自供电MR阻尼器复合减振系统对斜拉索振动控制试验研究
2019-10-19 01:41汪志昊许艳伟
振动与冲击 2019年10期
汪志昊,寇 琛,许艳伟,郜 辉
(华北水利水电大学 河南省生态建材工程国际联合实验室,郑州 450045)
被动黏滞阻尼器作为一种最常用的斜拉索机械阻尼减振措施,相关优化设计理论与效果评估得到了广泛研究[1]。研究结果表明:被动黏滞阻尼器已在一定程度上解决了斜拉索的振动问题,但其附加阻尼受到安装高度的制约,且阻尼器不可避免的支撑刚度[2]、索梁耦合振动[3]等因素均给斜拉索减振效率带来了不利影响;阻尼器的最优参数随斜拉索的模态阶次变化,不能同时实现多阶模态的最优控制。为此,有学者提出在斜拉索的两端同时安装被动黏滞阻尼器[4]、联合阻尼器与辅助索的复合减振[5-6],以及主动控制技术[7]提升斜拉索减振效果。
近年来,结构振动智能(半主动)控制技术逐渐成为提升结构减振(震)效果的重要手段,其中MR阻尼器以其优良的智能控制特性得到了普遍关注。在MR阻尼器斜拉索智能被动控制方面:Chen等[8]将MR阻尼器应用到洞庭湖大桥斜拉索减振;周海俊等[9]测试了MR阻尼器对实索的减振效果。在MR阻尼器斜拉索半主动控制方面:李惠等[10]将MR阻尼器应用到滨州黄河大桥;Weber等[11]将MR阻尼器应用到苏通长江大桥与俄罗斯岛大桥;王修勇等[12]、Duan等[13]、周强等[14]与Weber等[15]分别提出了神经网络、状态微分反馈、平衡逻辑与负刚度半主动控制算法。上述研究结果均表明:MR阻尼器对拉索减振效果显著。
为解决电磁调节式MR阻尼器的可靠电源供给问题,国内外学者基于振动能量回收技术提出了自供电MR阻尼器概念,并研制了多种样机。Kim等[16]、Sapiński等[17]与蒋学争等[18]分别基于直线电机电磁式振动能量回收原理集成了自供电MR阻尼器;汪志昊等[19]则采用旋转式能量电机与链条链轮传动机构集成了自供电MR阻尼器被动控制系统;关新春等[20]则采用压电能量回收技术构建了自适应MR阻尼器控制系统。相关研究表明[21-22]:能量回收电机不仅可用于结构振动能量回收,其本身也是电磁阻尼器,还可用于结构消能减振。
本文融合旋转式能量回收电机与MR阻尼器组建了斜拉索自供电MR阻尼器复合减振系统,除MR阻尼器直接参与耗能外,提供电源供给的能量回收电机作为电磁阻尼器也参与耗能。通过开展能量回收电机与MR阻尼器相对位置变化对拉索复合减振效果影响的试验研究,初步证实了该复合减振系统的可行性与有效性,有望为斜拉索减振提供新的思路与方法参考。
1 斜拉索-自供电MR阻尼器复合减振系统
构建的自供电MR阻尼器复合减振系统(见图1)由电磁调节式MR阻尼器、能量回收电机(永磁旋转式发电机)以及直线-旋转运动转化机构(滚珠丝杠)等组成。
如图1所示,当斜拉索受外部激励作用发生面内振动时,滚珠丝杠将斜拉索的往复直线运动转化为旋转式发电机转子的正反向转动,发电机回收的振动能量可为MR阻尼器的励磁线圈供电,形成自供电MR阻尼器复合减振系统。需要说明的是,该复合减振系统的两种耗能元件-MR阻尼器与能量回收电机既可以安装在斜拉索的相同位置(记为:紧凑型自供电MR阻尼器复合减振系统),也可以安装在斜拉索的不同位置(记为:分离型自供电MR阻尼器复合减振系统)。
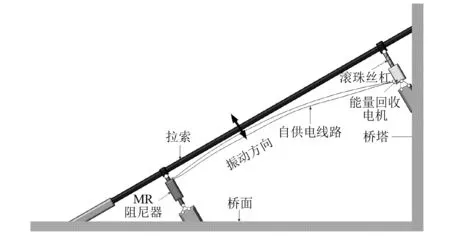
图1 斜拉索-自供电MR阻尼器复合减振系统示意Fig.1 Layout of a self-powered MR damper hybrid vibration mitigation system for a stay cable
2 模型斜拉索减振试验设计
2.1 试验平台
模型斜拉索-自供电MR阻尼器复合减振系统试验平台示意图,如图2所示,试验照片见图3。模型斜拉索采用7φ5钢绞线模拟,沿斜拉索间隔14 cm均匀安装配重钢块以调整斜拉索的固有频率,斜拉索详细参数见表1。MR阻尼器采用美国LORD公司RD1005-3型,主要性能参数有:最大出力约3 kN、行程±2.5 cm、最大瞬时输入电压12 V、励磁线圈常温内阻5 Ω。斜拉索振动能量回收系统的能量回收电机采用某永磁式直流测速发电机,主要性能参数有:电动势常数0.06 V/(r·min-1)、静态电枢内阻6.4 Ω、重3.7 kg、最大设计转速3 000 r/min;采用滚珠丝杠(导程16 mm)传动实现能量回收电机的转速增效,形成斜拉索振动能量高效回收系统,回收获得的电能直接作为MR阻尼器的电源供给。
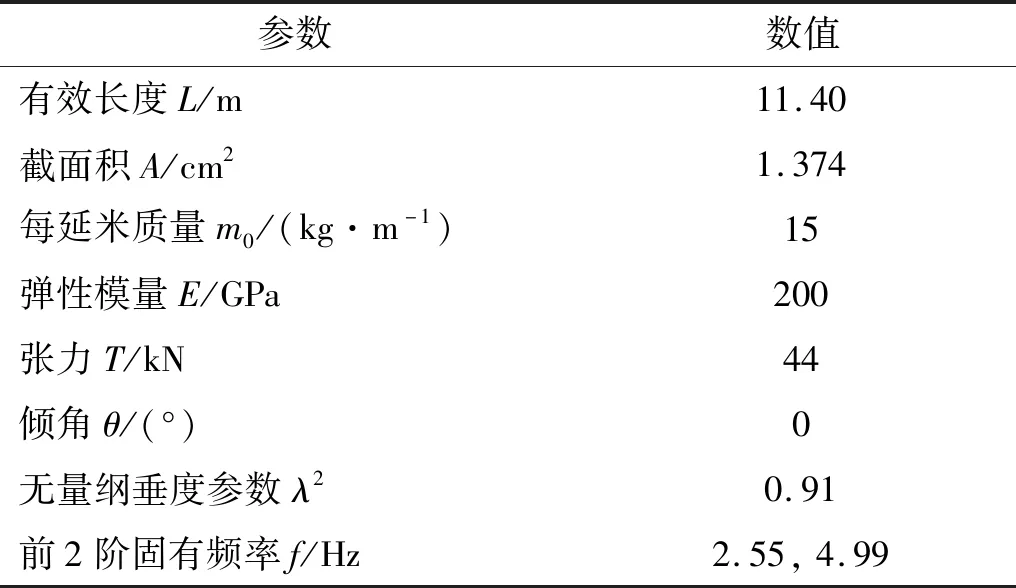
表1 模型斜拉索参数Tab.1 Parameters of the model cable
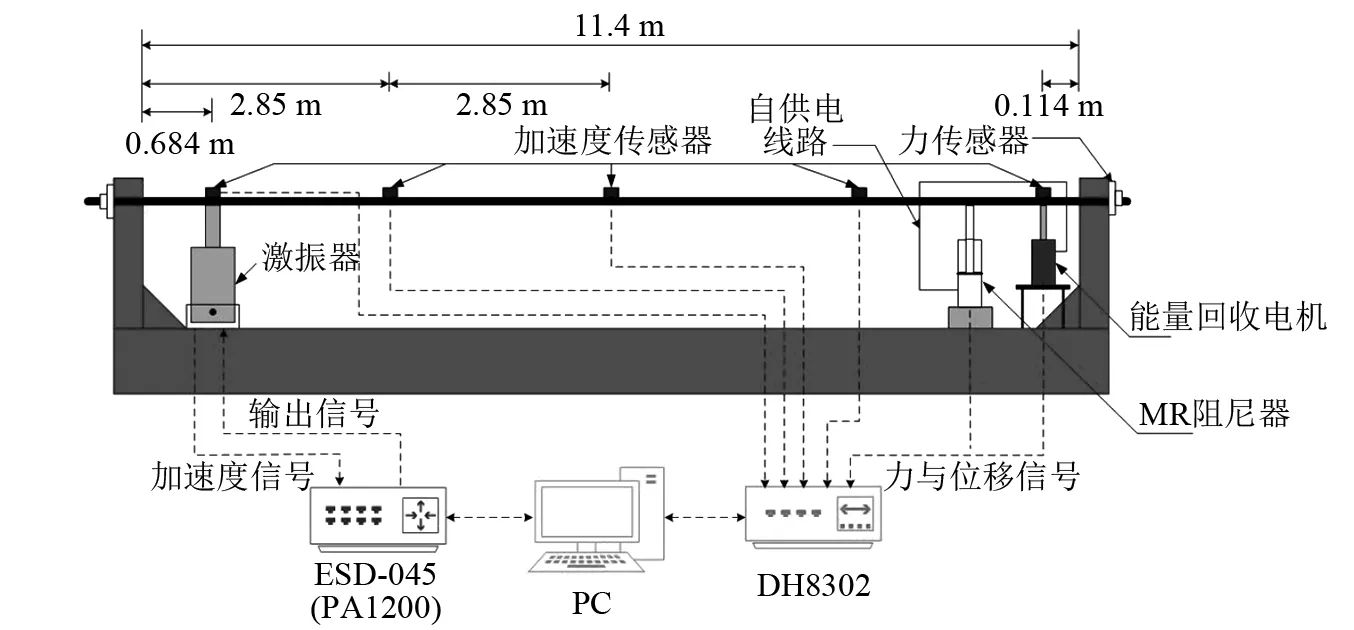
图2 斜拉索-自供电MR阻尼器复合减振试验平台示意Fig.2 Layout of experimental setup for cable vibration control with a self-powered MR damper hybrid system
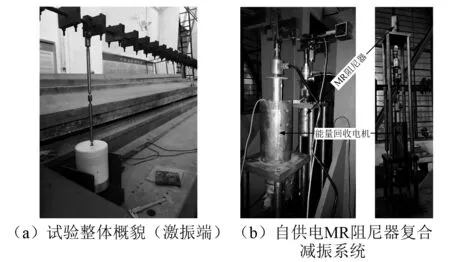
图3 斜拉索减振试验照片Fig.3 Experimental setup photos for cable vibration control
2.2 试验工况
图3(b)显示了自供电MR阻尼器复合减振系统的两种典型工作模式,分别表示MR阻尼器与能量回收电机二者安装在斜拉索相同端但并非同一位置,以及完全相同位置。依据MR阻尼器与能量回收电机相对位置的不同,斜拉索减振试验工况分为二者在斜拉索相同端和不同端两大类,其中相同端又可分为同一位置和不同位置两种情况。斜拉索自供电MR阻尼器复合减振试验工况,如表2与表3所示,其中“安装位置比”表示MR阻尼器或能量回收电机安装位置与斜拉索长度L的比值。
此外,为便于自供电MR阻尼器复合减振效果评价以及减振机理分析,还开展了斜拉索无控、MR阻尼器外供电被动控制以及能量回收电机电磁阻尼控制等试验工况。
2.3 试验方法
斜拉索第1阶模态采用四分点处人工激振(振动频率较低,电磁激振器激振效果不理想),第2阶模态则采用安装在阻尼器另一侧距离拉索锚固端0.684 m(6%l)的电磁激振器激振。每次试验均先激发斜拉索产生某一目标模态为主的大幅振动,然后瞬间去除激励,使斜拉索做相应模态的自由衰减振动。为便于对比分析所有试验工况斜拉索的减振效果,每阶模态阻尼比识别均分别选取斜拉索相同加速度衰减区间的峰值点数据进行拟合分析,其中第1、第2阶模态分别选取跨中位置测点4~8 m/s2与四分点位置测点8~12 m/s2区间加速度信息。
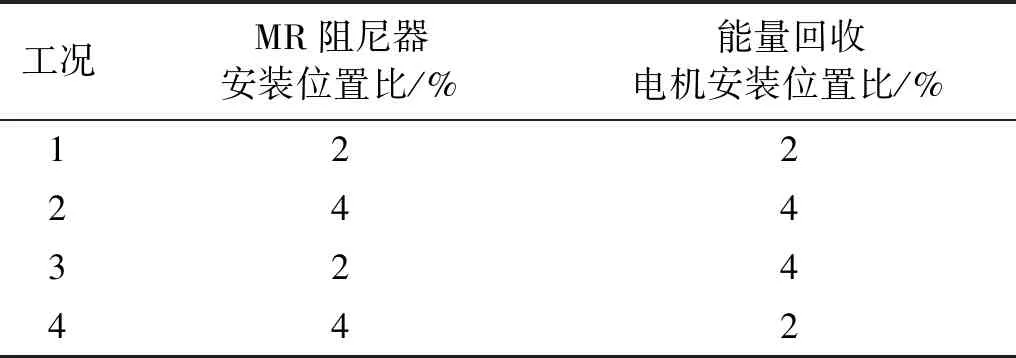
表2 斜拉索减振试验工况(MR阻尼器与能量回收电机安装在斜拉索相同端)Tab.2 Test cases of cable vibration control (the MR damper and the motor are attached at the same side of the cable)
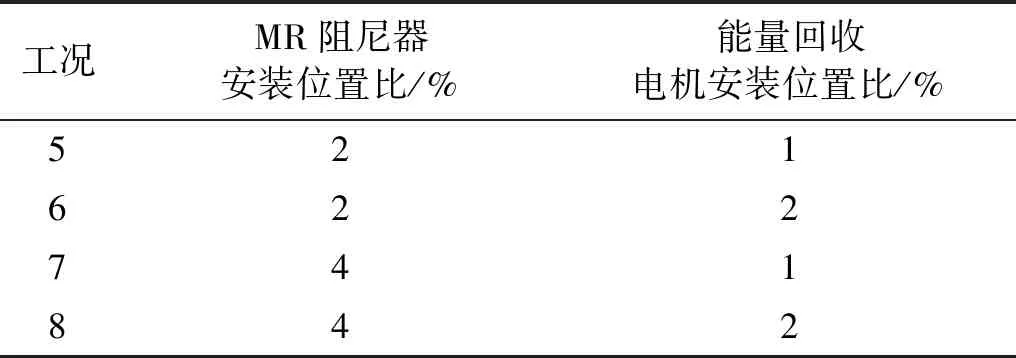
表3 斜拉索减振试验工况(MR阻尼器与能量回收电机安装在斜拉索不同端)Tab.3 Test ceses of cable vibration control (the MR damper and the motor are attached at the different side of the cable)
3 斜拉索减振试验结果
首先通过自由振动法测试得到了斜拉索(无控)的前2阶面内振动模态动力特性,试验识别得到的斜拉索前2阶模态固有频率分别为2.55 Hz与4.99 Hz,相应的模态阻尼比分别为0.16%与0.15%。
3.1 外供电MR阻尼器被动控制
图4给出了外供电MR阻尼器安装位置比4%,斜拉索相应前2阶附加模态阻尼比随阻尼器被动控制输入电压的变化关系。可见:斜拉索前2阶模态都存在MR阻尼器的最优输入电压,且均为0.40 V(记为“外供电MR阻尼器最优被动控制”),此时对应的斜拉索前2阶附加模态阻尼比分别为0.99%与1.28%。从外供电MR阻尼器最优被动控制效果来看,斜拉索前2阶模态阻尼比与理论最优值均存在一定差距,这主要是由于本文试验采用的RD1005-3型MR阻尼器对模型斜拉索来说存在阻尼力偏大的问题。
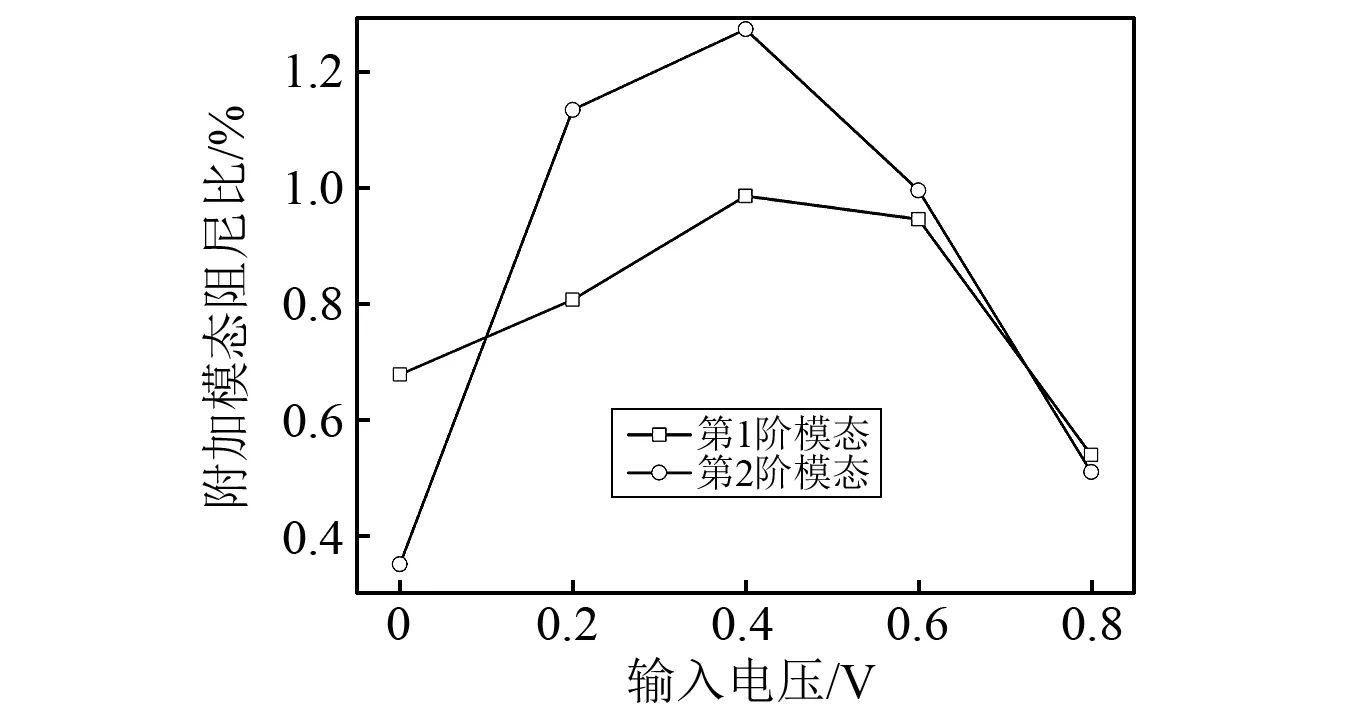
图4 外供电MR阻尼器被动控制斜拉索前2阶附加模态阻尼比与外界输入电压的关系Fig.4 Additional modal damping ratios of the cable in the first two modes versus external voltage of the passively operated MR damper
3.2 能量回收电机电磁阻尼控制
为明确自供电MR阻尼器复合减振系统中能量回收电机对斜拉索减振效果的贡献,特设置了MR阻尼器仅作为能量回收电机的负载工况,此时MR阻尼器并没有安装到斜拉索,其仅作为能量回收电机的负载参与工作。该工况斜拉索附加阻尼主要由能量回收电机的电磁阻尼提供。试验识别得到电机分别位于2%与4%位置斜拉索前2阶附加模态阻尼比分别为(0.54%,0.45%)与(1.40%,0.70%)。
3.3 自供电MR阻尼器复合减振
图5~图7分别给出了自供电MR阻尼器复合减振斜拉索振动观测点处的自由振动加速度典型时程曲线,图8给出了自供电MR阻尼器复合减振系统的MR阻尼器及能量回收电机的阻尼力典型时程曲线。由图可知:斜拉索自由振动加速度曲线基本符合对数衰减规律,表明自供电MR阻尼器复合减振系统整体呈现出线性黏滞阻尼特性。
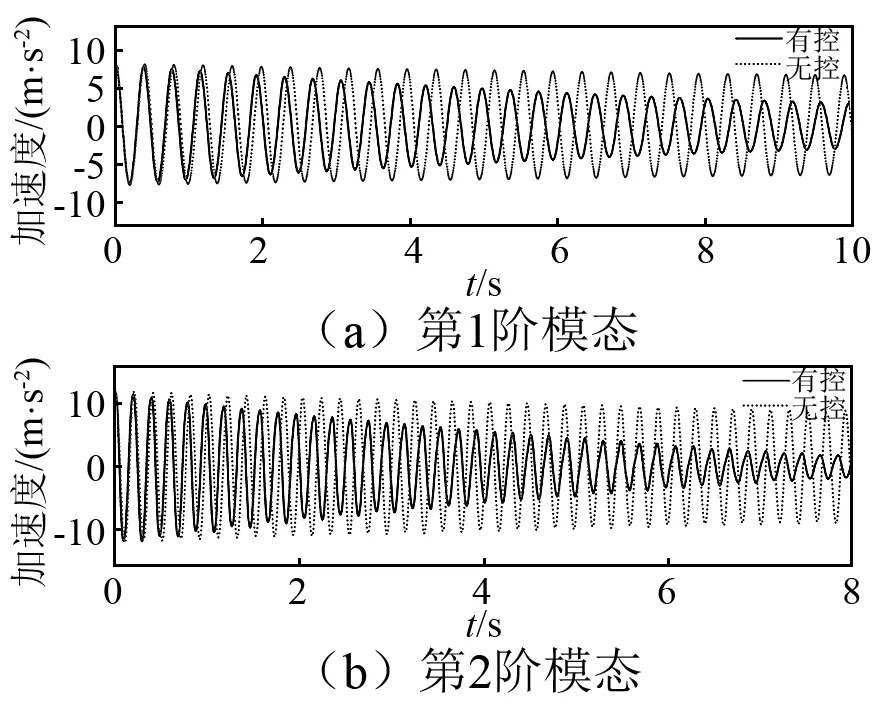
图5 斜拉索观测点的自由振动加速度时程(工况2)Fig.5 Free vibration acceleration time histories of the cable at observation point (case 2)

图6 斜拉索观测点的自由振动加速度时程(工况3)Fig.6 Free vibration acceleration time histories of the cable at observation point (case 3)
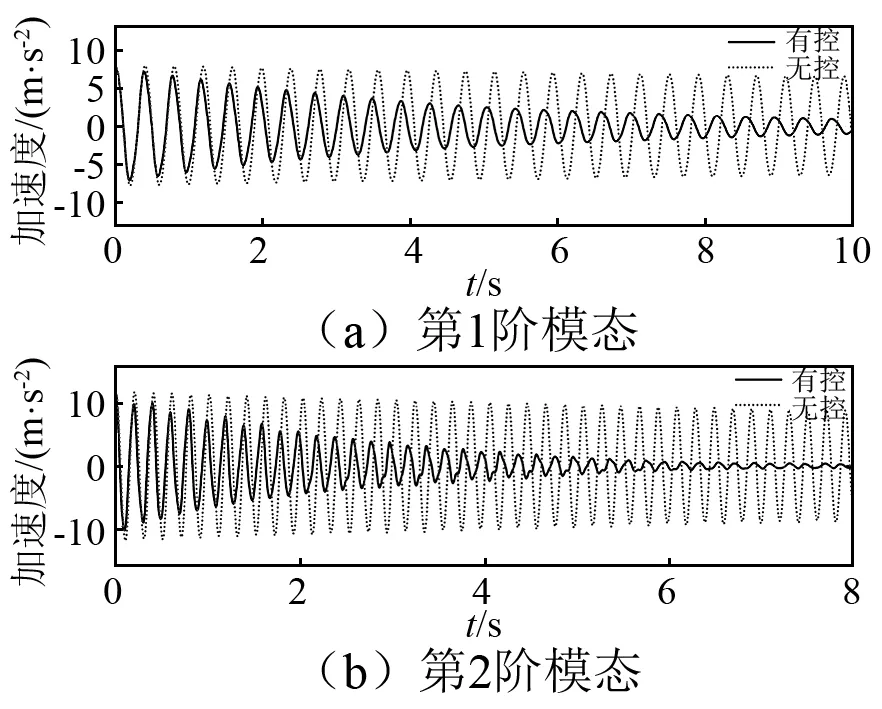
图7 斜拉索观测点的自由振动加速度时程(工况8)Fig.7 Free vibration acceleration time histories of the cable at observation point (case 8)

图8 MR阻尼器与电机的阻尼力时程曲线(工况8)Fig.8 Damping force time histories of the MR damper and the motor (case 8)
自供电MR阻尼器复合减振所有试验工况识别得到的斜拉索模态阻尼比与附加模态阻尼比结果,如表4所示。若以MR阻尼器安装位置比4%作为基准,对比外供电MR阻尼器最优被动控制、自供电MR阻尼器复合减振(工况2、工况4、工况7与工况8)效果可以看出:复合减振系统的MR阻尼器与能量回收电机安装在相同位置(工况2)时,复合减振效果最差,远小于MR阻尼器最优被动控制效果;当MR阻尼器与能量回收电机安装在同端不同位置(工况4)时,复合减振效果明显优于二者安装在相同位置时的减振效果,介于MR阻尼器最优被动控制和能量回收电机电磁阻尼控制效果之间;当MR阻尼器与能量回收电机安装在不同端(工况7、工况8)时,减振效果明显得到提升,尤其工况8复合减振效果已超越外供电MR阻尼器最优被动控制效果。
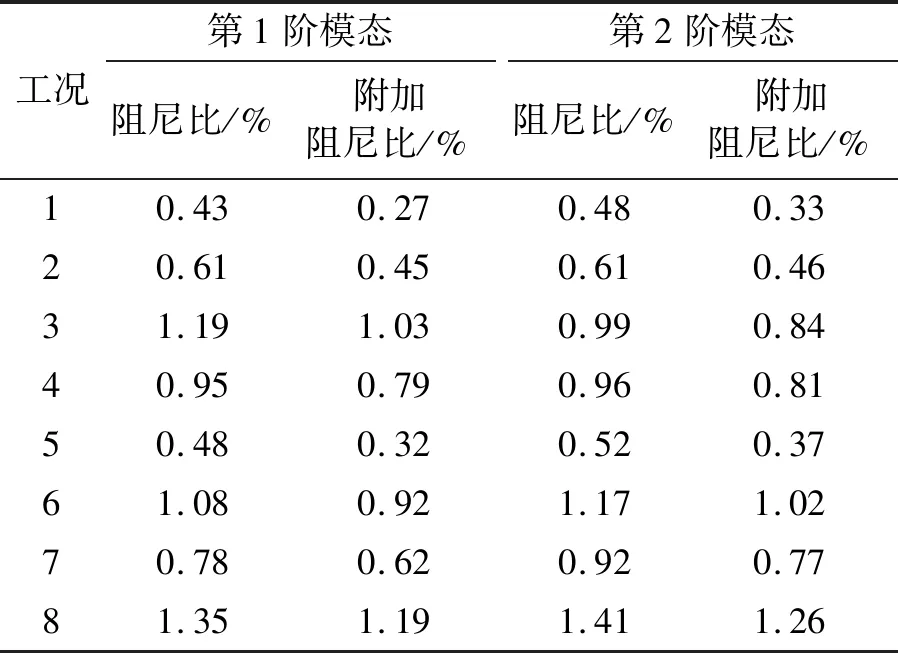
表4 自供电MR阻尼器复合减振对拉索振动控制试验结果Tab.4 Vibration control performance of the cable with the self-powered MR damper hybrid system
由上述减振试验结果可知,MR阻尼器与能量回收电机位置匹配合理的自供电MR阻尼器复合减振系统对斜拉索具有较好的减振效果。与Hoang等研究中的斜拉索-双黏滞阻尼器系统模型类似,本文自供电MR阻尼器复合减振系统的MR阻尼器与能量回收电机相当于在斜拉索安装了两个不同类型的阻尼器。当两个阻尼器安装在斜拉索相同端时,减振效果甚至弱于单个阻尼器;当两个阻尼器安装在斜拉索不同端时,减振效果有望提升。对于斜拉索-自供电MR阻尼器复合减振系统,当MR阻尼器与能量回收电机安装在斜拉索相同端时,两种阻尼器会相互干扰,斜拉索减振效果较差,尤其是MR阻尼器与能量回收电机安装在斜拉索同端完全相同位置时,减振效果最差;当MR阻尼器与能量回收电机分别安装在斜拉索不同端时,两种阻尼器产生耦合、协同增效作用,斜拉索减振效果得到明显提升。
4 结 论
本文提出了一种基于旋转式电磁能量回收技术的自供电MR阻尼器复合减振系统,通过滚珠丝杠传动系统实现了斜拉索往复直线运动与能量回收电机高速旋转运动的转化,振动能量回收效率可以有效满足MR阻尼器供电需要,使得MR阻尼器摆脱了对外界电源供给的依赖。该复合减振系统以MR阻尼器耗能为主,以提供MR阻尼器电源供给的能量回收电机耗能为辅,二者协同工作实现耗能增效。斜拉索减振试验结果表明:
(1)自供电MR阻尼器复合减振系统的MR阻尼器与能量回收电机安装在斜拉索相同端时,相应的MR阻尼与电磁阻尼产生耦合、干扰效应,斜拉索减振效果恶化。
(2)自供电MR阻尼器复合减振系统的MR阻尼器与能量回收电机分别安装在斜拉索不同端时,相应的MR阻尼与电磁阻尼产生耦合、协同增效作用,斜拉索减振效果将得到提升。
(3)MR阻尼器与能量回收电机位置与参数匹配合理的自供电MR阻尼器复合减振系统对斜拉索具有较好的减振效果。为进一步彰显自供电MR阻尼器复合减振效果,后续有必要进一步优化MR阻尼器与能量回收电机的相对位置与性能参数。
猜你喜欢
交通科技(2022年6期)2022-12-29
成都信息工程大学学报(2022年4期)2022-11-18
科学技术创新(2022年18期)2022-06-24
施工技术(中英文)(2022年9期)2022-06-21
昆明医科大学学报(2022年3期)2022-04-19
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
城市道桥与防洪(2022年1期)2022-02-25
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
振动工程学报(2016年2期)2016-07-20