
池塘智能喷药船的设计与试验
2019-11-13 05:31蒋爱德
渔业现代化 2019年5期
蒋爱德,王 硕
(河南牧业经济学院,河南省畜禽健康养殖与智能装备工程技术研究中心,河南,郑州,450011)
2018年,全国淡水养殖面积5 146 460 hm2,其中池塘养殖面积为2 666 840 hm2,占淡水养殖面积的51.82%[1]。池塘养殖过程中,由于残饲、排泄物、死亡的水产动物等原因,需要定期对池塘喷施药物进行防病治病[2-3],在池塘养殖中施药防病治病依然是主流[4-6]。在大面积池塘养殖中施药依然需要靠人驾船来实施,增加了养殖者的劳动强度,还容易造成喷药不均匀现象。此外,在喷药过程中由于药物的刺激对操作人员的健康也不利。利用航模技术、通讯技术、单片机技术设计了一款池塘自动喷药船,装满药液后,通过以Android智能手机为平台开发的APP作为控制端来控制喷药船的行进路线,喷药船边行边喷洒药物,达到减少劳动强度、科学施药的目的。
1 系统组成及原理
1.1 系统组成
智能喷药船除船体外,主要由电源模块、控制模块、GPS定位模块[7]、GPRS无线传输模块[8]、机电模块和安装控制软件的智能手机组成(图1)。电源模块负责所有模块的供电;控制模块用来对其他模块进行实时控制和数据处理;GPS定位模块主要获取喷药船的位置信息,并通过单片机传给GPRS模块;GPRS模块主要负责喷药船位置信息的发送和手机指令的接收;机电模块主要控制喷药船的螺旋桨电机、舵机和喷药电机的启动和停止;智能手机用来规划喷药船的行进路线,并对喷药船的机电模块进行远程控制。

图1 池塘喷药船控制系统示意图
1.2 系统原理
智能手机发出指令传给服务器,控制模块从服务器获取到指令传给机电模块控制喷药船前进、转向和喷药。在喷药船前进的同时,船上的GPS芯片采集定位数据传给控制模块,控制模块通过GPRS将数据传送到服务器,智能手机从服务器获取喷药船位置坐标数据后,以船前进方向为基准与即将到达的规划点坐标进行数学计算,计算出的夹角即为喷药船的转角(图2),该数据通过智能手机APP发送到服务器,控制模块获取转角数据后传给机电模块,由此实现舵机的转向功能。
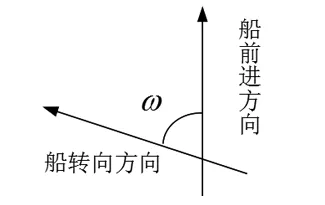
图2 喷药船转角示意图
2 系统硬件设计
2.1 通讯模块
由单片机组成的控制模块、GPS定位模块和GPRS无线传输模块实现系统的通讯和控制(图3)。系统的核心是单片机,为便于开发,系统采用目前流行的Arduino开发板[9-10]。Arduino是一款便捷灵活、方便上手的开源电子原型平台。系统采用Arduino系列中的Arduino UNO来进行开发,该处理器核心是ATmega 328,同时具有14路输入/输出口(期中6路可作为PWM输出),6路模拟输入,一个16MHZ的晶体振荡器,一个USB接口,一个电源插座,一个ICSP header和一个复位按钮。
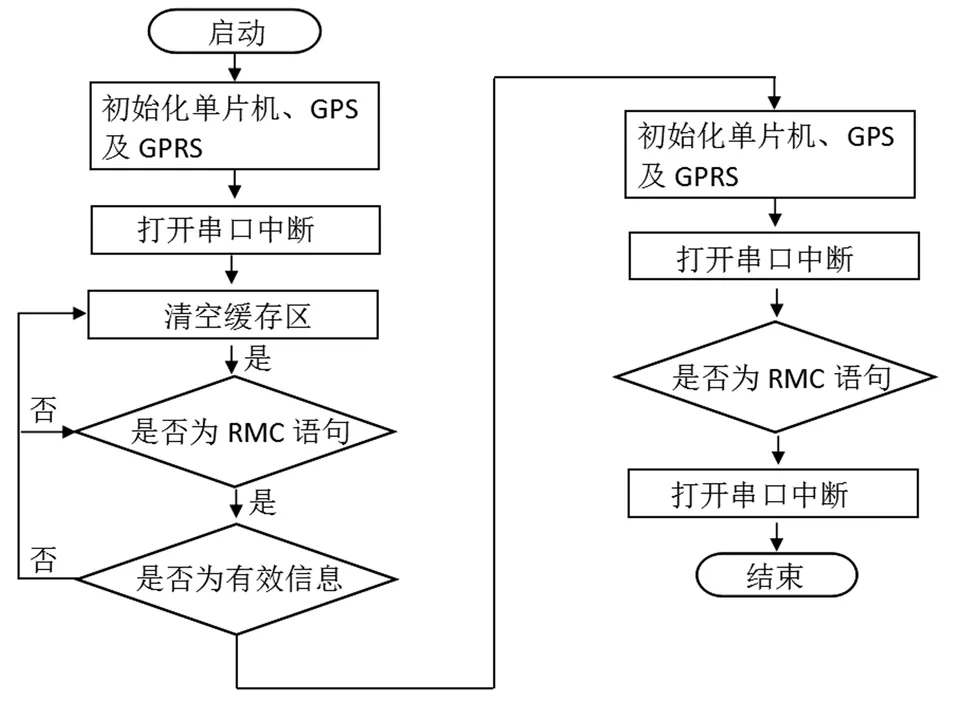
图3 通讯流程
GPS定位模块包括GPS接收机天线和接收机主机两个单元。天线单元的主要功能是将GPS卫星信号非常微弱的电磁波转化为电流,并进行放大和变频处理;而接收机单元的主要功能是对经过放大和变频处理的信号电源进行跟踪、处理和测量。GPRS网络提供UDP和TCP两种传输协议。UDP协议不提供可靠性连接,不能保证把数据发送到目的地,而TCP协议则提供一种可靠的面向连接的字节流运输服务。本文通讯模块、移动终端与服务器之间的通讯协议均采用TCP/IP协议。
2.2 机电模块
机电模块除了电源外还包括Arduino平台连接一个5 V舵机和12 V直流的继电器。继电器控制一个喷雾水泵和一个12 V直流电机,直流电机连接螺旋桨给船提供动力。智能喷药船依靠舵机控制船的转向。舵机是一种位置伺服驱动器,其控制信号周期为20 ms的脉宽调制(PWM)信号,其中脉冲宽度0.5~2.5 ms,相对应的舵盘位置为0°~180°,呈线性变化。也就是说,向服务器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。舵机内部有一个基准电路和一个比较器。基准电路产生周期为20 ms、宽度1.5 ms的基准信号,比较器将外加信号与基准信号相比较,判断方向和大小,从而生成电机的转动信号。
3 系统软件设计
3.1 服务器端设计
服务器端是一台具有独立IP地址的计算机,便于手机与服务器通讯。微软的WCF技术[11]允许创建服务,访问跨进程、机器和网络的其他应用程序。在数据库应用中,客户端生成数据操作请求,对应的请求参数会被WCF序列化为XML[12]信息集并捆绑到请求消息中发送到服务器端,服务器端解析后将信息存储到数据库;其操作的返回值及输出参数又会被序列化为XML信息集并捆绑到回复消息中发送到客户端。数据库对每个用户生成一个包含用户注册信息以及池塘编号的用户信息表,以及根据池塘编号生成的数据采集信息表(表1)。一个用户名下可以有多个数据采集信息表。

表1 数据采集信息表
3.2 客户端设计
客户端采用目前流行的Android应用程序[13]进行设计开发,设计的APP应用程序使用 HTTP 协议及XML语言进行数据传输。软件功能包括用户登录、池塘轮廓数据采集、池塘地图生成,更重要的是通过服务器实现与智能控制船硬件之间交互,对智能喷药船进行控制。
客户端软件算法的核心是路径规划。对于在静水环境的无人船路径规划,Warren等[14]提出了适用于实时的局部路径规划的势场法;Alvarez等[15]利用遗传算法进行路径规划,但计算速度较慢;Petres等[16]改进了快速匹配算法,考虑到船的操纵性约束,可是只能实现二维计算。目前应用最多的是基于视线法(Line of Sight,LOS)的循迹控制算法。对于循迹控制算法,FOSSEN等最早利用离散点的直线连接追踪和矫正航迹;Breivik等[18]进一步提出了针对曲线路径的LOS循迹方法,但在循迹过程中容易出现反应迟缓和跟踪缓慢等现象。在智能喷药船的应用环境中,由于池塘的水是静水,可以忽略水流速度。并且由于池塘的地形所限,所以在进行路径规划的时候,既有直线寻迹,也有曲线路径寻迹。本文针对池塘环境的特点,提出了修正的LOS循迹方法:智能喷药船在循迹时,客户端时刻获取喷药船所在位置点坐标,并从数据库中调取喷药船驶过的规划点和即将到达的规划点坐标,首先计算两个规划点之间的夹角φ,如式(1)所示。如果φ≤ε(ε为船的艏向角),可以认为是直线循迹,通过公式(2)计算出船行进的夹角θ0来调整船的行进方向。
(1)
(2)
式中:(x,y)—船行进中当前位置点坐标;(x1,y1)—喷药船驶过的规划点坐标;(x2,y2)—即将到达的规划点坐标,坐标点通过GPS定位系统获得,单位为度。
如果φ>ε,则认为是曲线循迹,为了使船转向平稳,通过插值运算,根据最大艏向角ε转向,利用格式(3)、(4)计算出船插值的点数n,并计算出船最后行进的夹角θ1,如图4所示。
(3)
(4)
式中:ε—最大艏向角;n—船插值的点数;θ1—最后行进的夹角。
在实际应用过程中,用户围绕池塘一周采集基本数据,或者调入采集的池塘轮廓数据,手机APP除了生成池塘轮廓图外,客户端还自动规划喷药船“S”形循迹路线。客户端APP软件操作流程见图5。
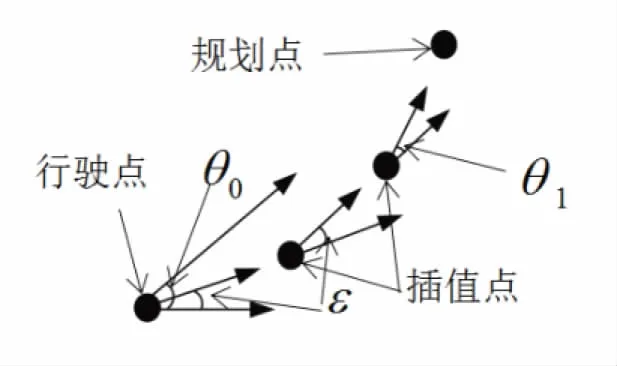
图4 曲线寻迹示意图
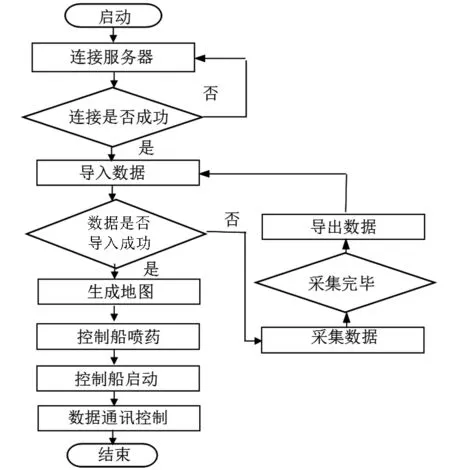
图5 客户端操作流程图
4 试验与分析
4.1 试验过程
试验用喷药船(图6)船体长0.3 m,船速约0.7 m/s,舱容积约5 L。
喷药船喷嘴采用直径0.3 mm的低压雾化喷头,覆盖1 m2水域面积。低压雾化喷头,其流量公式[19]为:
(5)
式中:Q—喷头流量,m3/s;Cd为喷头的流量系数;d为喷头直径,m;p为喷头的工作压力,Pa;ρ为水的密度,kg/m3。

图6 试验用喷药船
由于池塘的用药浓度按照每毫升水中的含药量计算,1 mg/L即为1 L水中用药1mg,其公式为:
M=VC
(6)
式中:M—用药量,g;V—池塘水体积,m3;C—用药质量浓度,mg/L。
在实际操作过程中,可以根据船速和船的容积,按照船每小时工作面积计算用药量。
试验选取一块洁净无杂草的池塘,并在当天无风的条件下进行。池塘大约0.4 hm2(6亩),呈长方形,长宽比约为。在进行路径规划时,直线距离规划点选取较远,在拐角处选取间隔点较近进行测试。将试验船装满水,放入测试水域进行测试。
4.2 结果分析
智能喷药船的最大施药面积约为252 000 m2/h,喷施效率约为人工的6.5倍。在试验中也发现,初始位置艏向角和曲线循迹对喷药船的转向控制影响较大。
4.2.1 喷药船初始位置艏向角对航行的影响
卜仁祥等[20]利用Matlab下Simulink仿真环境针对不同航速和干扰情况下的航迹控制进行了仿真计算和对比分析,发现艏向角小于20°航迹比较平滑。邱荷珍等[21]利用MARIN开发的软件DPSIM,对船舶跟踪预设轨迹进行时域模拟,发现艏向小于60°时,船的姿态通过调整能与轨迹重合。艏向小于15°时,船的姿态漂移半径和艏向角偏差的时历曲线重合很好。试验也证明,艏向与轨迹线方向的夹角小于60°时(图7),喷药船仍能循迹。但当艏向与轨迹线方向的夹角大于30°时,喷药船姿态调整不到位,喷药船会撞向堤岸(图8)。当艏向与轨迹线方向的夹角大于60°时,喷药船行驶轨迹与规划轨迹完全分离,循迹失败。当艏向与轨迹线方向的夹角小于15°时,喷药船行进方向与规划轨迹接近。根据试验结果,可以将艏向角设为15°。为了保证开始时循迹正确,喷药船应该放置在设定的轨迹起点附近,且艏向应与轨迹方向相近。在实际操作过程中,将船放置的方向应与堤岸平行,并尽量放在轨迹线的延长线上。
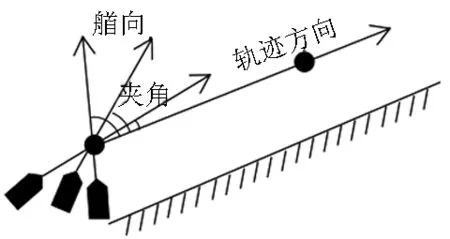
图7 初始位置艏向与轨迹方向示意图
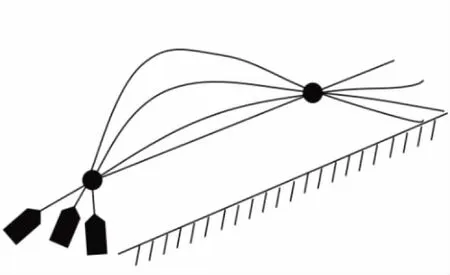
图8 喷药船初始轨迹示意图
4.2.2 喷药船曲线循迹对航行的影响
在实际的无人船曲线循迹控制应用中,如圆弧半径取值过小,会使船舵的性能达不到回转性能要求,造成实际路径与规划路径不吻合;如圆弧半径取值过大,则造成实际路径与直线连接路径产生较大的偏移。徐海洋、韩鑫等对此做了相关研究[22-23]。在智能喷药船控制系统中,客户端自动规划为“S”形循迹路线(图9)。喷药船在行进过程中需要多次转弯,在循迹控制中属于曲线循迹。

图9 喷药船“S”形循迹示意图
如果把船当成一个质点,那么这个质点做圆周运动的公式为:
v=ωr
(7)
式中:v—线速度,m/s;ω—角速度,rad/s;r—半径,m。
由于式(7)中v已知,ω和r均未知。如果分别取不同的值,可以得到不同的结果。试验表明,半径越大,曲线越平滑,船行进越平稳。为了达到喷药覆盖面和船速平稳的统一,在试验中选取ω在1v/2~2v/3之间,能够达到试验要求。在试验过程中,发现船在拐弯处的行进路径与规划路径有偏差,但在容许范围内,据分析,这与通讯延迟[24-25]有关。
4.2.3 改进与提高
通过试验发现喷药船存在不足之处,一是要求池塘中无杂草,否则会对螺旋桨和舵缠绕导致无法使用;二是许多池塘中添加了增氧等设备,这对于智能喷药船的防碰撞要求增加,还需要研究防碰撞;三是在喷头流量和船速不变的情况下,通过动态改变路径规划,保证喷药船在规定的时间、规定的区域喷药完成,还需要进一步计算研究。
5 结论
智能喷药船可通过智能手机规划路径并进行远程控制,实现了喷药船循迹自主航行,改变了传统的人工喷药模式。试验表明,与人工相比,效率增加6.5倍,劳动强度减少90%以上,而且具有安全、高效、施药均匀、自动化程度高等优点,尤其在大面积水产养殖中,能够代替繁重的人工施药劳动。随着5G技术的发展应用,设备之间的通讯将更加快捷及时。水产养殖喷药方式自动化、智能化将是发展趋势。
□
猜你喜欢
新作文·高中版(2022年5期)2022-11-22
新作文·高中版(2022年5期)2022-11-22
——稳就业、惠民生,“数”读十年成绩单
人民周刊(2022年17期)2022-10-21
湘潭大学自然科学学报(2022年2期)2022-07-28
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
农家参谋(2020年6期)2020-07-29
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
电子制作(2017年1期)2017-05-17
声屏世界(2015年7期)2015-02-28
