
一种基于FCM的噪声图像分割算法研究∗
2019-12-04 06:12周宁亚王家成
新疆大学学报(自然科学版)(中英文) 2019年4期
周宁亚,王家成
(1.安徽理工大学电气与信息工程学院,安徽 淮南 232001;2.阜阳师范学院物理与电子工程学院,安徽 阜阳 236041)
0 引言
图像分割[1−3]被认为是图像处理应用中的前一级步骤,如图像压缩、图像识别、目标检测等.在图像分割的应用中,军事、医学等方向特别需要对噪声图像进行分割.模糊C均值(FCM)[4]作为一种模糊聚类算法,具有同时处理图像分割和噪声去除两个问题的潜力.近年来,针对存在文献[5−7]噪声的图像进行分割,提出了多种基于FCM的算法.第一个值得注意的尝试是FCM-S[5],该方法克服了MRI图像分割中存在的强度不均匀性.EnFCM[6]被认为是FCM的另一种改进,对噪声图像采用线性加权滤波,然后对图像的强度直方图进行FCM.上面两种算法都与一个调优参数有关,称为α,所以它们的适用度受到很大限制.后来就提出FGFCM[7]算法,以减少以前修改的参数依赖性,它仍然有两个调优参数,分别为λs和λg,这些算法都依赖于各自的调优参数,它需要有关噪声类型和噪声程度的先验信息.
针对以上问题,有学者提出用群智能算法进行优化FCM,文献[8]提出使用粒子群(PSO)优化算法与FCM相结合的方法,但是由于PSO本身算法寻优速度慢,易出现早熟现象,使得分割精度不高.对此本文提出了一种新的基于FCM的噪声图像分割算法,与改进的PSO优化算法和小波变换相结合.该算法不仅解决了上述问题,而且与其他算法相比有了显著的改进.该算法不需要对噪声的大小进行参数调整,可以在不同噪声大小的图像上显示出稳定准确的结果.本文从特征分析的角度对该问题进行了研究,探讨了PSO和小波的阈值处理方法在噪声图像分割中的应用前景.
1 相关概念
1.1 模糊C均值聚类和相关算法
模糊C均值(FCM)首先由Ruspin[9]引入,然后经由J.C.Dunn和J.C.Bezdek[10]推广到模糊聚类.它是一种聚类算法,其中所有数据点都被认为在某种程度上隶属于所有聚类.数据点(也就是像素)表示为一个集合,其中作为像素的维度向量与每个像素相关联.目的是以式(1)为目标函数最小化的方式找到C簇中心:

其中N和C分别为像素个数和簇数,uij为像素i到簇j的隶属度的值,需要满足m是加权指数.d(xi,cj)表示像素xi和聚类中心cj之间的距离,它在本文的方法中使用欧几里德度量.然后使用拉格朗日乘数得到式(2)、(3)两个更新方程,这些方程是必要的但还不足以使方程(1)最小:
1.2 小波变换
小波变换是一种为图像分析提供多分辨率表示的技术.小波变换的一个主要特性是它在实际信号中的稀疏性.这意味着它们包含一些信号大部分能量的大系数,其余的系数没有重要的信息,小波的这种特性对图像去噪是很有利的.要在图像上应用小波分解,首先需要通过沿行应用一维离散小波变换(1D-DWT),然后再应用图像的列来完成二维离散小波变换(2D-DWT).在图像上应用2D-DWT后,将其分解为四个子带.这四个子带是在垂直和水平方向上应用高通和低通滤波器的结果,分别称为HH1、LH1、HL1和LL1,或对角、水平、垂直和近似系数.LL1可以进一步分解得到第二尺度的另一组系数(图1(b)).
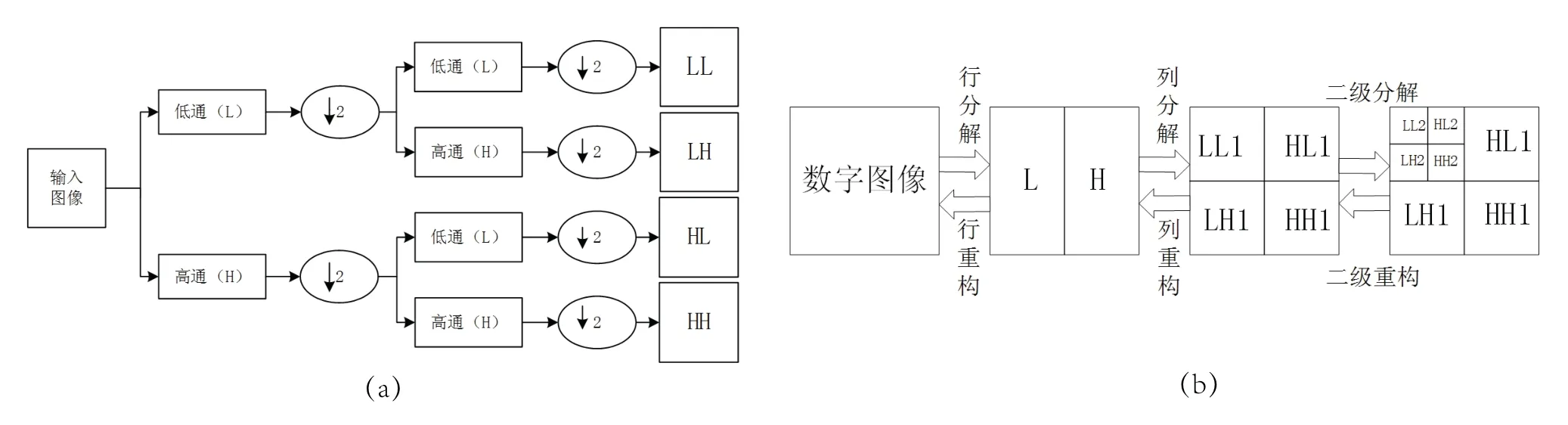
图1 二维离散小波变换过程(a)过滤器组分析;(b) 产生的双尺度分解Fig 1 Two-dimensional discrete wavelet transform process (a) filter group analysis; (b) generated two-scale decomposition
根据图1(a)的方框图,对尺寸为M×N的图像f(x,y)应用2D-DWT,使用式(4)进行变换:

其中j0是任意的起始尺度,而Wϕ(j0,m,n)系数定义了在j0尺度下f(x,y)的近似.Wψ(j,m,n)系数增加了j ≥j0尺度的水平、垂直和对角线细节.小波系数的阈值可以抑制噪声的影响,但确定合适的阈值是一项困难的工作.阈值不足会产生大量的噪声,导致图像中出现许多分割区域,而阈值过高的图像会使边界线发生变形,并导致边缘周围的分割区域出现冗余,而且过阈值化也会消除图像中的细节.
1.3 改进的PSO算法
粒子群优化(PSO)是由Kennedy和Eberhart在1995年提出的[11],它是一种生物体的社会行为,特别是正在觅食的鸟群.说到PSO的工作方式,它从一群潜在的解(种群大小)开始,这些解决方案根据它们在搜索空间中的位置和速度迭代更新.因此,粒子i具有位置,xi和速度vi.知道搜索空间是D维的,每个粒子由Xi=(xi1,xi2···,xiD)和Vi=(vi1,vi2···,viD)表示为每个粒子的位置和速度的数组.移动是基于pbest完成的,pbest是粒子的最佳先前位置,而gbest是迄今为止在搜索中获得的最佳位置.使用以下方法更新每个粒子的位置和速度,如(5)、(6)式所示:

其中n是搜索过程中的迭代次数,d ∈D表示第d维,ω是惯性权重,c1和c2是常数,r1和r2是[0,1]中的随机数.
由于传统的PSO速度慢且易陷于局部最优,文献[12]提出一种改进PSO,设置一个辅助最优点Xbest,通过正交实验得到,然后用来代替gbest,改进方案可以有效地避免粒子早熟现象而且寻优速度快,速度更新公式为式(7)所示:

每个解的拟合优度通过每次迭代中的适应性评估来确定,其根据应用来定义.当达到一定程度的准确度或迭代次数时,PSO收敛.
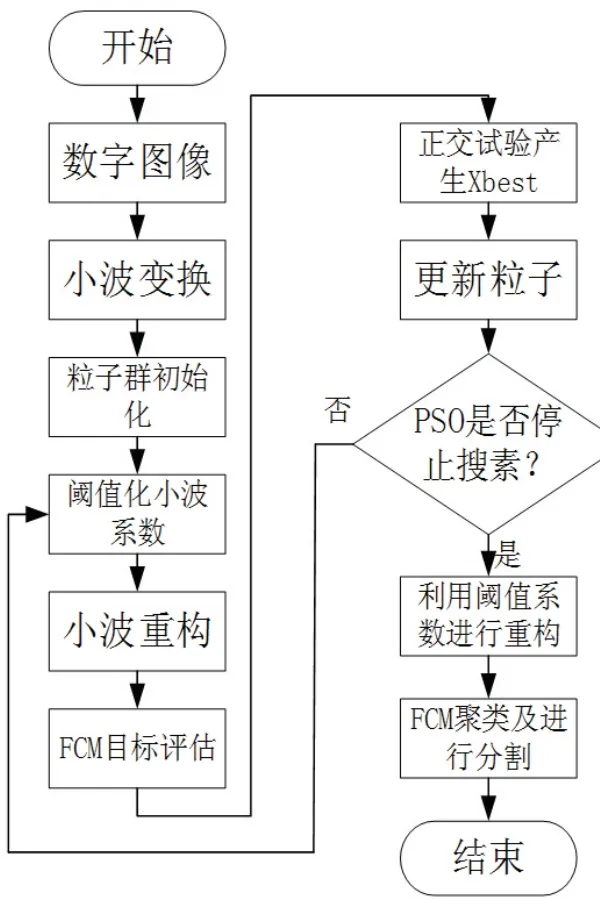
图2 本文所提方法流程图Fig 2 Flow chart of the method proposed in this paper
2 本文方法
本文提出了一种利用PSO自适应获取小波系数阈值的FCM噪声图像分割算法.该方法根据噪声大小和所考虑图像的性质,为每幅图像引入一组唯一的阈值.FCM聚类既参与了PSO中阈值化性能的评价,又参与了最终的分割过程.图2为所提方法的流程图.
其具体步骤:首先使用特定的小波函数在一定尺度上将图像转换为小波域;然后PSO搜索最佳阈值集合以阈值化从前一步骤获得的小波系数;再应用PSO搜索的小波系数进行最后的去噪;然后利用阈值后系数对图像进行重构,得到去噪后的图像;最后利用FCM对重建图像进行聚类,并根据各聚类的平均强度值进行分割.
2.1 PSO的表示
在本文的方法中,PSO用于小波系数的处理,因此会有更好的分割结果.更具体地说,PSO在不同尺度下寻找不同小波子带间阈值的最佳值.这给阈值化过程提供了根据噪声音量和图像属性调整阈值的自适应性.每个阈值粒子垂直、水平和对角线系数的每个标度具有不同的值.知道在每个尺度上有三个被称为水平、垂直和对角线的细节系数(或子带),每个变换尺度将有三个阈值.本文中,小波变换在五个尺度上执行.因此,每个粒子是一组15维阵列形式的潜在阈值,称为[θ1,θ2,···,θ15].为了防止粒子对系数进行欠阈值和过阈值处理,本文为每个阈值设置最小值和最大值,以便更好地收敛PSO搜索.最小值为零,最大值根据Visu Shrink方法[13]中提出的通用阈值获得.通用阈值由(8)式给出:

其中σ 是噪声标准偏差,n是图像中的像素数.由于σ 在本文的例子中是未知的,因此它使用来自最小尺度的小波系数的鲁棒中值估计器[13]获得,如(9)式所示:

其中x(i,j)是子带HH1的噪声系数.
2.2 小波变换和阈值处理
如前所述,处理小波系数的阈值是一项困难的任务,因为不正确的阈值或比例数可能导致不精确和不正确的分割结果.处理小波系数的阈值时,阈值必须足够大以衰减噪声的影响,并且它必须足够小以保留图像中的细节.同样的事情是尺度问题,如果比例太低,则无法正确进行去噪和分割,如果比例太大,细节将从图像中消失.根据经验,本文采用五个尺度的阈值小波系数能够在保持重要细节的同时显示出合适的分割性能.
处理小波系数的阈值时都需要阈值函数,通过该阈值函数对小波系数进行阈值处理.阈值函数确定了每个系数进行去噪的标准.本文选择了简单有效的软阈值函数[14](此函数中使用PSO寻找到的阈值)如(10)式所示:

其中X是小波系数,ρ是阈值.
2.3 适应度评估
每个粒子的阈值性能需要在PSO的每次迭代中进行评估.为此,本文对阈值系数余下的部分执行反向小波变换以重建去噪图像,利用重建图像的每个像素的强度值作为FCM的聚类特征,然后通过FCM的聚类效果来评估PSO中的适应度量.为了测量FCM聚类效果,在方程式中引入了FCM目标函数公式(1),即采用FCM目标函数用作粒子性能评估的适应度函数.在搜索的每次迭代中,都要测试群体中的潜在解,并且将最佳粒子传达到下一次迭代.
3 设计实验
为了全面评估所提出的方法,本文在MTALAB R2010a进行仿真实验测试了本文方法,Berkeley数据集专门用于图像分割和边界检测.对于这个数据集,选择了3张名为196027、42049、3096的图像进行实验.根据真实图像的主要紧凑区域,将两者聚类数预先确定为2.图(a)为数据集的原始图像.然后,对每张图像加入不同程度的高斯噪声,本实验对噪声程度设置分别为20%、40%和80%,以探讨本文方法的性能随着噪声量的变化如何变化.为了定量评价,本文使用分割精度(SA)[4],如(11)所示:

其中,Ai表示属于分割图像中的第i个簇的分割像素的数量,Si是属于真实图像中的第i个簇像素的数量.
为了验证本文方法的性能,将本文方法与两种经典算法PSOFCM和FGFCM进行了比较.
3.1 参数设置
PSO、FCM和小波变换都有需要设置的参数,本文之前已经提到过一些.表1显示了所提算法的全部参数,以及在实验中分配给它们的值.
FGFCM算法需要调整参数γg和γs以获得最佳性能.如[15]所示,当γg=6、γs=3 时,FGFCM算法为最佳性能.为了保持比较公平,所有比较方法的周围窗口设置为7*7像素.已经在所有这些窗口中使用该窗口来收集来自相邻像素的信息、构建特征,然后将其归属于所考虑的像素.
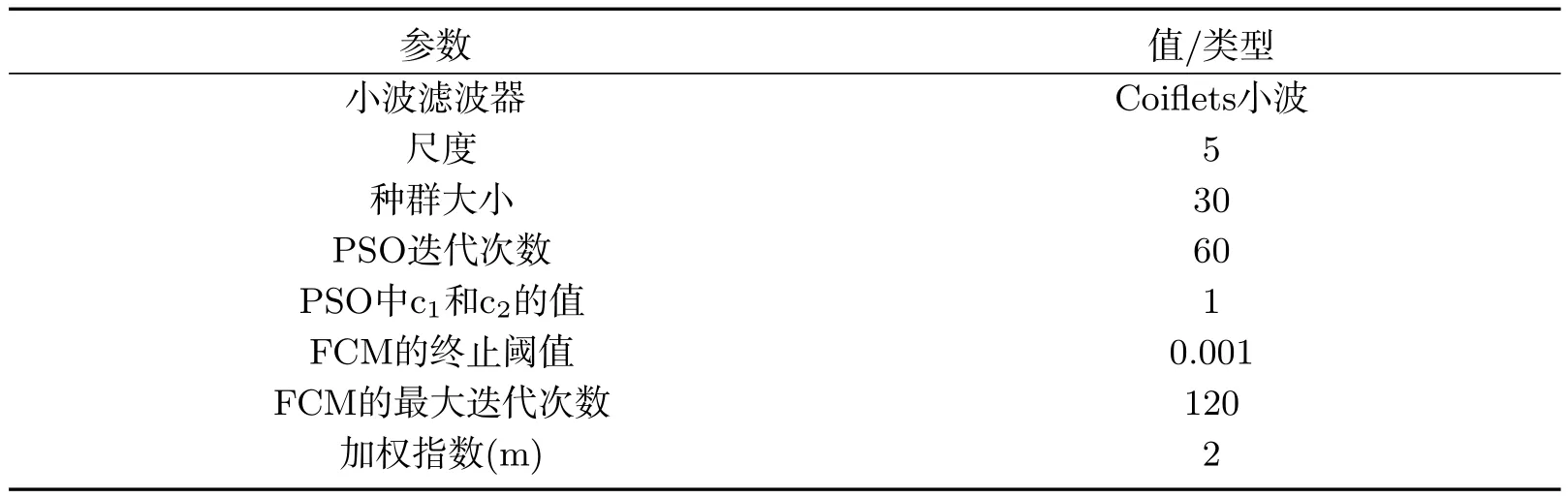
表1 所提方法的参数设置Tab 1 Parameter settings for the proposed method
3.2 实验结果
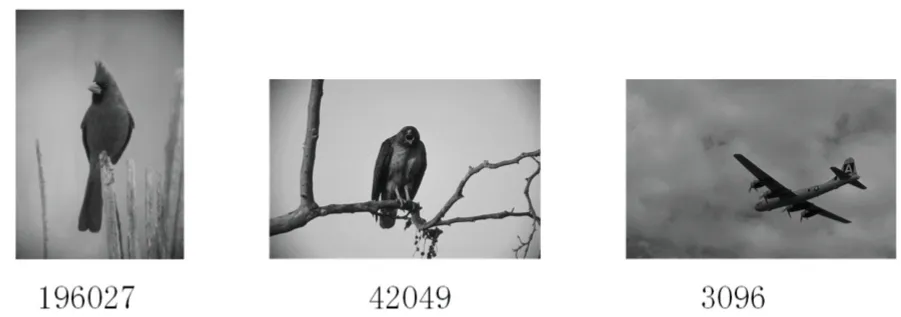
图3 原始图像Fig 3 Original image
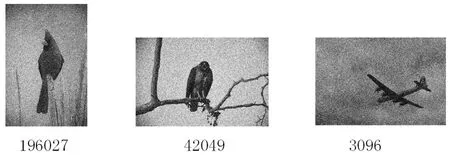
图4 加入20%噪声的图像Fig 4 Adding a 20% noise image
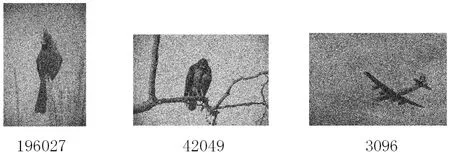
图5 加入40%噪声的图像Fig 5 Adding a 40% noise image

图6 加入80%噪声的图像Fig 6 Adding a 80% noise image

图7 加入20%噪声后的图像分割Fig 7 Image segmentation after adding 20% noise

图8 加入40%噪声后的图像分割Fig 8 Image segmentation after adding 40% noise

图9 加入80%噪声后的图像分割Fig 9 Image segmentation after adding 80% noise
图3为原图像,图4、图5、图6为分别加入不同程度的噪声后图像.为了定性地比较本文的方法与其他方法的分割结果,图7、图8、图9提供了整体27幅噪声图像的9幅样本,对三个程度的噪声分别选择一幅图像,进行比较三种方法的分割结果.可以看出本文算法都很好的从噪声图像中得到较好的图像分割.
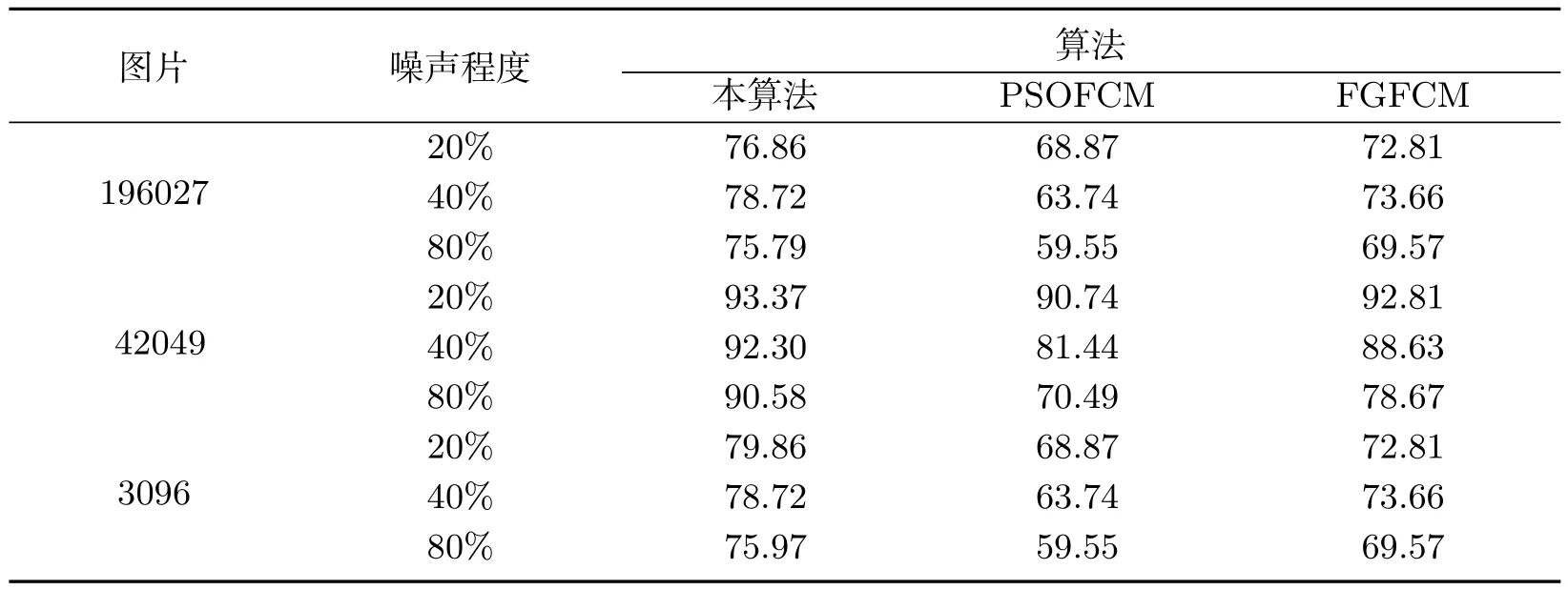
表2 Berkeley数据集的SA值Tab 2 SA values for the Berkeley data set
在本数据集中,根据分割精度(SA)的值,分析表2的结果,对三张不同图像,被噪声污染程度也不同的情况下,本文的方法都优于另外两种方法PSOFCM和FGFCM.
为了进一步分析噪声量变化对算法性能的影响,我们进行了另一项分析,测量每个图像的每种方法的SA方差,196 027取噪声程度20%的图像,42 029取噪声程度40%的图像,3 096取噪声程度80%的图像,然后比较所有方法的结果.表3提供了这样的比较.

表3 噪声量变化对SA值的影响Tab 3 Effect of noise amount change on SA value
该表显示了每个图像上每种方法的SA方差值.由表可知本文的方法远小于另两种方法,这表明,即使噪声量有很大的多样性,该算法的分割性能并没受到太大影响,具有较好的性能.
4 结语
提出了一种新的噪声图像分割方法,该方法利用小波变换、粒子群和模糊C均值聚类三者共同作用的图像分割算法.其中,在PSO搜索中,FCM既是一种适应度度量,又是一种图像分割的算法.与其他基于FCM的噪声图像分割方法不同,本文提出的算法从特征操作的角度来研究该问题.为了简化新方法的独特特性,本文提到了三个要点:1)它在严重噪声的图像上表现出相当好的性能;2)它不需要对不同的噪声水平进行参数调整;3)即使噪声量有很大的变化,它也能产生相当稳定的结果.未来的工作将探索该方法对其他类型的噪声的潜力.
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
铁道通信信号(2019年6期)2019-10-08
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
雷达学报(2017年6期)2017-03-26
太空探索(2016年5期)2016-07-12
互联网天地(2016年1期)2016-05-04
CHIP新电脑(2016年3期)2016-03-10
智能系统学报(2015年4期)2015-12-27
