降沿进行次数统计。系统在定时器设定的时间周期内计算频率脉冲下降沿次数,经过计算可以得到线圈的频率数值,列车通过线圈的时间会比定时器设定的时间周期大很多,因为这样可以减小判断列车经过线圈时频率值的误差,频率值的变化趋势也可以在此时获得。图6是对信号管脚设置的外部中断程序。
4.5 模拟测试
实验在Labview上进行了模拟测试,并且完成了车辆检测、车来杆落、车走杆升、声光报警、车来期间行人闯红灯监测、抓拍的功能。并且检测到了车速、车距离路口的具体车距,数值在实验中均有显示。此次模拟测试证明了本系统装置的可行性。图7是Labview模拟实验测试截图。
5 结束语
目前,国内轨道交通行业正处于迅速发展的阶段。在中国大小城市中,因成本建设要求难度无法建造地铁,而建设有轨电车的城市越来越多。在地面运行的有轨电车,必将穿过街道、人行道。由于小型交叉路口很少安装安全防护措施装置,本文就应用于此种安全防护措施的装置进行了系统的设计,深入分析了列车检测原理并完成了基于STM32F103ZET6的软硬件架构。可实现全程自动控制,能够完成列车检测、自动抓拍、栏杆起降、紧急制动、数据传输等功能,本系统装置的应用可以节约运营成本,避免人力物力浪费,实现交通的智能化。
参考文献
[1]张国华. 基于自动栏杆机扭矩电机控制系统的开发[D]. 石家庄:河北科技大学,2009.
[2]肖前红. 基于环形线圈的车辆检测器设计[J]. 科技广场, 2010(7):153-155.
[3]李云鹏. 发动机燃油喷射电子控制单元硬件设计[D]. 成都:电子科技大学,2005.
[4]fujinwen168. 红外栅栏报警器的工作原理与应用[EB/OL]. [2012-12-24] https://wenku.baidu.com/view/67e2bf7131b765ce050814fe.html.
[5]周彬. 基于STM32的嵌入式线圈车辆检测系统研究与设计[D]. 南京:南京信息工程大学,2016.
[6]刘昊,朱振华,于建辉. 城市无人值守铁路道口自动控制系统[J]. 长春理工大学学报(自然科学版),2011,36(4):83-86.
猜你喜欢
环球时报(2018-10-15)2018-10-15
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
WTO经济导刊(2017年3期)2017-03-17
小雪花·成长指南(2015年10期)2015-10-23
小天使·五年级语数英综合(2015年6期)2015-07-08
中小学实验与装备(2014年2期)2014-09-21
读写算·小学低年级(2014年6期)2014-07-24
纺织导报(2009年8期)2009-12-15
学苑创造·A版(2009年9期)2009-11-12
