
基于YOLO算法的内河船舶检测与监控实现
2019-11-11 09:07凌梓钦徐昶悦仇威李志斌张馨月
航海 2019年5期
凌梓钦 徐昶悦 仇威 李志斌 张馨月


摘 要:随着内河水运的不断发展,内河航运船舶数量不断增多,但是内河船舶AIS设备安装质量参差不齐,这给监管部门掌握区域内航行船舶数量带来困难。同时,随着计算机计算能力的提高与人工智能技术的发展,基于卷积神经网络的图像识别系统有了越来越多的应用。本文提出了使用YOLO实时目标检测技术,实现了对内河中运行的船舶进行实时监控并记录。结果表明,该模型在测试集当中的识别准确率达到97.50%,在实际应用当中拥有识别速度快、实时性较好、准确度较高的优点,拥有较好的应用前景。
关键词:目标检测;内河船舶;卷积神经网络;YOLO算法
0 引 言
随着计算机技术的不断发展,基于卷积神经网络的图像识别技术的识别精度和速度在不断提高。传统的Fast-RCNN算法通过将图片网格化,在滑动窗口对图像当中的物体进行识别[1],这一算法虽然确保了精度,但是检测速度较慢,无法满足实时检测的需求。2016年,对图像进行一次性总体识别的You Only Look Once(下文称YOLO)实时目标检测技术横空出世,其标准版本在NVIDIA Titan X GPU当中可以达到45 FPS的检测速度与小于25 ms的检测延迟,为实时目标检测提供了實现基础。本文基于YOLOv1算法结合对内河船舶流量监控的实际运用,实现了对内河船舶的检测与识别。
1 研究背景及意义
1.1 研究背景
目前,船舶流量采集的手段主要有船舶交通管理系统(VTS)、船舶自动识别系统(AIS)、人工统计等。通过AIS系统采集流量是最广泛的船舶流量采集手段。
杨浦海事局于2017年3月起开展了一次国内航行船舶船载AIS专项检查,现场检查结果正常海船占比达87.76%, 内河船仅为79.21%;检查存在问题海船占比仅为12.24%, 内河船为20.79%[2]。目前,在内河航道运行的船舶中存在着一部分私自建造并投入运营的非标准船舶,而这些船舶是否按照有关规定配备AIS系统则无法判断。
在AIS设备使用当中,主要存在未保持AIS设备正常开机、AIS设备天线的未连接和安装问题、B级AIS设备质量较差等问题[2]。面对上述问题,传统的船舶流量采集手段难以满足需求,亟待技术革新,因此有必要开发高效的内河船舶检测算法。
1.2 本文的研究目标及布局
本文的研究目标是为实现对内河中运行的船舶进行实时监控并记录。本文以YOLO实时目标检测技术为基础,通过网络爬虫从网上爬取照片,经过人工标记得到数据集,以此来训练神经网络,并扩充了规模,得出了训练时损失函数变化率与置信度变化曲线,对船舶的监测识别进行优化。本文先阐述了研究背景。进而,通过网络爬虫给出了数据集,再通过一个仿真算例,对数据集进行扩充,得出训练后的识别结果。最后,本文提炼出最主要的创新点,对全文进行了总结,并指出了下一步的研究方向。
2 YOLOv1实时目标检测技术基本原理
YOLOv1实施目标检测技术所创造的目标识别系统将物体检测的单独组件集成到一个神经网络当中,使用整个图像的特征来预测每一个边界框,同时预测所有类的所有边界框,以保证能够实现端到端的训练和实时检测速度。
2.1 YOLO的神经网络网络模型结构
卷积神经网络(convolutional neural networks,CNN) 是一种前馈神经网络,使图像可以直接作为网络的输入,避免了传统识别算法中复杂的特征提取和数据重建过程[3]。与传统方法相比,卷积神经网络可以有效解决外界条件影响,更适合内河船舶的目标检测。
卷积神经网络主要由卷积层、池化层和全连接层组成。卷积层与前一层的局部接受域相连,做卷积运算并提取该局部区域的特征。池化层是对上一层的数据进行抽样或聚合,选择该区域的最大值(或平均值)取代该区域,使数据的敏感度大大降低,同时也在保留数据信息的基础上降低了数据的计算复杂度。全连接层在整个卷积神经网络中起到分类器的作用,将学到的分布式特征表示映射到样本标记空间。
YOLO的神经网络结构借鉴了GoogLeNet,拥有24个卷积层、2个全链接层[4],其中,卷积层负责提取图像特征,而全连接层负责预测目标位置以及物体类别,如图1所示。
2.2 YOLO的检测原理与损失函数结构
在训练阶段,系统在接到输入图像之后,首先将输入图像网格化为 N×N个网格。每一个网格产生B个边界框(bounding boxes),以及边界框的置信度 Ci(Confidence Score)。
置信度由如下公式定义[5]:
其中:
表征是否存在物体,存在 =1 ,不存在
=0
表征边界框与实际框的交并比
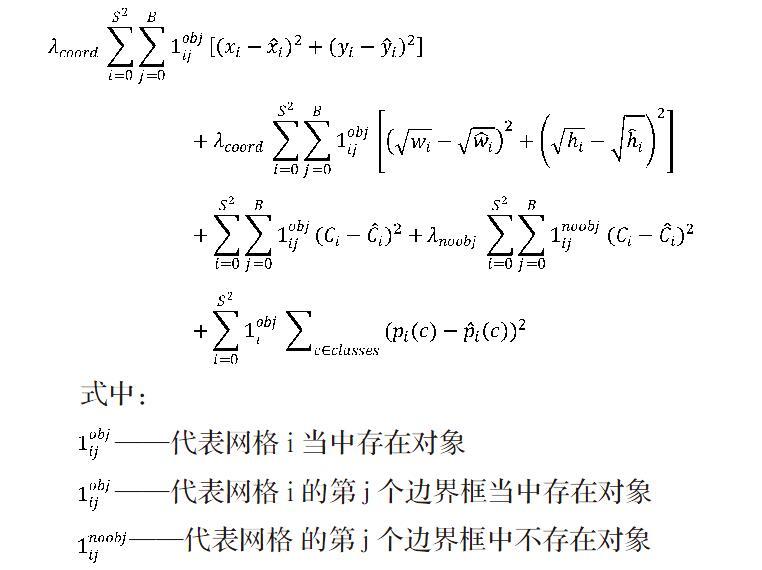
并同时预测已知网格内存在物体的情况下该物体为某个特定物体的条件概率 。从训练集标签中同时获取对象位置 (xi,yi),边界框宽高(wi,hi),对象种类 代入损失函数[5]:
式中:
——代表网格i 当中存在对象
——代表网格i的第j个边界框当中存在对象
——代表网格 的第j个边界框中不存在对象
置信度损失是希望预测的类别更加准确,位置损失希望预测的边界框和先验框的差距尽可能跟真实框和先验框的差距接近,这样预测的边界框就能尽量和真实框一样。在训练过程中,损失函数会计算真实值和预测值之间的误差,从而指导学习的走向,训练出性能较好的预测模型。
经过训练,使得损失函数最小化,从而获得较为理想的参数值。最后测试时,经过非极大值抑制(Non-Maximum Suppression)[6],即可获得较为理想的结果。
3 訓练与测试
3.1 平台与数据集
我们使用PASCAL VOC2007与作者自己收集的数据集训练神经网络。其中,正样本数量为1984个,负样本数量为2000个。正负样本样例如图2所示。
考虑到现实使用环境与我们的数据集规模,我们考虑同时我们还将数据集通过镜像,调整亮度等处理扩充数据集规模,如图3所示。
测试平台使用Ubuntu16,操作系统,CPU型号为Intel Core I5 8400,GPU型号为Nvidia GeForce GTX1070 ,迭代次数设定为10 000次,学习率设定为0.0001,训练集取数据集的70%,测试集取数据集的30%。训练时损失函数变化率与置信度变化曲线图4、图5所示。
3.2 效果测试
训练过程当中,我们参照YOLOv1论文,基于Tensorflow训练YOLO神经网络模型。在完成训练后,我们抽取数据集当中30%的图片做测试集。经过测试,神经网络在测试集图片表现,见表1。
由图6所示,虽然神经网络模型在训练之后对船舶的识别率并非十分优秀,但是识别速度与处理时间可到达实用的程度,基本上可满足在航道中实现对船舶的实时识别与统计的需求。
4 结论与展望
4.1 结论
随着内河水运事业的迅猛发展,内河通航环境日益复杂,船舶航行风险加大,传统的巡航模式已无法满足保障水运监管安全的需要。在现如今计算机计算能力有了空前发展的社会大环境下,基于YOLOv1的实时目标检测技术所带来的高准确率、高帧率以及低延时的实时目标检测可以在内河当中实时监控河道中船舶运行情况,较好地满足了对内河当中船舶运行情况的自动识别与记录,为监管部门实时了解内河船舶运行的情况带来了便利。
4.2 展望
由于模型自身和数据收集的局限性,只从时间序列本身的特性考虑,而没有考虑其他不确定因素的影响。虽然模型中是以随机项来反映这些不确定因素,但在预测期望值中其他不确定因素的影响是无法反映出来的,因而神经网络模型在训练之后对船舶的识别率并非十分优秀,未来研究可以考虑结合多种网络模型。
参考文献
[1] Alex Krizhevsky,IlyaSutskever,Geoffrey E. Hinton.[J/OL]. https://papers.nips.cc/paper/4824-imagenet-classification-with-deep-convolutional-neural-networks.pdf.2012-May.26.2019.
[2] 邱学刚,徐建设,蒋兆明.国内航行船舶船载AIS设备使用现状[J].中国船检,2018,5:42-46.
[3] MEI L, GUO J, LU P, et al. Inland ship detection based on dynamic group sparsity[C].Ninth International Conference on Advanced Computational Intelligence, 2017:1-6.
[4] Christian Szegedy , Wei Liu , YangqingJia , Pierre Sermanet , Scott Reed , DragomirAnguelov , DumitruErhan , Vincent Vanhoucke, Andrew Rabinovich.[J/OL]. https://www.cv-foundation.org/openaccess/content_cvpr_2015/papers/Szegedy_Going_Deeper_With_2015_CVPR_paper.pdf.2015-May,26,2019.
[5] Joseph Redmon, SantoshDivvala, Ross Girshick, Ali Farhadi.[EB/OL].https://arxiv.org/abs/1506.02640. Mon, 9 May 2016-Fri, 30 May 2019.
[6] A. Neubeck,L. Van Gool.[J/OL]. https://ieeexplore.ieee.org/document/1699659.2006-May,26,2019.
猜你喜欢
科技创新与应用(2016年35期)2017-02-21
计算机应用(2016年12期)2017-01-13
科学与财富(2016年28期)2016-10-14
现代电子技术(2015年14期)2015-07-22
