一种适用于捷联探测器的空间目标搜索算法
2019-09-13 08:40宿敬亚王俊波
导航定位与授时 2019年5期
田 源, 宿敬亚, 王俊波
(1. 北京航天长征飞行器研究所,北京 100076; 2.北京电子工程总体研究所,北京 100854)
0 引言
在大气层外空间中由运载器释放的小型飞行器,由于自身轻小灵活的特点,可以执行一些特别的空间飞行任务,常见的有空间目标识别、空间目标测量以及对地目标探测等,其在执行任务期间往往需要对目标进行捕获和跟踪。由于空间飞行器体积和质量的限制,探测器往往轻质小型,捷联安装于弹体,且探测中心光轴与弹体纵轴重合,所以捕获目标就是要求目标与飞行器质心的连线与弹体纵轴间的夹角小于探测器的视场角。在对目标进行搜索前,探测器可能具备目标相对自身的空间方位先验信息,也可能由于某些原因不具备该先验信息,这给目标搜索算法的设计带来一定的困难。进一步,如果目标相对探测器的方位未知,则搜索的范围将不仅限于探测方向的前半球,而是以探测器为原心的整个球型范围。国外对这个问题的研究已进入了工程实验阶段,但难以见到对具体搜索算法的描述。国内的研究目前多针对大气层内导弹的导引头开展,如旋转弹导引头[1]和常规导弹导引头[2]、制导雷达[3]、图像制导导引头[4]、光学-被动复合导引头[5]、毫米波导引头[6-7]、无人机机载电视导引头[8]和地面雷达[9]等,由于应用场景通常是地面目标或空中目标,难以直接用于空间全方位探测的情况。针对单无人机和多无人机采用航路规划的方式,通过设计搜索路径实现目标搜索[10-11],并不适用于在轨飞行的空间飞行器。对于空间飞行器的搜索问题,文献[12]针对大气层外拦截弹的目标搜索问题,提出了一种等角速度搜索算法,但没有分析弹目相对运动对搜索的影响,也没有给出姿态控制指令的生成方式。文献[13]分析了搜索过程中姿态控制系统的工作特点,提出了一种等线速度搜索算法,但由于该方法扫描的周期为变化值,不利于根据弹目相对运动速度设计扫描的重叠区域大小。
本文首先建立了空间目标搜索问题的数学模型,然后分析了目标与探测器相对运动以及探测器视场范围对搜索过程的影响,设计了一种能够确保成功捕获目标的搜索算法,重点分析了该算法生成的螺旋搜索轨迹与目标-探测器相对角速度和飞行器姿态控制精度间的关系,给出了搜索轨迹重叠区域与目标-探测器相对角速度和飞行器姿态控制精度间的约束条件,同时给出了应用搜索轨迹生成姿态控制系统需要的控制误差信号的方法,最后通过仿真分析了该算法的有效性。
1 目标搜索问题的数学描述
为了方便对目标搜索问题的描述,定义弹体坐标系O-XbYbZb,参考坐标系O-XnYnZn和视线坐标系O-XsYsZs如下:弹体坐标系的原点位于质心,OXb沿弹体纵轴指向前方(也与探测器中心轴重合),OYb在弹体对称面内指向上方,OZb与OXb、OYb构成右手系;参考坐标系固联于弹体,与目标搜索开始时刻的弹体坐标系重合,该坐标系中各坐标轴的指向相对惯性空间不变;视线坐标系的原点位于质心,OXs沿目标与探测器的连线指向目标,OYs在竖直面内指向上方,OZs与OXs、OYs构成右手系。
如图1所示,在参考坐标系中,以原点O为中心,某一定值ρ(如,1m或100m)为半径作球面;探测器的视场为一个圆锥,该圆锥与球面相交于圆弧AB,该圆锥的中心轴与球面相交于点C;目标与探测器质心的连线(即视线)与球面的交点为D,称这个视线交球面的模型为探测器球面模型。目标相对探测器的方位可以用视线坐标系相对参考坐标系的2个视线角来描述,即视线高低角qV和视线方向角qH。利用探测器球面模型,可以将视线角的变化转换为点D在探测器球面上相对参考坐标系的位置变化。取球面半径ρ=1,则视线交点D在参考坐标系中位置坐标的转换关系如下
(1)
其中,xn、yn、zn为交点D在参考坐标系O-XnYnZn中的位置坐标分量。
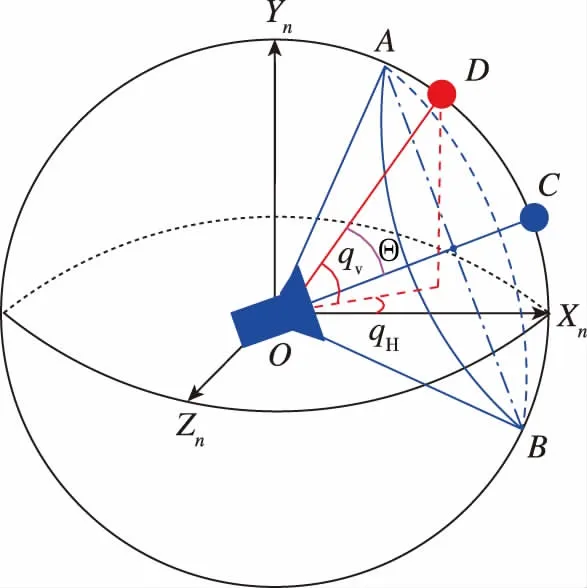
图1 目标与探测器的相对几何关系Fig.1 Relative geometry between target and seeker
目标与探测器的连线OD与探测器中心轴OC间的夹角Θ可以表示如下
(2)
其中,xb、yb、zb为交点D在弹体坐标系中的位置分量,可以利用弹体姿态由xn、yn、zn计算得到。
设探测器视场的半椎角为Φ,搜索过程允许的最长时间为T。搜索问题可以描述为确定交点D在探测器球面上的变化规律,使得无论目标位于探测的任何方位,都可以在时间T内通过探测器视场对探测器球面的扫描来满足目标捕获条件Θ<Φ。
2 搜索方法设计与分析
2.1 算法设计
当目标方位的先验信息已知时,为了尽快捕获目标,搜索轨迹的起点应该是探测球面上交点D出现概率最大的位置,即在开始搜索前让探测器中心轴指向目标出现概率最大的方位,然后逐渐让探测器视场形成的圆锥向目标出现概率减小的方位扫描,直到捕获目标。当目标方位的先验信息未知时,搜索的起点从任意方位开始,探测器视场形成的圆锥对探测球面进行盲扫,为了能够确保捕获目标,盲扫的区域必须覆盖整个探测球面,这是确保成功捕获目标的条件之一。另一方面,目标与探测器间的相对运动也会给搜索造成影响。如图2所示,时刻1的目标位置用T1表示,探测区域用C1表示,时刻2的目标位置用T2表示,探测区域用C2表示。左图描述了捕获失败的情况,时刻1目标(T1)在探测区域C2(在C1外),当时刻2探测器扫描到区域C2时,目标(T2)已经运动到C1(位于C2外),探测器捕获失败。右图描述了捕获成功的情况,即前后2个时刻目标没有运动出探测区域(C1和C2)的重叠部分。为了满足上述2个条件,搜索算法设计如下。

图2 相对运动对搜索效果的影响Fig.2 Influence of the relative motion on target searching
为了方便地描述搜索轨迹,如图3所示,将探测器球面上交点D在参考系中的位置坐标用另一种极坐标形式描述如下
(3)
其中,ρ为极径,其大小不影响搜索轨迹的描述,取为1;λ∈[0,π],ε∈[0,2nπ],n=1,2,3,…。

图3 交点D的极坐标示意图(右图为圆弧AB所在截面)Fig.3 Polar coordinate of the crossing point D(the section of the arc AB is shown in the right picture)
这样,搜索任务转化为设计极角λ和ε的变化规律,使得无论目标位于探测的任何方位,都可以在搜索时间T内通过探测器视场对探测器球面的扫描实现Θ<Φ。当目标方位的先验信息已知时,探测器初始指向(交点C)对于目标真实方位(交点D)的偏差为多种因素作用下的二维随机变量,按照大数定律,该随机偏差量服从二维正态分布。由二维正态分布概率密度函数的中心对称性可知,概率最大的随机偏差取值为0,随着偏差值的增大其所代表的情况出现的概率减小,即概率最大的情况为交点C与交点D重合,随着交点C偏离交点D越大其出现的概率越小。因此,搜索轨迹应该是位于探测器球面上的一种以交点D为中心的螺旋渐开线,如图4所示,该渐开线可以由极角λ和ε描述如下
(4)
其中,Δ为目标搜索过程中探测器视场的余量,通过调节该项可以抵消相对运动的影响,后面会深入讨论。
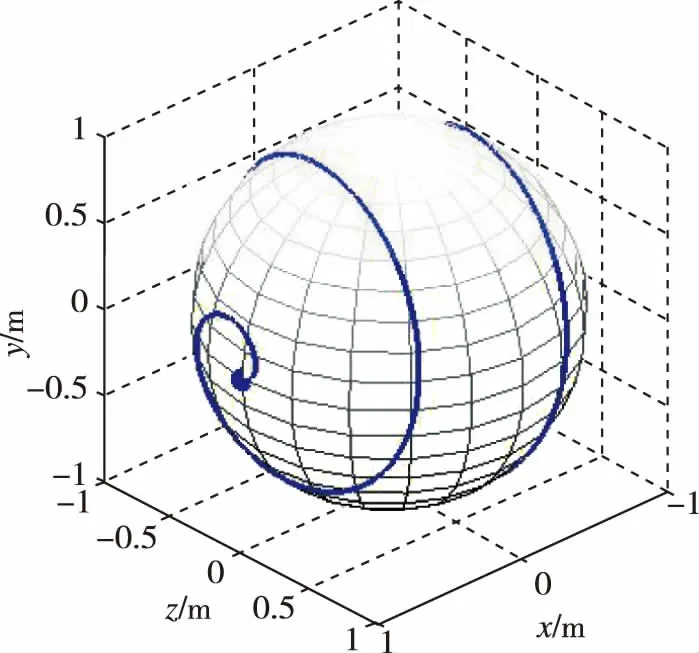
图4 探测球面上的搜索轨迹Fig.4 Trajectory on the surface of the searching sphere
2.2 算法分析
为了使搜索算法具有良好的性能,需要分析影响搜索过程的因素,包括姿态控制系统动态性能、目标相对探测器的运动速度,以及姿态跟踪精度。
首先,极角λ由0变化到π表示完成一次搜索,搜索时间越短,探测器扫描的角速度越大,由于探测器捷联安装,其扫描的角速度即飞行器的调姿速度。扫描的角速度取决于搜索时间T,而T的选择需要根据姿态控制系统的动态性能来确定。
对于视场半椎角为Φ的探测器而言,要使搜索过程不出现遗漏,必须保证螺旋渐开线搜索轨迹中相邻2圈对应同一极角ε的极角λ之差不大于2Φ。搜索算法中的2Φ-Δ即为上述极角λ之差,其中的探测器视场余量Δ越小,相邻2圈中扫描区域重叠的部分越大,扫描圈数越多,探测器在搜索时间T内的扫描速度越大,即扫描的效率越低。在外部干扰的作用下,实际的探测器指向与搜索轨迹之间存在偏差,扫描区域重叠的部分能够对该偏差形成补偿。
假设目标相对探测器的距离不变,定义探测器与目标的连线为视线,令视线角速度在垂直于搜索轨迹方向(即探测球面上搜索轨迹的法线方向)的分量为ω⊥,ω⊥描述了目标与探测器在垂直于搜索轨迹方向上的相对运动速度。根据式(4)可以计算出极角ε变化2π的时间为(2Φ-Δ)T/π,此间目标相对探测器的方位变化为δm=ω⊥(2Φ-Δ)T/π,要满足上述偏差补偿的条件δm<Δ,则有如下关系
(5)
其中,Δ1为相对运动引起的探测视场损失。另一方面,探测器视场余量Δ还受到姿态控制精度的影响,Δ2=δc。其中,Δ2为姿态控制引起的探测视场损失,δc为姿态控制精度。最终应该综合考虑相对运动与控制精度两方面因素选取合适的Δ=Δ1+Δ2来满足式(5)的约束条件,这样可以确保搜索过程中不会遗漏目标。
一般对于存在相对运动的探测器与目标来说,随着目标与探测器间相对距离的减小,视线角速度变化的剧烈程度会增加。根据式(5)可知,Δ会逐渐接近2Φ,由于受到姿态控制系统动态性能的限制,导致搜索算法的效率逐渐降低,最终失效。可见,目标搜索算法成立的前提条件是探测器距目标足够远,使二者相对运动速度的影响不大于探测器视场的余量Δ。
2.3 算法实现
目前发表的文献中,存在两类适用于探测轴指向调整的姿态控制方式:一种是文献[14]中提出的以空间旋转角距最小为约束条件的姿态控制方式,并给出了控制误差信号的生成方式,本文在此不进行讨论;另一种是文献[15]提出的单轴定向姿态控制方式,本文主要讨论如何应用搜索轨迹来生成这种控制方式需要的控制误差信号。
首先,利用控制系统导航解算出的弹体姿态信息将搜索轨迹(即探测器球面上交点D的运动轨迹)投影到弹体坐标系中,即
(6)
其中,xn、yn、zn为交点D在参考坐标系中的位置坐标,xb、yb、zb为交点D在弹体坐标系中的位置坐标。
然后,根据单轴定向姿态控制方式滚转进行姿态稳定控制,偏航和俯仰进行姿态机动控制的原则,可以如式(7)所示按3-2-1(俯仰-偏航-滚转)转动顺序或如式(8)所示按2-3-1(偏航-俯仰-滚转)转动顺序生成偏航和俯仰通道的姿态角控制误差信号为
(7)
(8)
其中,φe为俯仰角控制误差信号,ψe为偏航角控制误差信号,sgn(·)为符号函数。
3 仿真分析
假设探测器视场的半锥角为30°,控制任务允许的最大搜索时间为40s,搭载探测器的飞行器姿态控制精度为2°。
仿真算例1:目标的方位信息粗略已知,目标与载体质心的连线与探测器中轴间的夹角Θ=63°;
仿真算例2:目标的方位信息完全未知,目标与载体质心的连线与探测器中轴间的夹角Θ=161°。
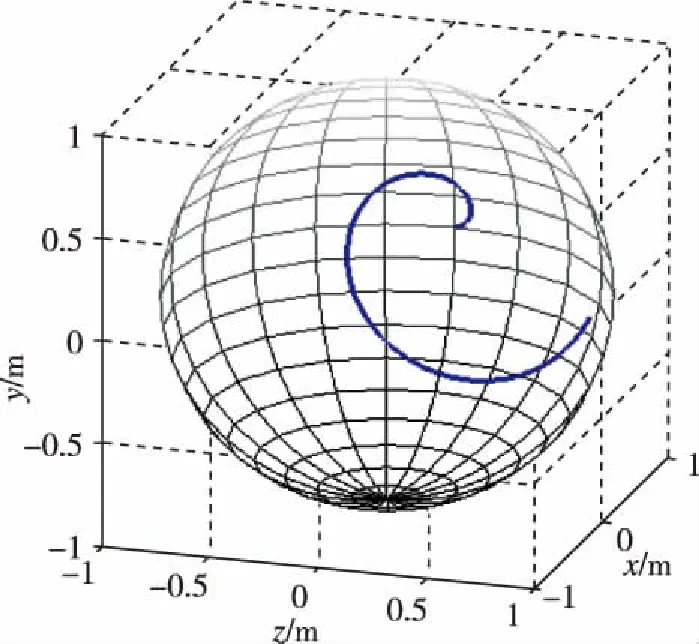
仿真结果如图5和图6所示。在仿真算例1中,目标的方位信息粗略已知,搜索前飞行器的指向与目标方位的偏差较小,在搜索算法的作用下探测器很快就成功地捕获了目标。从图5(a)可以看出,探测器仅扫描了一个较小的范围就发现了目标;从图5(b)可以看出,在第12s满足了目标捕获条件Θ≤30°。在仿真算例2中,目标的方位信息完全未知,搜索前飞行器的指向与目标方位的偏差较大,在搜索算法的作用下探测器经过了较长时间才捕获到目标。从图6(a)可以看出,探测器几乎扫描了整个球面的范围才发现目标;从图6(b)可以看出,在第35s才满足目标捕获条件Θ≤30°。
(a)探测球面上的搜索轨迹
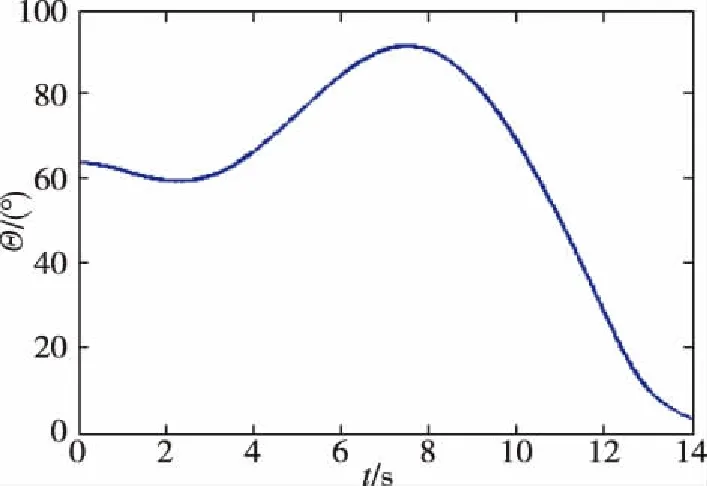
(b)Θ的变化曲线

(a)探测球面上的搜索轨迹

(b)Θ的变化曲线
4 结论
空间飞行器通过搜索捕获目标往往是实现飞行任务的先决条件,本文提出了一种适合于捷联探测器的目标搜索算法。该算法生成一条覆盖搜索球面的螺旋轨迹,螺旋轨迹的重叠区域受目标-探测器相对角速度和飞行器姿态控制精度的约束。已知目标方位的先验信息时,该算法都能够快速地发现目标;未知目标先验信息时,该算法通过搜索轨迹实现对空间各方位的扫描来确保发现目标。针对目标搜索算法的实现,文中基于单轴定向姿态控制给出了一种搜索轨迹与控制误差信号的转换方法。仿真结果表明,该方法有效可行,具有工程应用价值。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
舰船科学技术(2022年11期)2022-07-15
航天返回与遥感(2022年3期)2022-07-07
军民两用技术与产品(2021年2期)2021-04-13
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
科学与财富(2018年28期)2018-11-16
智能计算机与应用(2018年3期)2018-09-05
无线互联科技(2017年17期)2017-09-18
航空知识(2017年4期)2017-06-30
软件导刊(2017年1期)2017-03-06