
大棚杆状蔬菜收割机器人
2020-01-07 22:12刘以强贾昊林郑明东李亮亮马秋环
科学导报·学术 2020年52期
刘以强 贾昊林 郑明东 李亮亮 马秋环

【摘 要】长杆状蔬菜收割、传送、聚合,省去人工采摘的步骤,提高收割效率。机器人主要由收割装置、传送装置等部分组成。收割装置在机器人最前端,由交叉切刀组成,通过双刀的交错将蔬菜切断,利用惯性顺势倒在传送装置中。传送装置由两部分组成,第一部分为斜向上的传送带,通过控制器控制小车带将蔬菜运送到后方的收集区域,第二部分为收集区域,经过该区域的整理然后通过传感器接收到信号,然后运送到地面。该装置结构简单、易操作,为菜农的收割、包装工作提供方便。
【关键词】杆状蔬菜收割、机器人、传感器、控制器
1 绪论
现阶段我国大棚蔬菜种植非常普遍,大棚种植蔬菜可以改变某些蔬菜因季节差异而无法存活的问题。可以让我们在任何季节都能吃到各种各样的新鲜蔬菜。我国北方多数地区拥有大棚种植户,其种植的蔬菜数量多,种类多,并且在大棚内部无法用大型机器收割。只能用人工进行收割,这为农户带来大量的工作负担。
2工作原理
该装置利用STM32RCT6单片机控制,利用蓝牙模块进行远程操作,通过交错切刀的往复运动实现蔬菜的收割,随后通过传送机构与收集机构的配合完成蔬菜的收集。
3 结构设计
3.1驱动模块
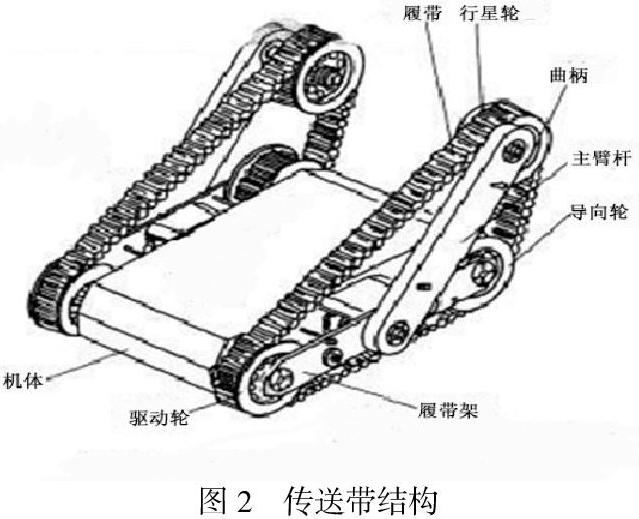
整个机器的运动采用履带轮驱动,在蔬菜种植在大棚中,地形多为坑坑洼洼的泥土地,因此我们选用履带驱动机构将有效解决此类问题。履带驱动系统的主电动机带动驱动轮运动,使履带转动。主臂电动机通过与电动机同轴的小齿轮与齿轮1啮合,一方面带动主臂杆转动;另一方面通过齿轮2、齿轮3和齿轮4的啮合,带动链轮旋转;链轮通过链条进一步使安装行星轮的曲柄回转。因为齿轮1和4,齿轮2和3的齿数分别相同,因此齿轮1和齿轮4的转速一致,而方向相反。加上链条两端的链轮齿数相等,使得主臂电动机工作时,主臂杆转过的角度与曲柄的绝对转角大小相等、方向相反。
3.2传送带模块
传动机构分为前后两部分,前方由斜向上的传送履带构成,该履带用一个直流减速电动机驱动。履带上方包裹橡胶,增大摩擦力,方便蔬菜传送。后方设有挡板,目的是将蔬菜汇总到一起,从一个地方传送到后方运送机构中。后方运动机构为横向传送带机构。传送带上有收集装置。蔬菜经过收集装置聚拢然后一扎一扎的运送到地面上。
3.3检测收割装置
该机构由电动机进行驱动,由上下两把相互交错的锯齿状刀片形成。通过四杆机构与电动机相连。下方刀片进行固定,上方刀片为活动刀片。电动机转动带动曲柄进行转动。通过摇杆连接到上方刀片带动刀片左右移动,从而进行蔬菜的切割。装置上采用光电管来作为检测模块,利用光电管检测物体来进行传送带运动。
3.4远遥控装置
操作方式采用远程遥控,使用蓝牙装置,在一定范围内进行工作,人工遥控提高工作效率,更能增加任务完成的成功率。蓝牙模块操作简单,不需要专门培训,只需了解遥控按键即可上手操作,方便快捷。
4软件介绍
本部分主要采用Keil STM32进行编写,Keil STM32是美国Keil Software公司出品的32系列兼容单片机C语言软件开发系统,与汇编相比,C语言在功能上、结构性、可读性、可维护性上有明显的优势,因而易学易用。用过汇编语言后再使用C来开发,体会更加深刻。Keil STM32软件提供丰富的库函数和功能强大的集成开发调试工具,全Windows界面。另外重要的一点,只要看一下编译后生成的汇编代码,就能体会到Keil STM32生成的目标代码效率非常之高,多数语句生成的汇编代码很紧凑,容易理解。在开发大型软件时更能体现高级语言的优势。下面详细介绍Keil STM32开发系统各部分功能和使用。
5结论
大棚杆状蔬菜收割机器人主要用于收集大棚内长杆状蔬菜,省去人工采摘的步骤,节省人力、增加收割效率。机器人主要由收割装置、传送装置、捆扎装置等部分组成。收割装置由交叉切刀组成,通过双刀的交错将蔬菜切断,利用惯性倒在传送裝置中。传送装置由两部分组成,首先为斜向上的传送带,将蔬菜运送到后方,其次为收集区域,经过该区域的整理后与扎捆装置配合,将蔬菜进行扎捆。该装置结构简单、易操作,为菜农的收割、包装提供方便。机器人工作有利于节省人工,远程遥控在人为的控制下工作,大大提高生产效率,具有现实应用的可能和广阔的应用前景,能成为未来蔬菜收割行业的主流方向和发展趋势。减少人员劳动力,更能减少成本,提高效率的基础上提高利润。一机多用,可用于采集多种蔬菜更大程度上减少机器及生产成本。
参考文献:
[1]李万义,谢林汐,肖锋,程闫.基于STM32的智能小车寻迹避障系统硬件设计[J].电子世界,2019(07):196-197.
[2]王晓英.谷物联合收割机适用性问题及技术难点分析[J].农机使用与维修,2019(02):13-14.
[3]余杰,王梓宇,刘顺楚.可登楼梯式履带轮设计[J].科技风,2018(30):25.
[4]牛瑞霞,张锦义,徐跃銮.曲柄滑块机构等效转动惯量的计算及应用[J].锻压装备与制造技术,2018,53(04):15-16.
[5]陈威,陈静.基于多传感器的智能小车避障控制系统设计[J].工业控制计算机,2018,31(07):41-42.
[6]董靖川,张朝,温洋,窦一喜,赵鹏飞,王星.基于STM32的低碳避障实验小车电控设计[J].实验技术与管理,2017,34(12):45-49.
[7]尚军. 电动传送带车结构设计研究[D].中国民航大学,2017.
[8]袁洁. 往复式甘蔗收割机设计及仿真分析[D].昆明理工大学,2017.
作者简介:
刘以强(1998.3.18),男,山东省聊城人,学士,研究方向:控制工程。
贾昊林(1998-2020),男,山东省烟台人,学士,研究方向:控制工程。
郑明东 2000.9.24,男,山东省济宁人,学士,研究方向:控制工程。
李亮亮(1998-),男,山东省日照市人,学士,研究方向:控制工程。
马秋环(1983-),男,山东省菏泽人,硕士,副教授,研究方向:控制工程。
基金项目:
该项目由国家级创新创业训练项目《大棚杆状蔬菜收割机器人》(S202013320007)支持。
(作者单位:青岛黄海学院)
猜你喜欢
中国自行车(2022年3期)2022-06-30
当代化工(2020年4期)2020-08-24
中国电子报(2019年54期)2019-10-24
网络空间安全(2019年8期)2019-03-18
时代英语·高一(2019年1期)2019-03-13
中学物理·初中(2017年8期)2018-03-06
新高考·高一物理(2015年5期)2015-08-18
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
