
基于电压补偿的伪微分反馈PMSM电流预测控制
2019-12-02 01:11刘细平袁长征丁卫中
微电机 2019年10期
刘细平,袁长征,丁卫中
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
永磁同步电机(PMSM)具有功率密度高、结构可靠性高、扭矩大等优势。在无人机、电动汽车、风电等领域得到了长足的发展[1]。PMSM控制系统是具有多耦合,非线性、变参数的复杂系统。传统控制系统广泛采用PI控制器的双闭环矢量控制策略,PI控制器利用给定值和采样数据误差进行调节,但在数字控制系统中电流电压采样,以及占空比的更新,逆变器的输出都伴有滞后性,使电机系统中有较多的谐波产生,从而出现转矩脉动,影响电机系统的控制性能。为此,专家学者通过将具有良好电流动态性能的电流预测方法[2]和模型参考自适应[3],抗扰动观测器[4]等控制方式加入到永磁同步电机控制系统当中,使得控制系统的抗干扰性,鲁棒性能得到了较大提升。文献[5]提出的改进预测控制方法,降低了控制系统对参数的依赖性,避免稳态误差。而对于谐波电流的抑制,一方面从电磁场理论出发,优化电机本体结构设计,减小气隙磁场畸变为主[6]。另一方面在电机控制算法上,采用电压与时间补偿法等方式来抑制谐波[7-8]。文献[9]为了体现预测电流算法跟踪性能的优势,将预测电流控制和PI控制器两种调节方式进行分析比较。文献[10]中为了提高控制电流的精度,减小谐波,采用积分补偿,但提升效果并不理想,且积分增益的数学公式选择复杂繁琐,不易实现。
PDF控制策略由康奈尔大学教授理查德提出,通常在前馈回路和反馈回路中分别加入积分运算和微分运算。它具有比传统PID控制器更强的抗负载特性以及暂态响应特性。并且对系统参数依赖性较小,计算量较小[11]。文献[12]利用PDF控制策略搭建了电机控制系统,证明了PDF控制抗负载扰动的能力的优越性。
本文提出在基于电压补偿的电流预测控制中加入PDF控制模块取代PI转速调节环,以减弱传统PI转速环对系统参数变化或外部干扰影响,同时为了发挥预测控制对电流跟踪的优势,利用预测电流模型对谐波电流提取,并进行电压补偿,使得PMSM控制系统对电机模型参数的依赖性降到最小,不仅增强了系统的鲁棒特性,提高电机启动性能,减弱转矩脉动,同时这种算法较简单,易于实现。通过仿真实验结果的对比,验证了此方案的有效性。
1 永磁同步电机的数学模型
永磁同步电机并非是简单的的线性时不变系统,而是一个随着时间变化的高阶非线性系统,具有多控制变量,且变量之间耦合性强。为便于研究忽略磁路饱和,不计铁芯涡流,三相绕组对称,转子磁场以及定子磁场在气隙中正弦分布。则PMSM在两相旋转dq坐标系的电压方程为
(1)

式中,ud、uq、id、iq分别为电机在直轴和交轴的定子电压,定子电流的分量,Ld、Lq为直轴和交轴电感,ωr为机械角频率,Rs为定子电阻,ψf为永磁体磁链,ΔLd,ΔRs,ΔLq,Δψf主要是由于控制系统扰动造成的参数误差值。
永磁同步电机是一种三相三线制系统,定子绕组电流一般只存在奇数次谐波,同时各次数谐波都互相相差2nπ/3,则三相电流关系如下:
(2)
式中,ia、ib、ic为定子三相电流的n次谐波电流,im为电流幅值,φn为谐波电流初始相位角。
2 PDF控制器模块
2.1 PDF控制原理
传统PID控制原理是电机控制中一种应用较广泛的控制方式,它具有系统响应快,算法易于实现等优点,但也同时伴随着积分饱和以及微分突变的问题,这两种问题的出现会对控制系统产生较大的影响[13]。专家学者针对上述问题的解决做出了许多的探索,PDF控制策略的引入,能够较好的解决上述问题。该控制系统结构如图1所示。

图1 二阶PDF控制系统结构
控制对象的精确模型不易获得,PDF控制可以在简化的数学模型下,利用积分环节为主要控制环节实现多种输入误差的响应,减弱外部扰动等不确定因素对积分环节调节的影响以及具备较好的控制灵度度。从图1中可以看出系统反馈直接与微分环节相连,直接得到微分反馈信号,可以有效保证系统稳定性,同时可以对微分突变的问题起到一定的抑制作用,所以命名为伪微分反馈(PDF)。
2.2 PDF模块设计
控制系统结构如图1所示,根据文献[14]中的设计方法分别对ki、kd1、kd2三个参数进行设定,公式为
ki=6.52(Mmax/r0Is)1.5
(3)
kd1=8.53(Mmax/r0Is)
(4)
kd2=4.13(Mmax/r0Is)0.5
(5)
式中,Mmax为末级控制元件的最大输出电压;r0为系统阶跃响应输入的最大值,通常设定为给定值,Is为被控对象数学模型的最大阶项系数。
3 电流预测控制器
设计无差拍电流预测控制器的目的就是利用电流预测具有良好的动态响以及较低的谐波含量,使控制系统的动态响应性能得到提高。
根据PMSM电压模型可做如下状态方程:

(6)
其中,

通常认为一个控制周期Ts内,系统的输入电压和反电势式恒定的。这样对式(6)离散化,可得:
i(k+1)=Akik+Bkuk-Dkfk
(7)

其中,K为离散值,我们在KTs时刻进行采样来预测当前时刻的电压值,使得在(K+1)Ts采样时刻能够得到上一时刻的给定电流值。
(8)

由预测电流得到电压方程式为
(9)
由式(9)计算得出电压矢量值,通过SVPWM调制作用于逆变器,从而驱动电机运动。同时从式(9)可以看出其中扰动量fk的精确度对预测结果有较大的影响,为了进一步发挥预测控制的优势,本文利用预测原理加入一种谐波预测补偿模块,改进其预测控制效果。
4 谐波预测补偿模块
永磁同步电机在理想的状态运行中定子三相电流呈现理想的正弦波形,由于电机本体磁场畸变和逆变器等硬件延时,以及复杂算法在实际运行产生的客观误差都使得电机电流中含有较多的谐波,使得电机定子电流产生不同程度的畸变。其中5、7次谐波对电机电流起主要的影响,并对电机运行转矩的波动有较大的干扰[15]。因此本文主要对5、7次谐波建立数学模型并利用电流预测模型对控制系统进行电压补偿。
根据定子绕组电流式(2)设PMSM定子绕组谐波电流可表示为
(10)
式中,im、i5、iy分别为基波,5次谐波,7次谐波电流幅值,φ1、φ2、φ3为基波和谐波的初始相位角。对式(10)进行坐标变换得到基波dq坐标系下的电流:
(11)
在提取谐波电流过程中首先采用基波同步坐标系转换三相电流谐波电流,并通过低通滤波器进行滤波再直接利用,这样做对系统参数依赖性较大,而常规PI控制器无法对电流等周期信号达到无误差跟踪调节的要求[16],本文利用PDF调节器对滤波之后电流进行调节,利用其对系统参数依赖性低,计算量较小的特点,提高谐波提取精度。

图2 谐波扰动电流提取模块

(12)
从式(12)可知系统要得到较完整的谐波解耦补偿,根据转速的变化适时补偿谐波影响是重要的过程。而在谐波电流由三相坐标轴系下变换到dq轴下的谐波电流式(11)可以看出5次谐波的旋转方向与基波向量旋转相反,而7次谐波向量的旋转方向与基波向量方向相同。此时在dq坐标轴系下的谐波电压旋转稳态方程为
(13)
式(13)是在dq同步坐标系下表示的谐波稳态电压方程,将5次与7次谐波转化为直流量。依据同步坐标变换原理,将同步旋转dq轴系的直流量公式分别变换为5次谐波和7次谐波对应下dq同步旋转坐标轴系,这样在5次谐波dq同步旋转坐标轴系下,只有5次谐波分量是直流分量,此时基波分量和7次谐波分量都为交流分量。在7次谐波情况下同理。
由基波dq轴旋转坐标系变换到5次谐波dq轴系的变换公式为
(14)
由基波dq轴旋转坐标系变换到7次谐波dq轴系的变换公式为
(15)
根据以上分析可以得出在5次谐波对应同步dq轴坐标系下,此时的5次谐波电压方程为
(16)
同理变换到7次谐波对应的同步dq坐标轴系下的7次谐波电压方程为
(17)
根据以上的分析,图3给出了有关5次谐波电流预测抑制模块原理图,给定5次,7次谐波的期望值与经过采样后提取出的谐波电流经过电流预测模块,得出了5次预测谐波电压补偿量。7次谐波预测抑制模块同理。
最后由于5次,7次谐波电压补偿量是在基于5次谐波,7次谐波对应的dq旋转坐标轴系下实现的,在加入控制前馈补偿之前需要将谐波电压补偿量由相对应的次数谐波dq同步旋转轴系转化为基波dq轴旋转坐标轴系。转化过程如图4所示。

图4 谐波补偿电压坐标变换模块
5 仿真结果及对比分析
为了验证所设计的控制策略的效果,在Matlab/Simulink环境下进行了仿真验证。所采用的IPMSM参数如表1所示。

表1 PMSM参数表
IPMSM控制策略整体结构图如图5所示。

图5 控制系统框图
本文将所采用的控制策略与传统的PI双闭环控制策略进行仿真效果对比,首先给定电机转速值为800 rad/min,整个仿真运行时间为0.4 s。为了直观的体现本文所提控制策略的控制性能,将电机设置处于突加减负载的运行状态。当电机到达指定转速时,在0.15 s时加入10 N·m的负载,经过0.3 s时减去负载。图6为两种控制策略在加减负载的转速响应曲线,可以看出传统PI控制策略的转速响应曲线在变负载的工况下,出现了明显的波形变化,并且可以看出本文控制策略电机到达指定转速的速度比PI控制策略更加的迅速,且可以较平稳运行。体现出本文控制策略可以在变负载工况下有很好的响应特性。

图6 加减负载转速曲线对比
图7为在电机加减负载的过程中转矩变化的曲线对比。从图中可以清晰的对比出,两种控制策略在转矩响应中的性能,PI控制转矩曲线较本文策略波动较大,当负载变化时出现了明显的不规则波动,而本文控制策略较平稳,表现了较强的鲁棒性,特别是在图中可以看出本文控制策略的初始转矩更大,相比传统PI只能达到36 N·m的初始转矩,本策略到达了48 N·m左右,并且能够在短时间内趋于稳定。图8为两种策略在加减负载的工况中定子三相电流波形图,从中可以很好的反映本文所采用的策略具有更好的电流响应特性,正弦度更高,电流动态性能较好。

图7 加减负载转矩响应变化曲线

图8 加减负载定子电流响应对比曲线
图9分别给出了本文控制策略与传统PI控制在电机突加减负载的A相响应电流波形曲线,可以对比出图9(a)PI控制策略的电流曲线杂波较多,导致电流出现较大畸变。而图9(b)的波形正弦度较好,谐波较少。
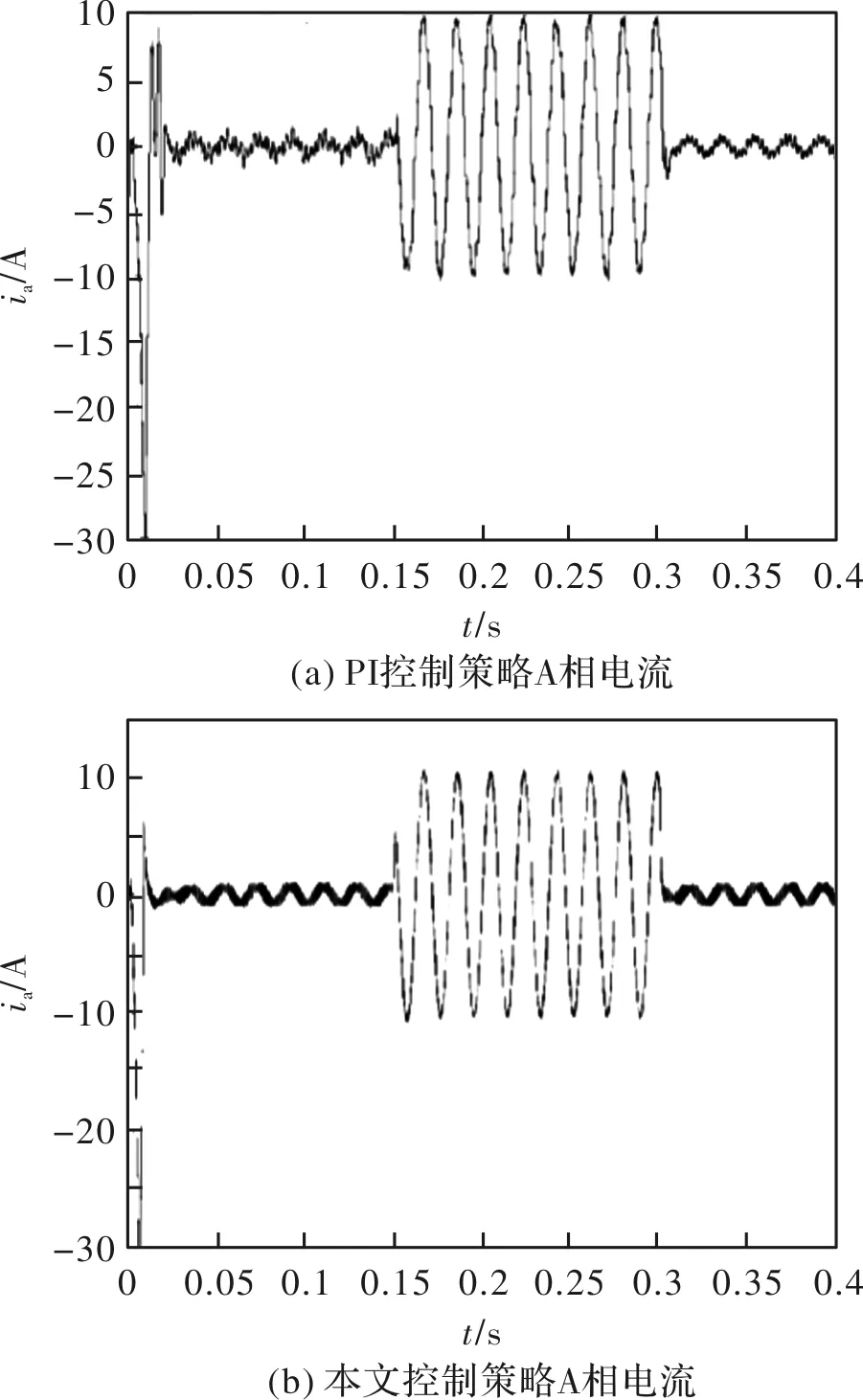
图9 A相电流对比曲线
两种控制策略A相电流经FFT变换得到频谱图。图10则是两种策略A相电流谐波含量对比。图10(b)A相电流中5次,7次谐波都降低到1%以下的含量,相比传统PI控制策略的5次,7次谐波8.5%和7.3%的含量,谐波抑制补偿模块的加入,使得电流谐波含量有较明显的降低,对控制系统转矩脉动的抑制起到了较好的作用。

图10 A相电流频谱对比
6 结 论
本文在永磁同步电机矢量控制的基础上,用PDF控制模块代替传统PI转速环,减小转速响应超调,提高转速响应速度。同时为了改善电流响应性能,提升系统电流跟踪效果,利用无差拍电流预测控制模块,加入了融合PDF模块和预测电流模块对谐波电流进行负载前馈电压补偿,该控制策略具有良好的电流控制性能,以及较好变负载抗扰动能力,响应快、振幅较小等优势,具有较强的鲁棒性。为永磁同步电机复合控制策略提供了一种新的方法。最后搭建了PMSM控制系统仿真模型,完成了电机启动、负载转矩变化以及分析了相电流频谱的仿真实验,实验结果证明了该方法的有效性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
防爆电机(2022年4期)2022-08-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
测控技术(2022年3期)2022-03-25
防爆电机(2021年6期)2022-01-17
水下无人系统学报(2021年6期)2022-01-15
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
通信电源技术(2020年24期)2020-05-06
客车技术与研究(2015年3期)2015-08-24
