
Duffing混沌的轨迹跟踪控制仿真实验
2019-11-13 08:40颜世玉于清文赵海滨
科技创新导报 2019年17期
关键词:仿真实验
颜世玉 于清文 赵海滨

摘 要:根据Duffing混沌系统和期望轨迹建立轨迹误差系统,采用线性滑模面和双幂次趋近律设计滑模控制器,并采用滑模控制器进行轨迹跟踪控制。采用Simulink软件建立仿真实验系统。仿真结果表明,滑模控制器能够进行Duffing混沌的轨迹跟踪控制,轨迹跟踪误差渐进收敛到零。
关键词:滑模控制器 Duffing混沌 轨迹跟踪 仿真实验
中图分类号:TP273 文献标识码:A 文章编号:1674-098X(2019)06(b)-0009-03
Abstract:According to the Duffing chaos and the desired trajectory, trajectory tracking error system is established. The sliding mode controller is designed by linear sliding mode surface and double power reaching law. The sliding mode controller is used for trajectory tracking control. The simulation experiment system was built by Simulink software. The results show that the sliding mode controller can perform trajectory tracking control of Duffing chaos, and the trajectory tracking error converges to zero gradually.
Key Words:Sliding mode controller; Duffing chaos; Trajectory tracking; Simulation experiment
混沌是非线性系统普遍存在的现象,广泛存在于自然界和人类社会中。Duffing混沌是典型的二阶严反馈系统[1-2],只采用单一的控制输入就能实现轨迹跟踪控制。滑模控制对模型误差和外部干扰信号具有很强的鲁棒性,并具有响应速度快和容易实现等优点[3]。滑模控制器的设计中常用的趋近律有指数趋近律、幂次趋近律和双幂次趋近律等[4-5]。
本文根据Duffing混沌系统的状态方程和期望轨迹建立轨迹跟踪误差系统,采用线性滑模面和双幂次趋近律设计滑模控制器,最后采用滑模控制器进行Duffing混沌的轨迹跟踪控制。采用Simulink软件建立仿真实验系统,仿真结果表明,滑模控制器能够进行Duffing混沌的轨迹跟踪控制,轨迹跟踪误差渐进收敛到零,轨迹跟踪的速度比较快。
1 Duffing混沌的轨迹跟踪误差系统
Duffing混沌为二阶非线性系统,状态方程为
(1)
其中,x1和x2为系统的状态变量,p1,p2,p3和ω为常数。当参数选择为p1=-1,p2=0.25,p3=0.3,ω=1时,Duffing系统会出现混沌现象。
对于Duffing混沌系统,状态变量x1的期望轨迹为xd,状态变量x2的期望轨迹为。xd为连续函数,具有二阶导数。Duffing混沌系统的轨迹跟踪误差定义为
(2)
对轨迹跟踪误差进行求导,可以得到轨迹跟踪误差系统为
(3)
其中,。
期望轨迹设定为
(4)
带有控制输入的轨迹跟踪误差系统为
(5)
其中,u为控制输入。通过控制输入u对轨迹跟踪误差系统进行平衡控制,轨迹跟踪误差渐进收敛到零,实现Duffing混沌系统的轨迹跟踪控制。
2 滑模控制器
对于Duffing混沌轨迹跟踪误差系统,采用线性滑模面和双幂次趋近律设计滑模控制器,并采用滑模控制器进行Duffing混沌系统的轨迹跟踪控制。
在滑模控制器的设计中,采用的线性滑模面为
(6)
其中,k1为常数,且k1>0。
在滑模控制器设计中,双幂次趋近律表为
(7)
其中,,,,。
采用线性滑模面和双幂次趋近律设计的滑模控制器为
(8)
3 仿真实验
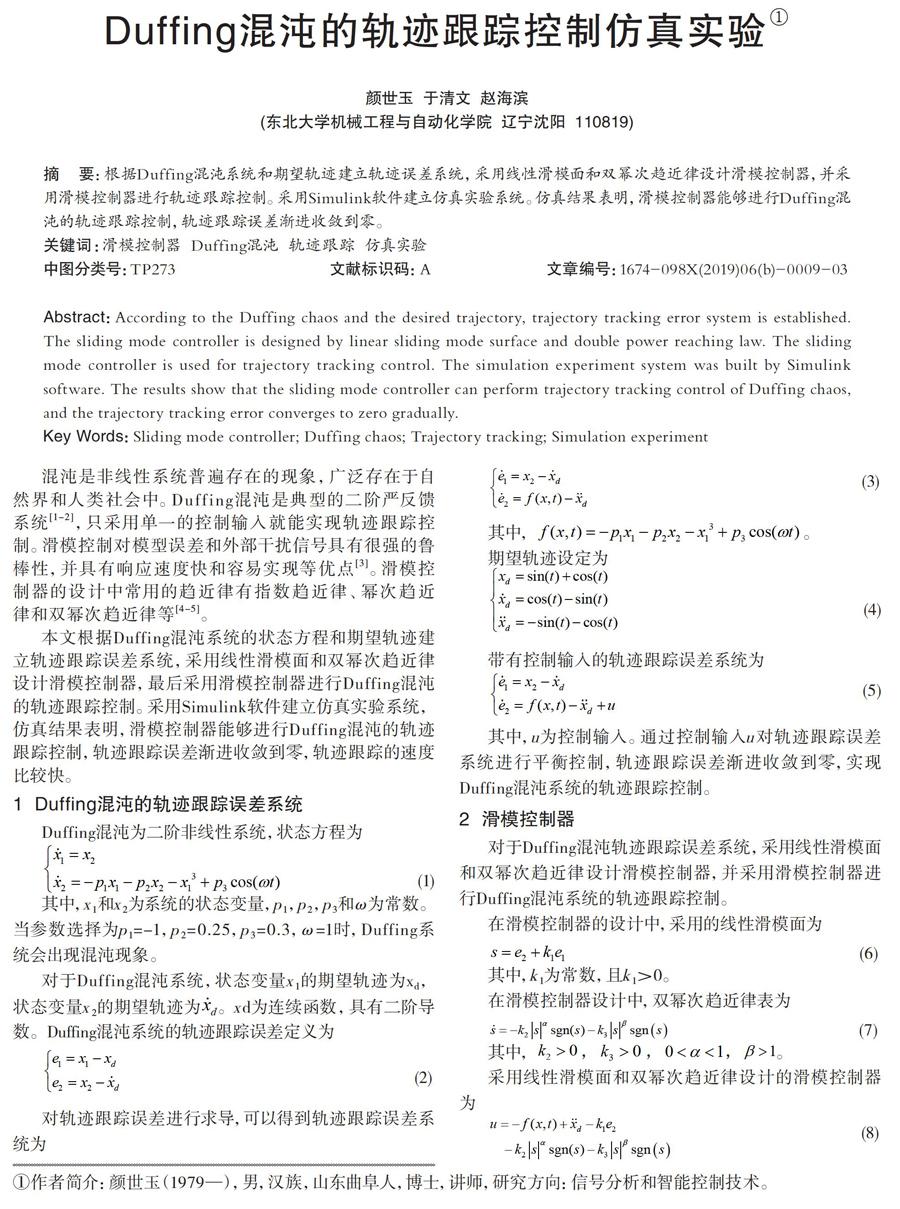
Simulink软件是MATLAB软件的重要组成部分,可以非常方便的进行虚拟仿真实验[6]。本文采用Simulink中的MATLAB Function模块和积分模块等建立Duffing混沌的轨迹跟踪控制仿真实验系统,MATLAB Function模块内采用MATLAB语言进行编程[7-8]。本文采用线性滑模面和双幂次趋近律设计滑模控制器,只采用单一的滑模控制器进行Duffing混沌系统的轨迹跟踪控制,轨迹跟踪误差渐进收敛到零。
采用Simulink软件进行Duffing混沌系统的轨迹跟踪控制仿真实验,采用变步长的ode45算法,最大步长为0.0001s,仿真时间为6s。Duffing混沌系统的初始状态设定为,。期望轨迹的初始状态为,。轨迹跟踪误差的初始状态为,。Duffing混沌系统轨迹跟踪控制的仿真实验系统,如图1所示。
在线性滑模面中,参数设定为k1=4。在双幂次趋近律中,参数设定为k2=2,k3=2,α=0.6,β=1.4。滑模控制器的控制输入,如图2所示,采用双幂次趋近律的滑模控制器比较平滑,没有出现抖振现象。滑模面的响应曲线,如图3所示,滑模面快速收敛到零。轨迹跟踪误差的响应曲线,如图4所示,轨迹跟踪误差渐进收敛到零,收敛的速度比较快。仿真结果表明,采用线性滑模面和双幂次趋近律设计的滑模控制器能够进行Duffing混沌的轨迹跟踪控制,轨迹跟踪误差渐进收敛到零。
4 结语
本文根據Duffing混沌系统和期望轨迹建立轨迹跟踪误差系统,采用线性滑模面和双幂次趋近律设计滑模控制器,并采用滑模控制器进行Duffing混沌的轨迹跟踪控制。采用Simulink软件建立仿真实验系统,该仿真实验比较形象和直观,有助于学生对混沌控制和滑模控制等的理论理解和工程应用。
参考文献
[1] 王晓东,杨绍普,赵志宏.基于改进型Duffing振子的微弱信号检测研究[J].动力学与控制学报,2016,14(3):283-288.
[2] 张菁,章文俊,宋万清. Duffing-Holmes振子在刀具磨损检测中的应用[J]. 轻工机械,2015,33(1):52-55.
[3] 刘金琨. 滑模变结构控制MATLAB仿真(第3版)[M]. 北京:清华大学出版社,2015.
[4] 张合新,范金锁,孟飞,等.一种新型滑模控制双幂次趋近律[J].控制与决策,2013,28(2):289-293.
[5] 李慧洁,蔡远利.基于双幂次趋近律的滑模控制方法[J]. 控制与决策,2016,31(3):498-502.
[6] 石良臣.MATLAB/Simulink系统仿真超级学习手册[M],北京:人民邮电出版社,2014.
[7] 薛定宇.控制系统计算机辅助设计-MATLAB语言与应用(第3版)[M]. 北京:清华大学出版社,2012.
[8] 赵海滨.MATLAB应用大全[M].北京:清华大学出版社,2012.
猜你喜欢
商情(2017年1期)2017-03-22
中国教育技术装备(2016年19期)2016-12-27
考试周刊(2016年64期)2016-09-22
中国教育技术装备(2015年22期)2016-01-09
现代电子技术(2015年17期)2015-09-23
科技与创新(2015年18期)2015-09-11
中国教育技术装备(2015年12期)2015-07-21
中国人口·资源与环境(2015年2期)2015-04-16
