
基于总体最小二乘的弹载GPS数据分析与软件实现
2019-10-22 06:38陈瞳
兵器装备工程学报 2019年9期
陈 瞳
( 太原工业学院 网络与信息中心, 太原 030008)
利用弹载卫星导航(GPS)测量数据进行弹道重构,是掌握制导弹药飞行状态的必要手段,对提高制导弹药的打击精度具有重要的意义。然而,在对弹载GPS测量数据进行处理时,由于处理过程复杂且航向角测量精度较低,导致弹载GPS测量数据处理效率及精度均比较低,弹道重构可靠性难以得到保证[1-3]。目前,常用的GPS测量数据处理方法主要是通过各种GPS商用软件对实测数据进行解析[4-5],如阿什泰克公司的Solution、国内南方测绘公司的GNSS数据处理软件以及拓普康公司的Pinnacle。然而,在实际应用中,由于不同弹载GPS接收机输出信息(通信协议)各不相同,采用传统GPS商用软件与定制接收机的通信兼容性不能得到保证,且传统商用GPS软件内置航向角计算方法仅适用于地面常规环境,无法满足弹载高动态环境下航向角的测试精度要求。
为此,本文在提出一种基于总体最小二乘理论航向角确定方法的基础上,利用Matlab GUI界面功能完成了对弹载GPS测试数据进行分析处理的上位机软件设计。该软件通过提供良好的人机交流界面,省去了Matlab命令的重复使用,解决了数据处理过程中处理效率低下的问题;通过内置新型航向角确定算法解决了弹载高动态环境下航向角的鲁棒性高精度计算问题;最终实现了一种直观便捷、简单易用且功能可扩展的高精度弹载GPS数据分析处理软件平台设计。
1 GPS数据分析
考虑GPS输出信息为ECEF坐标系下弹体的速度及位置信息。然而,该坐标系下的定位信息在实际应用中无法直接应用,需要转换为北-东-地地理坐标系下的速度位置测量分量,完成对弹体外弹道飞行参数的特性分析。因此,弹载GPS信息的数据处理主要包括以下几方面[6]:
1) GPS位置信息从ECEF坐标系到北-东-地地理坐标系的转换
ECEF坐标系与北-东-地地理坐标系的转化关系如下所示:

(1)

2) 执行如下迭代计算,直至收敛:
φ=atan((z+e2RNsinφ)/p)
2) GPS速度信息ECEF坐标系到北-东-地地理坐标系的转换


(2)
式(2)中,λ为当前位置的经度信息;此外,将第二次平面旋转定义如下:
(3)
式(3)中,φ为当前位置的纬度信息;因此,GPS速度信息从ECEF坐标系到北-东-地地理坐标系的转换可表示为:
(4)
式(4)中,ve和vn分别表示GPS速度信息在ECEF坐标系及北-东-地地理坐标系下的投影。

(5)
式(5)中,sφ=sin(φ),sλ=sin(λ)〗,cλ=cos(λ),cφ=cos(φ)。

图1 地心直角坐标系
3) 航向角确定
Z=A-1X
(6)

因此,为降低系数矩阵误差对最小二乘算法造成的影响,本文采用总体最小二乘法对状态向量X进行最优估计,保证了最小二乘算法的无偏性[7-8]。总体最小二乘算法的核心思想是通过最小化系数矩阵A-1和观测向量Z的误差矩阵EA和EZ来估计状态向量X,因此,线性化方程(6)可准确表示为[9-10]:
(A-1+EA)X=Z+EZ
(7)
进一步将式(7)改写为如下矩阵形式:
(8)
其中,Ιk为k×k阶单位矩阵;通过采用奇异值分解(SVD),将增广矩阵[A-1+EA|Z+EZ]进行降秩,对直线参数进行总体最小二乘求解,具体求解过程如下:
C=[A-1+EA|Z+EZ]=
(9)

(10)

(11)
即:
(12)
根据如下关系:
[EA|EZ]=[A-1|Z]+[EA|EZ]-[A-1|Z]=
[A-1+EA|Z+EZ]-[A-1|Z]
(13)
并将式(9)和式(10)分别代入式(13)可得:
(14)
因此,结合式(10)和式(14)我们可以得到:
[A-1+EA|Z+EZ]=[A-1|Z]+[EA|EZ]=
(15)
(16)
对比式(16)和式(8)可得:
(17)
在获得GPS速度测量信息最优估计结果在北-东-地地理坐标系分量的基础上,本文采用GPS单天线测速确定航向角的基本原理,得到弹体的实时航向角如下:
ψ=atan2(VE,VN)
(18)
其航向角测量精度为:
(19)
2 软件设计及实现
弹载GPS数据处理分析软件设计总体思路如下:首先通过串口控件接收、提取并存储GPS数据。其次,通过GUI界面调用GPS数据进行数据解算,同时将解算结果存入指定文件。最后通过GUI界面将载体的位置、速度以及航向角信息以图形的方式显示。软件设计总体思路如图2所示,完整的GUI界面设计如图3所示。
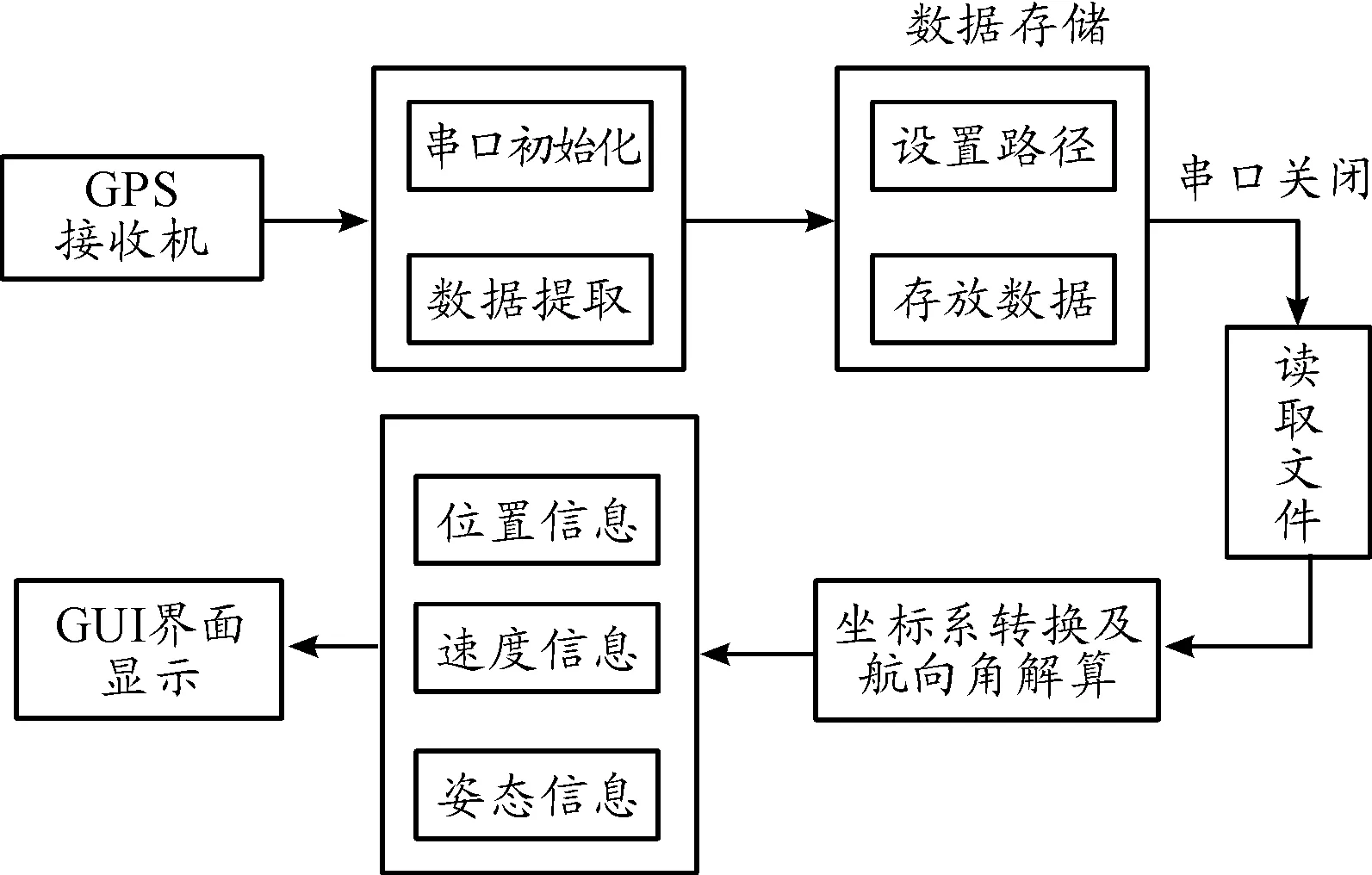
图2 软件设计总体思路框图

图3 完整的GUI界面
3 数值仿真与实验验证
3.1 弹载数值仿真
为验证本文所设计软件的实用性,本文通过弹道轨迹发生器生成弹道轨迹如图4所示,并将其编码导入所设计软件,通过在GUI界面上分别点击“三维信息”“位置信息”“速度信息”“航向角解算”按钮,得到如图5~图8所示导航结果。
从图5~图7可以得到,软件导出轨迹与弹道参数预设轨迹几乎一致,从而有效地验证了本文所设计软件的有效性和实用性。

图4 仿真弹道轨迹

图5 弹体运动三维位置信息
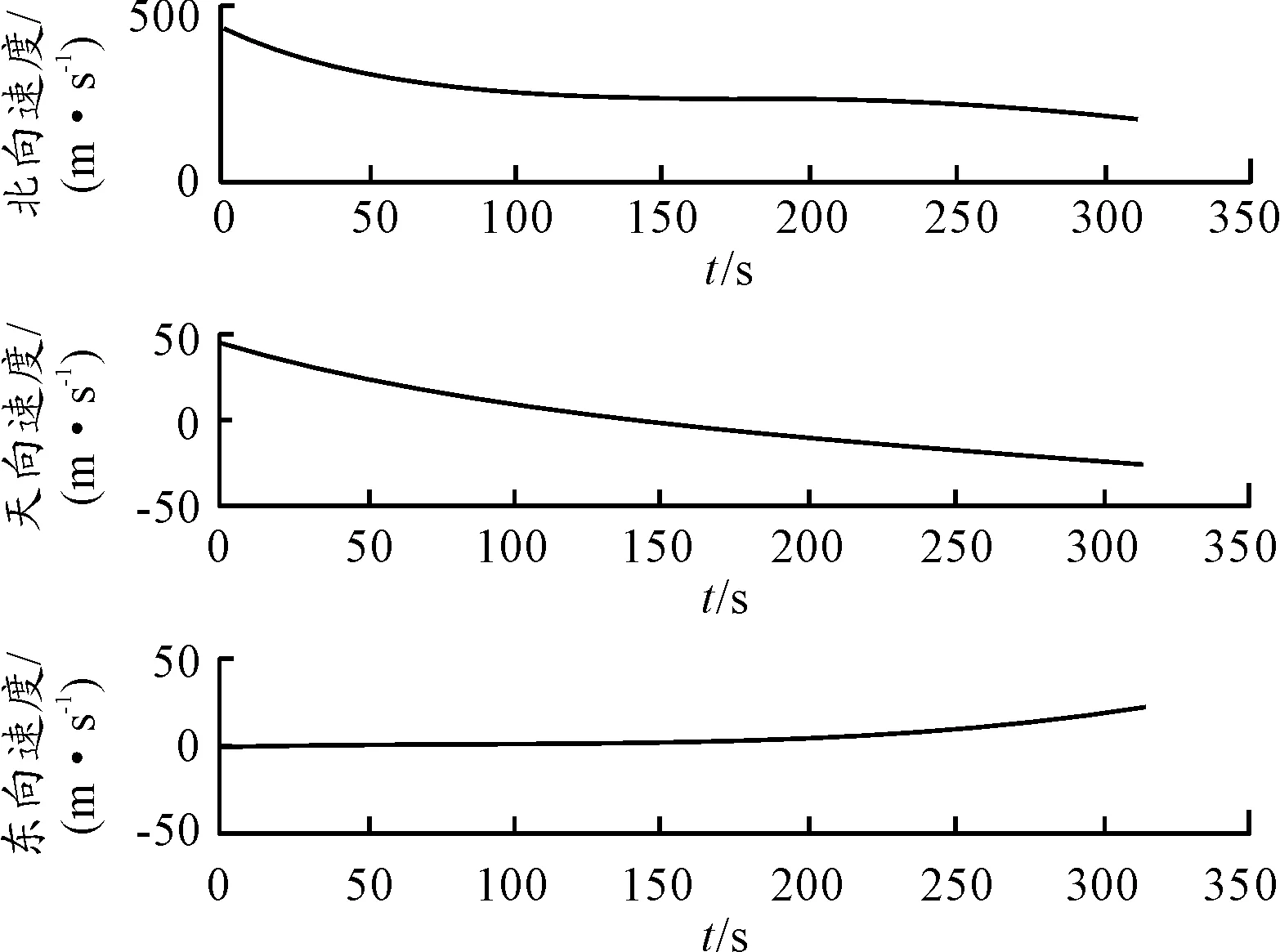
图6 弹体运动三维速度信息

图7 弹体运动航向角信息
3.2 地面车载试验验证
为进一步验证本文所提航向角确定方法的先进性,同时进行了地面跑车试验,跑车轨迹如图8所示。将原始采样信息导入数据分析软件并在GUI界面上分别点击 “位置信息”“速度信息”“航向角解算”按钮,可以得到如图9~图11所示的导航结果。

图8 二维运动轨迹

图9 三维位置信息

图10 三维速度信息

图11 航向角信息
从图9~图11可以看出,由本文所设计的基于Matlab GUI的GPS数据分析及处理软件解算得到的载体实时速度及位置测量信息与载体实际运动相符,从而有效地验证了本文所提GPS数据分析及处理软件在对GPS原始数据解码、存储及速度位置解算方面的有效性。同时,从图11可以看出,在0~40 s时间段内,由于载体运动速度较小导致传统的航向角确定方法精度较低、鲁棒性较差,而基于本文所提基于总体最小二乘理论的航向角确定方法能有效地避免传统航向角确定方法的不足,实现载体航向角的最优估计。
4 结论
介绍了一种基于总体最小二乘理论的航向角确定方法,利用Matlab GUI完成了GPS数据分析处理软件设计。结果表明,该设计直观便捷,实用性强,具有良好的实际应用价值。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
小哥白尼(趣味科学)(2022年3期)2022-06-09
科技与创新(2021年24期)2022-01-03
中学生数理化(高中版.高一使用)(2021年2期)2021-03-19
数字海洋与水下攻防(2020年5期)2021-01-04
弹箭与制导学报(2019年3期)2019-11-13
中国外汇(2019年6期)2019-07-13
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2019年7期)2019-04-25
